Функциональные элементы приборов летательных аппаратов
В качестве бесконтактных преобразователей перемещения подвижной системы в электрический сигнал в приборах и измерительных системах летательных аппаратов наибольшее применение нашли индукционные, индуктивные и емкостные преобразователи.
Индукционные преобразователи
Индукционные преобразователи часто применяют для преобразования угловых перемещений подвижных систем приборов в электрический сигнал. Такие преобразователи часто называют индукционными датчиками угла (ДУ).
В авиационных приборах нашли применение индукционные ДУ, работающие на принципе дифференциального трансформатора с воздушными зазорами в магнитопроводе и подвижными элементами в виде якоря или рамки, перемещающимися в воздушном зазоре.
В приборах среднего класса точности для питания таких ДУ применяют стандартные переменные токи, получаемые от централизованных источников питания, с частотами равными 400, 500 и 1000 Гц. В прецизионных приборах питание ДУ осуществляют от специальных электронных источников питания с частотами порядка десятков килогерц. При этом для каждой конструктивной разновидности ДУ подбирают оптимальную частоту, при которой недостатки, сопровождающие работу данного преобразователя, (в частности, моменты тяжения) минимальны.
В индукционных ДУ величина тока в сигнальной цепи обусловливает ряд недостатков - моменты обратного воздействия, снижение линейного участка рабочей статической характеристики и др. В связи с этим ток в сигнальной цепи ДУ обычно стремятся сделать минимальным. Для этого увеличивают входное сопротивление предварительного усилителя, являющееся нагрузкой для сигнальной цепи ДУ и имеющее величину порядка десятков кОм. Наличие такого значительного сопротивления нагрузки приводит к работе индукционного ДУ практически в режиме холостого хода.
Основными параметрами, характеризующими качество работы индукционных ДУ являются: чувствительность (крутизна характеристики), диапазон рабочих углов поворота ротора, нулевой сигнал, потребляемая мощность.
Преимуществами индукционных ДУ по сравнению с контактными, например потенциометрическими датчиками являются:
– отсутствие механического контакта подвижной системы с корпусом, а следовательно отсутствие статических погрешностей, обусловленных наличием трения, высокие надежность и долговечность;
– высокие чувствительность и разрешающая способность к перемещениям подвижной системы прибора.
Недостатками индукционных ДУ являются:
– сравнительно небольшой участок статической характеристики, где она имеет линейную зависимость (рабочий участок характеристики);
– невысокий уровень выходного сигнала;
– наличие нулевого сигнала.
Средняя чувствительность индукционных ДУ на рабочем участке характеристики определяется из выражения
|
| 
| (3.13.)
|
где Uвых – величина выходного сигнала;
 – угол поворота ротора.
– угол поворота ротора.
Для индукционных датчиков угла, применяемых в гироскопических приборах, оптимальное значение КДУ составляет 10–20  (3 - 6
(3 - 6  ).
).
Максимальный угол поворота подвижной системы, в пределах которого сохраняется линейная зависимость характеристики, составляет обычно от 0 до нескольких градусов.
Мощность, потребляемая индукционным ДУ с перемещающимся якорем, существенно ниже, так как величины воздушного зазора в магнитоприводе в этом случае примерно на порядок меньше. У большинства индукционных ДУ потребляемая мощность находится в пределах от 10-3 до 10-1 Вт.
Основным преимуществом индукционных ДУ с подвижным якорем является отсутствие токонесущих элементов на подвижной системе прибора и как следствие отсутствие токоподводов к ней. Наличие токоподводов накладывает на подвижную систему дополнительные моменты обратного воздействия в виде моментов сил трения или упругого тяжения.
Однако эти ДУ уступают датчикам угла с подвижными рамками по величине нулевого сигнала и моментам сил электромагнитного тяжения.
Конструктивными разновидностями ДУ с подвижным якорем являются несимметричный трехстержневой ДУ (рис. 3.15.) и симметричные четырех- и шестиполюсные датчики (рис. 3.16.). Трехстержневой несимметричный датчик нашел ограниченное применение из-за своих недостатков, главными из которых являются значительный момент сил электромагнитного тяжения и значительные колебания выходного сигнала, вызванные радиальными перемещениями якоря из-за наличия зазоров в подшипниках подвижной системы прибора. В симметричных датчиках угла с подвижным якорем, имеющих дифференциальную суммирующую схему включения сигнальных обмоток, эти недостатки в значительной степени минимизированы.
