

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Дистанционные передачи служат для передачи информации об угловых перемещениях ЛА экипажу. Измерение угловых перемещений ЛА осуществляется с помощью гироскопических приборов, которые располагаются вблизи центра его масс или в других специально отведенных местах. Эта информация должна передаваться на индикаторы, располагающиеся на приборной доске.
Основными показателями качества работы дистанционных передач (ДП), наряду с общими для всех приборных устройств ЛА, являются статические и динамические погрешности и длительность переходного процесса.
Для дистанционной передачи угловых перемещений в ЛА нашли применение следующие ДП:
– потенциометрические;
– сельсинные;
– ДП на поворотных трансформаторах.
Индикаторная потенциометрическая ДП
Индикаторная потенциометрическая ДП служит для передачи угла поворота щеток потенциометра гироскопического датчика на индикаторы (указатели). Данная передача нашла применение в дистанционных гиромагнитных компасах и курсовых системах. Схема передачи приведена на рис.3.39.
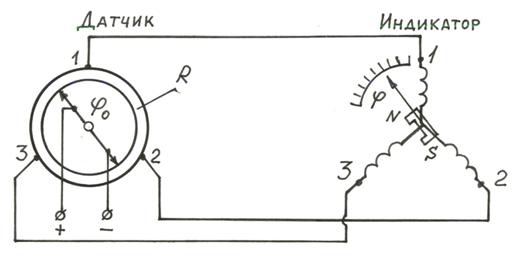
Рис.3.39. Принципиальная схема потенциометрической дистанционной передачи.
Передача состоит из кольцевого потенциометрического датчика и трехкатушечного логометра с подвижным магнитом (повторителя). Напряжения на участках 1-2, 2-3 и 3-1 потенциометра создают токи в обмотках (катушках) логометра. За счет протекания токов в обмотках повторителя формируются магнитные потоки. Результирующий магнитный поток определяет угловое положение магнита, закрепленного на подвижной системе индикатора. Принцип действия трехрамочного логометра поясняется рис.3.40.
Когда щетки потенциометра занимают положение, показанное на рис.3.40,а, по рамкам логометра протекают токи указанных направлений, причем  . Векторы напряженностей магнитных полей, созданных этими токами, перпендикулярны плоскостям соответствующих рамок и образуют векторную диаграмму, представленную на рис.3.40,б, а их величины находятся в таком же соотношении
. Векторы напряженностей магнитных полей, созданных этими токами, перпендикулярны плоскостям соответствующих рамок и образуют векторную диаграмму, представленную на рис.3.40,б, а их величины находятся в таком же соотношении  . В этом случае результирующий вектор напряженности
. В этом случае результирующий вектор напряженности  , подвижный магнит и связанная с ним стрелка логометра занимают вертикальное положение.
, подвижный магнит и связанная с ним стрелка логометра занимают вертикальное положение.
|
|
При повороте щеток относительно потенциометра на угол  токи в рамках
токи в рамках  и
и  , а следовательно и напряженности
, а следовательно и напряженности  и
и  изменяют свое направление на противоположное. При этом токи и напряженности находятся в следующем соотношении:
изменяют свое направление на противоположное. При этом токи и напряженности находятся в следующем соотношении:
 ;
; 
Вектор результирующей напряженности , а следовательно магнит и стрелка логометра поворачиваются на угол, равный углу поворота щеток потенциометра.
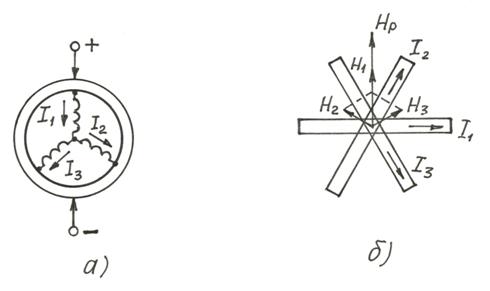
Рис.3.40. Схемы, поясняющие принцип действия трехрамочного логометра.
При промежуточном положении щеток потенциометра токи , и  , а следовательно и напряженности , и
, а следовательно и напряженности , и  имеют такие соотношения, что обеспечивают соответствующее промежуточное направление вектора , магнита и стрелки логометра.
имеют такие соотношения, что обеспечивают соответствующее промежуточное направление вектора , магнита и стрелки логометра.
Обычно протекающие по обмоткам логометра токи сравнительно небольшие, поэтому устанавливающий момент, действующий на подвижную систему, также небольшой, и погрешности от трения в опорах подвижной системы могут достигать ±3о.
Более высокую точность имеет электромеханическая потенциометрическая ДП.
Электромеханическая потенциометрическая ДП
Электромеханическая ДП состоит из двух потенциометров R1 и R2 (рис. 3.41.). Потенциометр R1, является датчиком, а R2 – повторителем. Щетки повторителя, укрепленные под углами 120о на общем щеткодержателе, могут поворачиваться отрабатывающим двигателем с редуктором.
В данной электрической схеме для любого положения щеток а-в на потенциометре R1 имеется такое положение щеток 1¢, 2¢, 3¢ на потенциометре R2, при котором на щетках а-в напряжение U1 становится равным нулю.
|
|
Рассмотрим работу данной ДП. Пусть исходное положение передачи является согласованным, т.е. щетки потенциометра R2 находятся в таких положениях, когда  и
и  . Пусть на потенциометр R1 поступает сигнал в виде поворота щеток а-в на угол
. Пусть на потенциометр R1 поступает сигнал в виде поворота щеток а-в на угол  . Перемещение щеток а-в приводит к появлению сигнала в виде напряжения U1, которое после усиления подается на обмотку управления отрабатывающего двигателя. Двигатель через редуктор разворачивает подвижную систему повторителя со щетками 1¢, 2¢, 3¢ на угол, при котором сигнал U1 вновь станет равным нулю. Этот угол
. Перемещение щеток а-в приводит к появлению сигнала в виде напряжения U1, которое после усиления подается на обмотку управления отрабатывающего двигателя. Двигатель через редуктор разворачивает подвижную систему повторителя со щетками 1¢, 2¢, 3¢ на угол, при котором сигнал U1 вновь станет равным нулю. Этот угол  .
.
Электромеханическая потенциометрическая ДП имеет статическую погрешность, хотя и сравнительно небольшую. Однако данной ДП присущи все недостатки, свойственные потенциометрам.

