

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
«Кольцо» Н. А. Бернштейна; она более детализована и поэтому позволяет гораздо полнее представить процесс управления двигательными актами.
Имеются моторные «выходы» (эффектор), сенсорные «входы» (рецептор), рабочая точка или объект (если речь идет о предметном действии) и блок перешифровок. Новыми являются несколько центральных блоков – программа, задающий прибор и прибор сличения.
Кольцо функционирует следующим образом. В программе записаны последовательные этапы сложного движения. В каждый данный момент отрабатывается какой-то ее частный этап, или элемент, и соответствующая частная программа спускается в задающий прибор.
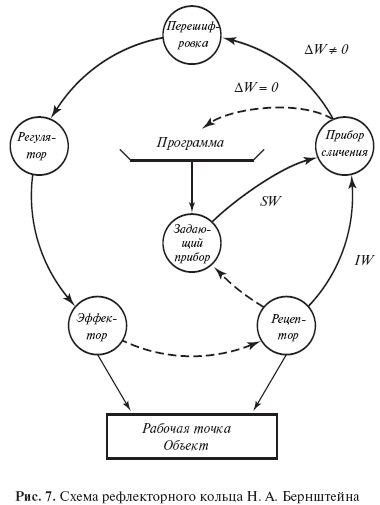
Из задающего прибора сигналы поступают на прибор сличения; Н. А. Бернштейн обозначает их двумя латинскими буквами SW (от нем. SollWert, что означает «то, что должно быть»). На тот же блок от рецептора приходят сигналы обратной связи, сообщающие о состоянии рабочей точки; они обозначены IW(от нем. IstWert, что означает «то, что есть»). В приборе сличения эти сигналы сравниваются, и на выходе из него получаются DW, т. е. сигналы рассогласования между требуемым и фактическим положением вещей. Они попадают на блок перешифровки, откуда выходят сигналы коррекции; через промежуточные центральные инстанции (регулятор) они попадают на эффектор.
Разберем функционирование кольца управления на примере какого-нибудь реального движения.
Предположим, гимнаст работает на кольцах. Вся комбинация целиком содержится вегодвигательнойпрограмме. В соответствии с программой ему нужно в какой-то момент сделать стойку на руках (кстати, труднейший элемент!).
Из программы спускается в задающий прибор соответствующий приказ, и в нем формируются сигналыSW, которые идут на прибор сличения. Эти сигналы будут сличаться с афферентными сигналами (IW).Значит, сами они должны иметь сенсорно-перцептивную природу, т. е. представлять собой образ движения. Такой образ обеспечивается прежде всего сигналами проприоцептивной и зрительной модальностей; это «картина» стойки и с точки зрения ее общего вида, и с точки зрения ее двигательно-технического состава – положения, частей тела, центра тяжести, распределения тонуса различных мышц и т. п.
|
|
Итак, в прибор сличения поступают и образ движения, и информация от всех рецепторов о реализованном движении.
Предположим, что, выходя на стойку, спортсмен сделал слишком сильный мах и его начало клонить назад, – возникает опасность опрокинуться. Что тогда происходит? С прибора сличения поступили на блок перешифровки сигналы об излишней тяге назад. Эти сигналы (DW) сообщают, что не все в порядке, что нужно послать сигналы коррекции, выправляющие это положение. Такие сигналы поступают, поправка происходит. В следующем цикле кольца снова сличаются сигналы SW и IW. Может оказаться, что DW = 0; это идеальный случай. Он означает, что данный элемент выполнен и можно перейти к реализации следующего пункта программы.
На схеме Бернштейна можно видеть одну интересную стрелку, которая идет от рецептора на задающий прибор. Она означает следующее: по ходу движения случаются такие ситуации, когда экономичнее не давать коррекции к текущему движению, а просто перестроить его, пустить по другому руслу, т. е. изменить его частную программу. Тогда соответствующее решение принимается в микроинтервалы времени, и в этом обнаруживается двигательная находчивость организма. Таким образом, может иметь место не только спокойный «спуск» частных программ в задающее устройство, но и экстренная их перестройка. Я думаю, что подобные примеры вы легко найдете сами. Такое случается в условиях борьбы хищника и жертвы, встречи боксеров, в спортивных играх и т. п., где ситуация постоянно меняется.
Итак, были разобраны принцип сенсорных коррекций и вытекающая из этого принципа схема управления по рефлекторному кольцу.
35. Факторы, определяющие величину сдвигов во время мышечной работы: мощность и длительность работы, уровень физической подготовленности, эмоциональный фон.
|
|
|

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!