Шестиполюсный ДУ представляет собой сдвоенный дифференциальный трансформатор. Статор имеет 6 явно выраженных полюсов, ротор – два полюса. Обмотки возбуждения расположены на 2 и 5 полюсах статора и соединены последовательно. Обмотки, расположенные на 1,3,4,6 полюсах являются сигнальными и соединены по дифференциальной схеме.
Четырехполюсный датчик угла имеет четырехполюсный статор и двухполюсный якорь. На каждом полюсе статора расположены две обмотки, одна из которой является обмоткой возбуждения, другая – сигнальной. Обмотки соединены последовательно таким образом, что мгновенная полярность диаметрально противоположных полюсов, перекрываемых полюсами якоря, противоположна.
Каждый полюс статора является трансформатором с переменным магнитным потоком, изменение которого зависит от взаимного расположения якоря и статора. В начальном положении подвижной системы прибора полюса якоря перекрывают все полюса статора одинаково. При повороте подвижной системы прибора и, следовательно якоря, площадь перекрытия под двумя противоположными полюсами увеличивается, а под двумя другими – уменьшается. Сигнальные обмотки соединены таким образом, что ЭДС, наводимые в обмотках противоположных полюсов, складываются, а соседних – вычитаются.
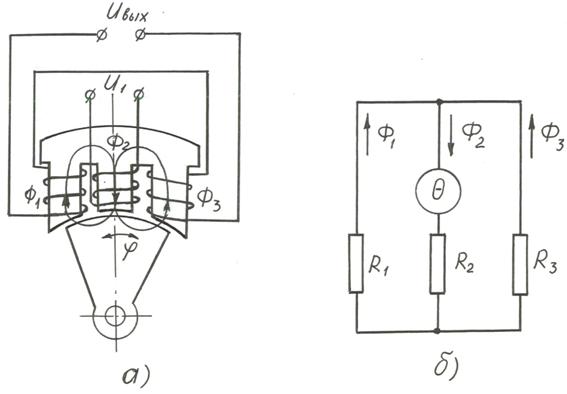
Рис. 3.15. Трехстержневой индукционный датчик угла с подвижным якорем.
а) схема соединений;
б) эквивалентная схема замещения магнитной цепи.
В симметричных ДУ силы электромагнитного тяжения противоположных полюсов направлены в противоположные стороны и при соосном положении якоря и статора компенсируются.
Из-за несимметрии электрической и магнитной цепей индукционных ДУ возникает нулевой сигнал, под которым понимают выходной сигнал ДУ при нулевом угле поворота подвижной системы прибора, причем минимальное значение данного сигнала («электрический нуль») часто не совпадает с нулевым положением якоря относительно полюсов статора («механическим нулем»). Минимального значения нулевого сигнала при начальном положении подвижной системы добиваются регулировкой взаимного положения статора и якоря.
С целью снижения величины нулевого сигнала для изготовления пластин магнитопроводов используют материалы с узкой петлей гистерезиса (специальные магнитомягкие сплавы – пермаллои). Толщина пластин шихтованных магнитопроводов обычно не превышает 0,2 мм, а часто выбирается еще меньше. Шихтованными называют магнитопроводы, изготовленные из набора изолированных другого от друга тонких пластин из магнитомягкого материала.
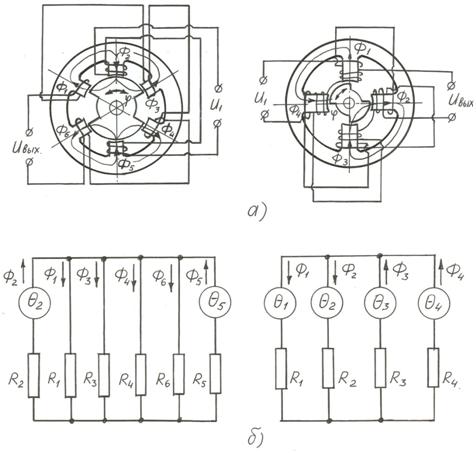
Рис. 3.16. Шестиполюсный и четырехполюсный симметричные индукционные датчики угла с подвижным якорем.