Рис.3.41. Принципиальная схема электромеханической потенциометрической дистанционной передачи.
Сельсинные дистанционные передачи
Сельсин представляет собой электрическую машину, работающую в схемах измерения и дистанционной передачи угловых перемещений, и имеющую две обмотки. Обмотка О-О (рис.3.42.) имеет одноосное пространственное расположение и называется однофазной обмоткой. Обмотка a-в-c состоит из трех секций, соединенных «звездой», секции обмотки имеют пространственный фазовый сдвиг на 120о одна относительно другой, поэтому обмотка a-в-c является трехфазной. Одна из обмоток (как правило, однофазная) располагается на роторе, а обмотка a-в-c на статоре сельсина.
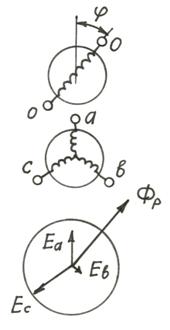
Рис.3.42. Принципиальная схема сельсина.
Если обмотку О-О включить в сеть переменного тока, то проходящий по ней ток создает переменный магнитный поток Фр. Ось этого потока соответствует направлению оси обмотки О-О. Магнитный поток пронизывает трехфазную обмотку, расположенную на статоре, и наводит в каждой из ее секций ЭДС. Величины ЭДС  зависят от углов между осью потока Фр и осью секции. Максимальная величина наводимой ЭДС имеет место при соосном расположении потока и оси секции. Обозначив угол между осями обмоток О-О и a через
зависят от углов между осью потока Фр и осью секции. Максимальная величина наводимой ЭДС имеет место при соосном расположении потока и оси секции. Обозначив угол между осями обмоток О-О и a через  , ЭДС в фазах находятся по формулам:
, ЭДС в фазах находятся по формулам:

| (3.68.) |
где  – максимальная величина ЭДС.
– максимальная величина ЭДС.
Положение обмотки О-О изменяется при поворотах ротора сельсина. При этом величины ЭДС также изменяются, так как сельсин работает при этом аналогично трансформатору с подвижной обмоткой в режиме холостого хода.
|
|
Трехфазная обмотка статора сельсина называется обмоткой синхронизации. Если она замкнута на какую-либо нагрузку или сама является нагрузкой для внешней ЭДС, то в ее секциях проходят токи, которые создают переменные магнитные потоки Фа, Фв,  Фс, которые складываются по правилам векторного суммирования и дают результирующий магнитный поток статора Фс.
Фс, которые складываются по правилам векторного суммирования и дают результирующий магнитный поток статора Фс.
Сельсинная индикаторная дистанционная передача
Сельсинная индикаторная дистанционная передача служит для дистанционной передачи углового перемещения оси гироскопического датчика. Однофазные обмотки роторов сельсина-датчика (СД) и сельсина-приемника (СП) включены в общую сеть переменного тока, а их трехфазные обмотки синхронизации электрически соединены между собой и образуют общие электрические цепи синхронизации (рис. 3.43.). Ротор СД механически связан с осью, угол поворота которой необходимо передавать, ось СП имеет стрелку, с помощью которой осуществляют отсчет передаваемого углового перемещения.
Входным сигналом индикаторной ДП является угловое рассогласование  (разность угловых положений роторов СД и СП)
(разность угловых положений роторов СД и СП)

| (3.69.) |
Выходным сигналом сельсинной индикаторной ДП является синхронизирующий момент, который стремится повернуть ротор СП в согласованное положение, определяемое условием 
При отклонении ротора СД от согласованного положения на угол  , значения ЭДС изменяются. Возникает разность ЭДС в цепях синхронизации, и по ним потекут токи I1, I2, I3, которые, протекая по обмоткам синхронизации СД и СП, создадут в их магнитных системах магнитные потоки, не совпадающие по направлениям с потоками возбуждения. Таким образом, в СП и СД будут действовать магнитные потоки, не совпадающие по направлению. Их взаимодействие в СП создаст момент, который называются синхронизирующим. Он будет стремиться повернуть ротор в согласованное положение. Синхронизирующий момент, определяется по формуле
, значения ЭДС изменяются. Возникает разность ЭДС в цепях синхронизации, и по ним потекут токи I1, I2, I3, которые, протекая по обмоткам синхронизации СД и СП, создадут в их магнитных системах магнитные потоки, не совпадающие по направлениям с потоками возбуждения. Таким образом, в СП и СД будут действовать магнитные потоки, не совпадающие по направлению. Их взаимодействие в СП создаст момент, который называются синхронизирующим. Он будет стремиться повернуть ротор в согласованное положение. Синхронизирующий момент, определяется по формуле

| (3.70.) |
Сельсинная индикаторная передача является в электромагнитном отношении обратимой, то есть синхронизирующий момент действует как на ротор СП, так и на ротор СД, вызывая погрешность в передаче.
|
|
Другим существенным недостатком данной передачи является значительная статическая погрешность, вызываемая действием моментов трения в СП, так как при относительно небольших углах рассогласования  также небольшой. Общая величина статической погрешности сельсинной индикаторной дистанционной передачи составляет до
также небольшой. Общая величина статической погрешности сельсинной индикаторной дистанционной передачи составляет до  , поэтому в настоящее время индикаторная ДП практически не применяется.
, поэтому в настоящее время индикаторная ДП практически не применяется.

Рис.3.43. Схема сельсинной индикаторной ДП.
Электромеханическая (трансформаторная) сельсинная дистанционная передача
Данная передача в значительной степени свободна от недостатков, которые характерны для индикаторной ДП. Принципиальная схема трансформаторной сельсинной ДП приведена на рис. 3.44.
Магнитный поток с ротора СД Ф1 наводит ЭДС в обмотках синхронизации СД. Токи синхронизации наводят в статоре СП магнитный поток Ф2 такого же направления, как и Ф1. Поэтому, если ротор СД повернется на какой-либо угол, то вместе с ним повернется в пространстве и вектор магнитного потока Ф2 СП. Ось обмотки ротора СП перпендикулярна оси обмотки СД. В этом положении ЭДС в обмотке ротора СП равна нулю и следовательно сигнал на управляющей обмотке серводвигателя Д также равен нулю. При повороте ротора СД в обмотке ротора СП появляется ЭДС, величина которой пропорциональна углу поворота вала СД. Этот сигнал подается на обмотку управления серводвигателя. Он начинает отрабатывать сигнал рассогласования в сторону его уменьшения, одновременно разворачивая стрелку СП, механически связанную через редуктор с валом двигателя. При достижении согласованного положения  сигнал на обмотке управления двигателя становится равным 0 и двигатель останавливается.
сигнал на обмотке управления двигателя становится равным 0 и двигатель останавливается.