а) схема соединений;
б) эквивалентные схемы замещения магнитной системы.
Неравенство числа рабочих витков в ветвях вторичной обмотки датчика угла, наличие короткозамкнутых витков, межвитковые емкости и другие причины приводят к тому, что фазовый сдвиг напряжения вторичных обмоток не будет равен 180о.
ЭДС, наводимые в сигнальных обмотках ДУ, можно обозначить следующими зависимостями
|
|  
| (3.14.)
|
где  – фазовый сдвиг между Е1 и Е2.
– фазовый сдвиг между Е1 и Е2.
В этом случае выходной сигнал будет равен
|
| 
| (3.15.)
|
Если  , то на выходе появится составляющая сигнала в нулевом положении подвижной системы, равная
, то на выходе появится составляющая сигнала в нулевом положении подвижной системы, равная
|
| 
| (3.16.)
|
Вторая составляющая Uвых представляет собой напряжение основной частоты, сдвинутое по фазе относительно основного сигнала на угол 90о, и называемое квадратурной составляющей нулевого сигнала. Она не может быть устранена путем относительного разворота статора и якоря ДУ. Для ее устранения необходимо осуществлять согласование и симметрирование вторичных обмоток. Оно может быть осуществлено путем подключения к одной из выходных обмоток фазирующего резистора rф (рис. 3.17,а).
Часто компенсация квадратурной составляющей нулевого сигнала осуществляется на входе первого каскада усилителя, к которому подключается ДУ. В этом случае основной сигнал датчика суммируется с компенсационным сигналом Uкомп, формируемым на вторичной обмотке фазовращателя, который представляет собой трансформатор с двумя первичными обмотками и одной вторичной (рис. 3.17,б). Фаза компенсационного сигнала регулируется емкостью С и резистором r1, а амплитуда напряжения – резистором r2.
В состав спектра нулевого сигнала, кроме квадратурной составляющей, входят высшие четные и нечетные гармоники. Наличие высших нечетных гармоник приводит к смещению нуля фазочувствительного усилителя. Четные гармоники не дают постоянной составляющей сигнала, но они вызывают значительный фон и искажают форму полезного сигнала. Для снижения влияния внешних магнитных полей, вызывающих появление четных гармоник, ДУ необходимо экранировать.
Индукционные ДУ с подвижной рамкой также представляют собой дифференциальные трансформаторы с воздушным зазором, вторичные обмотки которых располагаются в воздушном зазоре. Различают две разновидности ДУ с подвижной рамкой: дифференциального по магнитному потоку (рис. 3.18,а) и дифференциального по ЭДС (рис. 3.18,б).
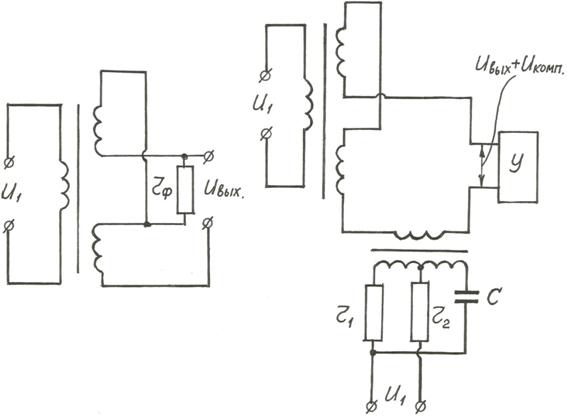
Рис. 3.17.Схема компенсации квадратурной составляющей нулевого сигнала.
а) с помощью фазирующего резистора;
б) суммированием с компенсирующим напряжением на входе усилителя.
При центральном положении сигнальной катушки ЭДС, наводимые в ней левой и правой ветвями магнитного потока Ф, (рис. 3.18,а) будут равны по величине и противоположны по направлению. Результирующий выходной сигнал при этом будет равен нулю.
При смещении сигнальной катушки, например влево, часть потока правого полюса, которая совсем не сцеплялась с витками сигнальной катушки, увеличивается, а часть потока, которая полностью сцеплялась, уменьшается. Следовательно ЭДС, наводимая правой ветвью потока возбуждения, уменьшается, а ЭДС, наводимая левой ветвью потока возбуждения, увеличивается. В результате с сигнальной катушки будет сниматься сигнал в виде напряжения, пропорциональный величине смещения рамки.
Существенным недостатком ДУ с подвижной рамкой, дифференциального по потоку, является влияние на его выходной сигнал внешних переменных магнитных полей, а также большая величина момента обратного воздействия. Значительно меньше подвержен влиянию внешних полей ДУ, дифференциальный по ЭДС, в котором одна и та же ветвь потока возбуждения пронизывает обе сигнальные катушки, находящиеся рядом и включенные последовательно встречно. При отклонении подвижных рамок из центрального положения потокосцепление одной из двух сигнальных обмоток будет больше, чем другой, из-за чего с сигнальной обмотки будет сниматься сигнал в виде напряжения. Кроме того, у такого ДУ компенсируются моменты, обратного воздействия, за счет противоположных направлений токов, протекающих по рамкам.

Рис. 3.18.Принципиальные схемы индукционных датчиков угла с подвижной рамкой
а – ДУ дифференциальный по магнитному потоку;
б – ДУ дифференциальный по ЭДС.
Для снижения погрешностей, вызванных радиальными смещениями рамки, используют два датчика, расположенных диаметрально противоположно. В этом случае их выходные сигналы подаются на усилитель и, суммируясь, взаимно компенсируют погрешности каждого отдельного датчика. Методики расчета трансформаторных ДУ приведены в работе [22].
Основные преимущества ДУ с подвижной рамкой по сравнению с ДУ с подвижным якорем следующие:
– значительно меньшая величина момента обратного воздействия, так как рамка не имеет ферромагнитных масс и не создает электромагнитного момента, а магнитоэлектрический момент из-за малости тока в сигнальной обмотке также мал;
– значительно меньшая величина нулевого сигнала.
Основными недостатками ДУ с подвижной рамкой являются:
– необходимость наличия токоподводов к подвижной системе прибора, а следовательно наличие вредных моментов, создаваемых токоповодами;
– значительная потребляемая мощность из-за большого воздушного зазора.
Общим недостатком индукционных ДУ является сравнительно малый диапазон рабочих углов поворота подвижной системы прибора. Бесконтактными ДУ, имеющими рабочий диапазон углов поворота подвижной системы, равный  , являются поворотные трансформаторы.
, являются поворотные трансформаторы.
Поворотные трансформаторы
Поворотные трансформаторы (вращающиеся трансформаторы) служат для преобразования углов поворота подвижной системы прибора в пределах до в электрический сигнал в виде напряжения, пропорционального углу поворота  или его функциям
или его функциям  и
и  .
.
Поворотный трансформатор (ПТ) имеет две обмотки, одна из которых расположена на статоре, другая на роторе. Принцип действия ПТ иллюстрируется схемой, приведенной на рис. 3.19.
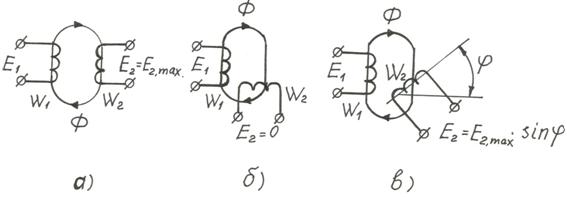
Рис. 3.19. Схема работы поворотного трансформатора.
Наличие ЭДС на первичной обмотке W1, приводит к появлению магнитного потока Ф. Если оси первичной и вторичной обмоток совпадают (ррис. 3.19,а), то во вторичной обмотке, как в обычном трансформаторе индуцируется ЭДС, которая равна
|
| 
| (3.17.)
|
Если обмотки взаимно перпендикулярны (рис. 3.19,б), то Е2=0. Это положение принимается за исходное (нулевое), соответствующее нулевому значению измеряемого угла. При отклонении оси вторичной обмотки от исходного положения на угол  (рис. 3.19,в), коэффициент трансформации будет равен
(рис. 3.19,в), коэффициент трансформации будет равен
|
| 
| (3.18.)
|
Поворотные трансформаторы представляют собой электрические машины переменного тока с неявно выраженными полюсами. Схемы расположения обмоток ротора и статора ПТ и зависимость изменения выходного сигнала двухполюсного ПТ приведены на рис. 3.20 [5].