Рис.3.44. Схема сельсинной трансформаторной ДП. Д – двигатель; Р – редуктор.
Данная передача имеет статическую погрешность гораздо меньшую, чем сельсинная индикаторная ДП. Главным недостатком трансформаторной ДП является динамическая погрешность, вызванная инерционностью двигателя с редуктором при значительных скоростях отработки рассогласования.
Для отработки угла поворота повторителя с большими скоростями используется сельсинная дистанционная передача с тахогенератором (рис. 3.45.). Она отличается от предыдущей тем, что на вход усилителя подается напряжение отрицательной скоростной обратной связи. Благодаря этому, ротор СП подходит к согласованному положению с СД со скоростью, стремящейся к нулю, что устраняет перерегулирование.
При отработке сигнала рассогласования с большими скоростями необходимо увеличивать коэффициент усиления усилителя К1. Если U1 – напряжение сигнала рассогласования, то пусковой момент двигателя равен
|
|

| (3.71.) |
Так как этот момент уравновешивает все механические моменты подвижной системы с параметрами J,C, Mсопр, то
| (3.72.) |
или

| (3.73.) |
При наличии на входе усилителя сигнала с тахогенератора уменьшается пусковой момент, т.е.

| (3.74.) |
Уравнение движения подвижной системы примет вид

| (3.75.) |
Таким образом увеличивается удельный демпфирующий момент, что приводит к снижению колебаний в переходном режиме. Практически при использовании в таких передачах двигателя-генератора типа МДГ, длительность переходного процесса снижается  в 2 раза.
в 2 раза.

Рис.3.45. Схема сельсинной трансформаторной ДП с тахогенератором.
Д – двигатель; Г – генератор; Р – редуктор; У – усилитель.
Дистанционная передача с дифференциальным сельсином
Дифференциальный сельсин (ДФС) предназначен для дополнительного поворота ротора на угол  , который передается обычными трансформаторными сельсинами или для согласования двух сельсинов, имеющих различные углы поворота ротора. ДФС имеет трехфазный статор и трехфазный ротор и включается в схему дистанционной передачи между СД и СП. Если обмотки ротора и статора ДФС находятся в согласованном положении, то в обмотках ротора наводятся такие же три ЭДС, которые имеет статор. Эта система трех сигналов в виде напряжений без изменения поступает дальше в СП. Если ротор ДФС будет повернут на некоторый угол
, который передается обычными трансформаторными сельсинами или для согласования двух сельсинов, имеющих различные углы поворота ротора. ДФС имеет трехфазный статор и трехфазный ротор и включается в схему дистанционной передачи между СД и СП. Если обмотки ротора и статора ДФС находятся в согласованном положении, то в обмотках ротора наводятся такие же три ЭДС, которые имеет статор. Эта система трех сигналов в виде напряжений без изменения поступает дальше в СП. Если ротор ДФС будет повернут на некоторый угол  , то тогда изменяются значения ЭДС, наводимых в роторе ДФС, что приведет к повороту ротора повторителя на такой же угол. Схема дистанционной передачи с дифференциальным сельсином приведена на рис. 3.46.
, то тогда изменяются значения ЭДС, наводимых в роторе ДФС, что приведет к повороту ротора повторителя на такой же угол. Схема дистанционной передачи с дифференциальным сельсином приведена на рис. 3.46.