В авиационных гироскопических приборах и измерительных системах наиболее часто используются плоские ПТ, отношение наружного диаметра к длине у которых больше единицы.
Магнитопроводы статора и ротора ПТ набирают из листов электротехнической стали или пермаллоя. В пазах магнитопроводов расположены обмотки статора и ротора. На статоре и роторе, как правило, размещаются по две обмотки, оси которых взаимно перпендикулярны. Обмотки статора выполняют с одинаковым числом витков; обмотку С1 – С2 иногда называют главной, а обмотку С3 – С4 – квадратурной (вспомогательной).
Обмотки ротора также выполняют одинаковыми, обмотку Р1 – Р2 называют синусной, обмотку Р3 – Р4 – косинусной.
При подключении одной из обмоток статора, например главной С1 – С2, к источнику переменного напряжения  в соответствии с принципом действия трансформатора в обмотках ротора будут наводиться ЭДС. Если ПТ работает в режиме холостого хода, то амплитуды наведенных ЭДС будут пропорциональны соответственно синусу и косинусу угла поворота ротора относительно статора
в соответствии с принципом действия трансформатора в обмотках ротора будут наводиться ЭДС. Если ПТ работает в режиме холостого хода, то амплитуды наведенных ЭДС будут пропорциональны соответственно синусу и косинусу угла поворота ротора относительно статора
|
|  
| (3.19.)
|
где  – коэффициент трансформации.
– коэффициент трансформации.

Рис. 3.20. Схема расположения обмоток (а) и зависимости изменения выходного сиtгнала (б) двухполюсного поворотного трансформатора.
Если обмотки ротора включены на конечную нагрузку, то идеальные зависимости, пропорциональные и искажаются за счет наличия тока в обмотках ротора ПТ.
Для снижения искажений применяют симметрирование ПТ, которое заключается в подборе требуемых значений сопротивлений нагрузки квадратурной обмотки статора и косинусной обмотки ротора.
Поворотные трансформатора, у которых при повороте ротора на 360о выходной сигнал изменяется в пределах одного периода, называют двухполюсными. Кроме двухполюсных, для повышения точности передачи угла применяют многополюсные ПТ.
Некоторые технические характеристики серийно выпускаемых ПТ приведены в таблице 3.5.
Таблица 3.5. Технические характеристики поворотных трансформаторов
| Тип ПТ
| СКТ-212-1
| СКТ2-250
| ДБСКТ-220-1
| СКТ-220-1
| ТБСКТ-632-1Ш
ТБСКТ-632-1
|
| Напряжение питания, В
|
|
|
|
|
|
| Частота, Гц
|
|
|
|
|
|
| Коэффициент передачи
| 0,56
| 0,22
| 0,65
| 0,22-0,56
| 0,65
|
| Угловая погрешность, мин
|
|
| 12,5
|
|
|
| Температура окружающей среды, оС
| -60 – +100
| -60 – +100
| -60 – +250
| -60 – +100
| -60 – +215
|
| Наружный диаметр, мм
|
|
|
|
|
|
| Высота, мм
|
|
|
|
|
|
| Масса, г
|
|
|
|
|
|
Индуктивные датчики перемещения
Индуктивные датчики перемещения (ДП) нашли широкое применение для преобразования линейных и угловых перемещений подвижных систем измерительных устройств в электрический сигнал.
Индуктивный преобразователь представляет собой одну или несколько катушек с железным сердечником и якорем, отделенным от сердечника воздушным зазором. При перемещении якоря, связанного с подвижной системой измерительного устройства, изменяется площадь перекрытия или величина воздушного зазора, что приводит к изменению индуктивности катушек (катушки); при этом пропорционально перемещению якоря изменяется величина тока, протекающего по катушке.
В приборах ЛА наиболее часто используют дифференциальные индуктивные ДП, обмотки которых включают в мостовые измерительные схемы (рис. 3.21.). Величина воздушного зазора выбирается в пределах (0,2 – 1) мм на сторону и должна быть примерно в два раза больше максимального перемещения якоря. Частота питающего напряжения выбирается в пределах (400 – 1000) Гц в приборах средней точности, в приборах высокой точности частота питающего напряжения составляет до нескольких десятков килогерц.
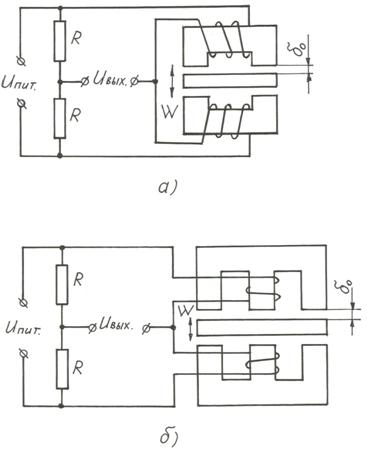
Рис. 3.21. Схемы включения индуктивных датчиков с перемещающимися сердечниками.
При перемещении якоря от нейтрального положения в датчиках, схемы которых приведены на рис. 3.21., величина индуктивности L1 одной катушки уменьшается на  , а другой катушки
, а другой катушки  увеличивается, то есть
увеличивается, то есть
|
|  
| (3.20.)
|
При использовании дифференциальных схем включения индуктивных ДП возрастает их чувствительность, а также взаимно компенсируются силы электромагнитного тяжения, что снижает реактивный момент, действующий на якорь и следовательно, на подвижную систему прибора.
При изменении величины индуктивности катушек на в диагонали мостовой схемы появляется сигнал в виде напряжения, равный
|
| 
| (3.21.)
|
где  – частота питающего переменного напряжения;
– частота питающего переменного напряжения;
U – величина напряжения питания;
 – коэффициент, учитывающий влияние выпучивания силовых линий;
– коэффициент, учитывающий влияние выпучивания силовых линий;
R – величина активного сопротивления катушки датчика.
Средняя чувствительность датчика в диапазоне рабочих перемещений якоря может быть определена из уравнения
|
| 
| (3.22.)
|
где  – величина перемещения якоря.
– величина перемещения якоря.
На рис. 3.22. приведена схема датчика угловых перемещений. В центральном (нулевом) положении ротора (якоря) индуктивные сопротивления  плеч моста датчика равны между собой, и выходной сигнал, снимаемый с диагонали моста, равен нулю. По повороте якоря на угол сопротивление воздушных зазоров под полюсами изменится, в результате чего на выходе мостовой схемы появляется сигнал в виде напряжения, пропорциональный углу поворота якоря
плеч моста датчика равны между собой, и выходной сигнал, снимаемый с диагонали моста, равен нулю. По повороте якоря на угол сопротивление воздушных зазоров под полюсами изменится, в результате чего на выходе мостовой схемы появляется сигнал в виде напряжения, пропорциональный углу поворота якоря
|
| 
| (3.23.)
|
где  – коэффициент, учитывающий выпучивание силовых линий
– коэффициент, учитывающий выпучивание силовых линий 
 – ширина полюса статора;
– ширина полюса статора;
r – радиус полюса якоря;
R – омическое сопротивление катушки;
 – добавочное сопротивление, вызванное потерями на гистерезис и вихревые токи;
– добавочное сопротивление, вызванное потерями на гистерезис и вихревые токи;
 – величина индуктивности под полюсом
– величина индуктивности под полюсом 
где 
 – магнитная проводимость воздушного зазора под полюсом статора при центральном (нулевом) положении якоря.
– магнитная проводимость воздушного зазора под полюсом статора при центральном (нулевом) положении якоря.
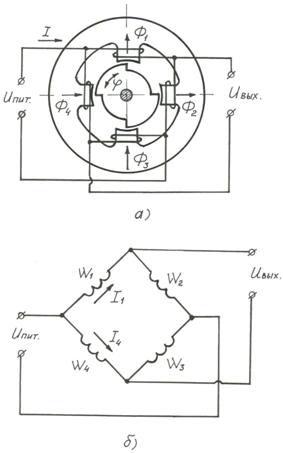
Рис. 3.22. Схема индуктивного датчика угловых перемещений
а – принципиальная схема;
б – электрическая схема.