Рис.3.46. Схема дистанционной передачи с дифференциальным сельсином.
Д – двигатель; Г – генератор; ДФС – дифференциальный сельсин; Р – редуктор; У – усилитель.
Таким образом, ДФС используется при соединении двух систем, то есть СД и СП, которые должны иметь некоторый угол рассогласования. В этом случае дифференциальный сельсин должен иметь между статором и ротором именно такой угол рассогласования, то есть ДФС играет роль своего рода «соединительной муфты» между двумя осями датчиков, имеющими взаимный сдвиг по углу. Дифференциальный сельсин нашел применение в астрономическом компасе ДАК-ДБ и курсовых системах.
Двухканальная сельсинная дистанционная передача
Двухканальные сельсинные дистанционные передачи применяются для повышения точности передачи угла поворота ротора СД. Точность передачи определяется синхронизирующим моментом, который должен преодолеть момент сил трения при малых углах рассогласования. Для трансформаторной дистанционной передачи устанавливающий момент будет зависеть от остаточного напряжения U0 на входе усилителя. При напряжении, меньшем U0, СП не будет отрабатывать сигнал рассогласования, и между СД и СП останется угол рассогласования  . Двухканальный сельсин состоит из двух жестко связанных сельсинов, расположенных на одной оси и называемых грубым и точным (рис. 3.47,а). Точный сельсин имеет требуемое повышенное остаточное напряжение U0 при малых углах рассогласования
. Двухканальный сельсин состоит из двух жестко связанных сельсинов, расположенных на одной оси и называемых грубым и точным (рис. 3.47,а). Точный сельсин имеет требуемое повышенное остаточное напряжение U0 при малых углах рассогласования  .
.
Повышение напряжения U0 достигается тем, что у точного сельсина увеличено число пар полюсов (2р). Поэтому при одних и тех же малых углах рассогласования зависимость изменения сигнала точного сельсина UТ имеет большую крутизну, чем зависимость сигнала грубого сельсина (рис. 3.47,б).
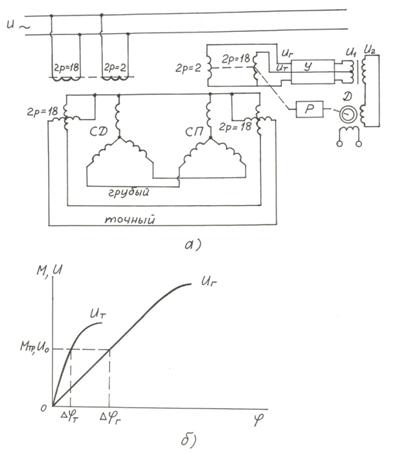
Рис.3.47. Двухканальная сельсинная ДП.
а – принципиальная схема передачи; б – зависимости выходного сигнала от угла поворота ротора.
Однако, амплитуда сигнала у грубого сельсина больше. Таким образом, при малых углах рассогласования большим сигналом является сигнал точного сельсина UТ и ротор сельсина-приемника устанавливается, благодаря этому сигналу. При больших углах рассогласования большим является сигнал грубого сельсина UГ, и ротор СП устанавливается, благодаря этому сигналу. При одних и тех же моментах сил трения в опорах ротора СП и напряжении U0 погрешность точного канала передачи уменьшается по сравнению с погрешностью грубого канала в соответствии с выражением
| (3.76.) |
где р=9 –число пар полюсов точного сельсина (для грубого сельсина р=1).
Конструктивно двухканальные сельсины представляют собой расположенные на одной оси кольцевые роторы и статоры.
При 2р=18 для точного сельсина удобно иметь двухфазный статор. Двухканальные сельсинные дистанционные передачи нашли применение в курсовых системах типа КС.
Дистанционные передачи на поворотных трансформаторах
Одноканальная дистанционная передача на поворотных трансформаторах
Схема одноканальной передачи на поворотных трансформаторах (ПТ) приведена на рис. 3.48. В состав дистанционной передачи входят ПТ-датчик, имеющий ротор Р1 и статор С1 и ПТ-приемник, имеющий соответственно ротор Р2 и статор С2. В дистанционных передачах на ПТ часто используют несколько приемников [5].

Рис.3.48. Схема одноканального ДП на поворотных трансформаторах
Д – двигатель; Р – редуктор; У – усилитель.
Дистанционная передача работает следующим образом. При подключении обмотки ротора Р1 ПТ-датчика к сети переменного тока в ней протекает ток, создающий в магнитопроводе датчика магнитный поток Ф1, направление которого совпадает с осью обмотки ротора Р1. Магнитный поток Ф1 наводит в обмотках статора ЭДС, амплитуды которых пропорциональны проекциям магнитного потока Ф1 на оси обмоток статора.
При соединении обмоток статора датчика с обмотками статора приемника, в них появляются токи, которые создают в ПТ-приемнике магнитный поток Ф2, который имеет составляющие Ф2¢ и Ф2 ², направления которых совпадают с направлениями обмоток статора ПТ-приемника. Поток Ф2, равный сумме потоков Ф2¢ и Ф2², наводит в обмотке ротора Р2 ЭДС Ер, которая поступает на вход усилителя У. Усиленный выходной сигнал подается на обмотку управления отрабатывающего двигателя, который через редуктор Р будет поворачивать ротор ПТ-приемника и одновременно отсчетное устройство ОУ индикатора до тех пор, когда величина Ер не станет равной нулю, т.е. до тех пор, пока ось обмотки ротора Р2 ПТ-приемника не станет параллельной оси обмотки ротора Р1 ПТ-датчика.
Двухканальная дистанционная передача на поворотных трансформаторах
Аналогично двухканальным сельсинным дистанционным передачам, двухканальные дистанционные передачи на ПТ применяют для повышения точности. Схема двухканальной дистанционной передачи на ПТ приведена на рис. 3.49.

Рис.3.49. Схема двухканальной ДП на поворотных трансформаторах
Д – двигатель; ПК – переключатель каналов; Р – редуктор.
На ведущем валу В1 устанавливаются роторы Р1Г двухполюсного и Р1Т многополюсного ПТ-датчиков. На валу В2 устанавливаются роторы Р2Г двухполюсного и Р2Т многополюсного ПТ-приемников, выходные сигналы которых ЕРТ и ЕРГ через переключатель каналов ПК поступают в систему отработки информации, построенную аналогично одноканальной передаче.
Система, связывающая двухполюсные ПТ, является каналом грубого отсчета (КГО), система, связывающая многополюсные ПТ, является каналом точного отсчета (КТО).
Характер изменения амплитуд выходных сигналов каналов грубого UГ и точного UT отсчета в зависимости от угла рассогласования , приведен на рис.3.50. Из приведенной зависимости следует, что одному обороту вала датчика В1 соответствует один период изменения выходного сигнала канала грубого отсчета и р (по числу пар полюсов) периодов изменения выходного сигнала канала точного отсчета. Начальные положения каналов грубого и точного отсчета согласовываются с высокой точностью.
При больших углах рассогласования  между датчиком и приемником работает грубый канал, в результате чего угол уменьшается и становится малым (несколько больше статической погрешности канала грубого отсчета). При малых углах рассогласования уменьшающийся выходной сигнал грубого канала достигает определенного порогового уровня UП, при котором срабатывает переключатель каналов ПК, отключая канал грубого отсчета и подключая канал точного отсчета, который работает далее, снижая угол рассогласования.
между датчиком и приемником работает грубый канал, в результате чего угол уменьшается и становится малым (несколько больше статической погрешности канала грубого отсчета). При малых углах рассогласования уменьшающийся выходной сигнал грубого канала достигает определенного порогового уровня UП, при котором срабатывает переключатель каналов ПК, отключая канал грубого отсчета и подключая канал точного отсчета, который работает далее, снижая угол рассогласования.
Двухканальные передачи обладают свойством самосинхронизации лишь при нечетном числе пар полюсов многополюсных поворотных трансформаторов. При четном числе пар полюсов, что является предпочтительным, свойство самосинхронизации нарушается при углах рассогласования близких к 180о, когда выходной сигнал грубого канала становится меньше UП. В этом случае подключается точный канал и приводит вал В2 в положение  , фиксируя это положение как устойчивое, то есть в системе возникает «ложный нуль».
, фиксируя это положение как устойчивое, то есть в системе возникает «ложный нуль».
Для устранения данного явления к выходному напряжению грубого канала добавляют определенное напряжение смещения Uсм постоянной амплитуды и частоты, на которой работает ДП. При этом ротор ПТ-датчика или ПТ-приемника грубого канала разворачивают относительно статора на угол  , называемый начальным угловым смещением.
, называемый начальным угловым смещением.
Статические погрешности двухканальных ДП на поворотных трансформаторах составляют порядка 2 – 5 угловых минут.

Рис.3.50. Зависимости изменения выходных сигналов поворотных трансформаторов-приемников двухканальной ДП
Uсм – напряжение смещения;  – начальный угол смещения.
– начальный угол смещения.
|
|
|

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!