Емкостные датчики перемещений
В настоящее время в прецизионных гироскопических приборах и акселерометрах широко применяются емкостные датчики перемещения, представляющие собой конденсаторы переменной емкости.
Формула, связывающая емкость простого плоского конденсатора, имеет вид
|
| 
| (3.24.)
|
где  – диэлектрическая постоянная межэлектродного промежутка конденсатора;
– диэлектрическая постоянная межэлектродного промежутка конденсатора;
S – площадь электродов конденсатора;
 – расстояние между электродами.
– расстояние между электродами.
Из выражения (3.24.) следует, что емкостной датчик перемещения можно реализовать, используя изменение всех параметров, входящих в данную зависимость. В емкостных датчиках перемещения, применяемых в гироскопических приборах и акселерометрах летательных аппаратов, используют изменение активной площади S электродов или расстояния между ними в результате движения подвижной системы прибора.
На рис. 3.23. приведена принципиальная схема датчика угла прецизионного маятникового кварцевого акселерометра.
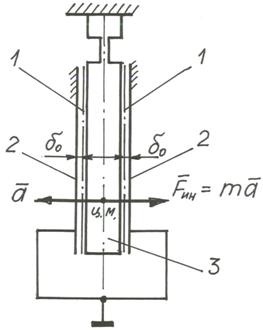
Рис. 3.23. Принципиальная схема емкостного датчика угла 1, 2 – обкладки конденсатора; 3 – чувствительный элемент (маятник);  – зазор между электродами конденсаторов.
– зазор между электродами конденсаторов.
Чувствительным элементом прибора является маятник 3, представляющий собой пластину, изготовленную из кварца, на которой нанесены металлизированные участки 1, являющиеся обкладками (электродами) емкостного датчика угла. Другими электродами емкостного ДУ являются металлические поверхности корпуса прибора 2.
При наличии линейного ускорения  , под действием инерционной силы
, под действием инерционной силы  происходит отклонение чувствительного элемента, при этом изменяются зазоры
происходит отклонение чувствительного элемента, при этом изменяются зазоры  между обкладками конденсаторов, и с ДУ снимается сигнал, пропорциональный разности зазоров
между обкладками конденсаторов, и с ДУ снимается сигнал, пропорциональный разности зазоров  . Этот сигнал поступает на вход фазочувствительного усилителя, где он усиливается и преобразуется в постоянный ток I, величина и направление которого определяется величиной и фазой сигнала, формируемого емкостным датчиком угла. Номинальная величина зазоров
. Этот сигнал поступает на вход фазочувствительного усилителя, где он усиливается и преобразуется в постоянный ток I, величина и направление которого определяется величиной и фазой сигнала, формируемого емкостным датчиком угла. Номинальная величина зазоров  составляет 0,02 мм, максимальная величина перемещения чувствительного элемента равна 0,01 мм, максимальный выходной сигнал с ДУ составляет 15 мВ. ДУ питается переменным током напряжением 5 В частотой 54 кГц.
составляет 0,02 мм, максимальная величина перемещения чувствительного элемента равна 0,01 мм, максимальный выходной сигнал с ДУ составляет 15 мВ. ДУ питается переменным током напряжением 5 В частотой 54 кГц.
Измерительная схема рассмотренного ДУ приведена на рис. 3.24. Здесь выделены следующие участки: I – собственно датчик угла; II – цепи сопряжения ДУ с предварительным усилителем и цепи питания измерительной схемы; III – предварительный усилитель; IV – выходные цепи предварительного усилителя.
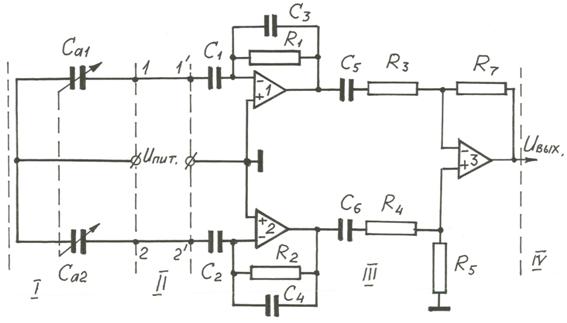
Рис. 3.24. Схема формирования выходного сигнала с емкостного ДУ
I – датчик угла; II – цепи сопряжения ДУ с предварительным усилителем и цепи питания измерительной схемы; III – предварительный усилитель; IV – выходные цепи предварительного усилителя.
Предварительный усилитель имеет два симметричных входа, включающих операционные усилители 1 и 2, имеющие одинаковые коэффициенты передачи и подключенные к суммирующему операционному усилителю 3. Делитель R4; R5 служит для выравнивания коэффициентов усиления каналов предварительного усилителя по входам 1 и 2.
Выходной сигнал с емкостного ДУ формируется на основе зависимостей емкости плоского конденсатора (3.25.) и реактивного сопротивления емкости (3.26.).
|
| 
| (3.25.)
|
где  =1 – диэлектрическая проницаемость для вакуума;
=1 – диэлектрическая проницаемость для вакуума;
 – электрическая постоянная;
– электрическая постоянная;
S – площадь обкладок конденсатора;
– расстояние между обкладками конденсатора.
|
| 
| (3.26.)
|
где f – частота переменного тока;
С – величина емкости.
Сопротивление цепи обратной связи операционного усилителя 1 (рис. 3.24.) определяется из уравнения
|
| 
| (3.27.)
|
а коэффициент передачи по каналу 1 – из уравнения
|
| 
| (3.28.)
|
Соответственно сопротивление цепи обратной связи операционного усилителя 2 с учетом подключения конденсатора  и коэффициент передачи по каналу 2 находятся по формулам
и коэффициент передачи по каналу 2 находятся по формулам
|
| 
| (3.29.)
|
|
| 
| (3.30.)
|
Номиналы элементов измерительной схемы целесообразно выбрать таким образом, чтобы 
В этом случае  и при равенстве емкостей конденсаторов ДУ
и при равенстве емкостей конденсаторов ДУ  выходной сигнал с датчика
выходной сигнал с датчика  .
.
Если выполняются соотношения
 и равенство
и равенство
|
| 
| (3.31.)
|
то при  выходной сигнал с ДУ может быть определен по следующей зависимости
выходной сигнал с ДУ может быть определен по следующей зависимости
|
| 
| (3.32.)
|
Особенности конструирования бесконтактных преобразователей перемещения в электрический сигнал
Основными элементами большинства рассмотренных в данном разделе преобразователей перемещения в электрический сигнал являются узлы магнитопроводов и обмоток.
Как уже указывалось выше, для снижения потерь магнитопроводы индукционных и индуктивных преобразователей выполняются шихтованными, то есть состоящими из отдельных тонких изолированных друг от друга пластин, изготовленных из технической стали или специальных магнитомягких материалов – пермаллоев и набранных в пакеты.
Для повышения стабильности магнитных потоков пластины магнитопроводов должны собираться в пакеты согласованно по структуре материала, получаемого в процессе прокатки ленты, из которой на штампах вырубаются сами пластины. С этой целью в конструкции пластин магнитопроводов предусматривают специальные элементы, которые позволяют ориентировать пластины друг относительно друга при их сборке в пакеты строго определенным образом. Пример выполнения такого элемента показан на рис. 3.25,а [9].
Магнитопроводы чрезвычайно чувствительны к механическим напряжениям, возникающим в материале пластин при креплении пакетов к корпусу прибора или якоря на оси его подвижной системы. Поэтому в прецизионных приборах пакеты магнитопроводов ДУ часто устанавливают в специальную металлическую обойму, а эту сборку закрепляют на корпусе прибора с помощью винтовых соединений. Пример такой конструкции представлен на рис. 3.25.

Рис. 3.25. Конструкция многополюсного индукционного датчика угла с подвижным якорем
а – вид якоря с элементом для ориентации пластин;
б – конструкция датчика угла:
1 – обойма для сборки статора магнитопровода; 2 – гайка для закрепления статора магнитопровода; 3 – заливка катушки компаундом; 4 – магнитный экран.
При регулировке величины «нулевого сигнала» необходимо перемещать магнитопровод статора ДУ относительно корпуса прибора. С этой целью в конструкции должны быть предусмотрены элементы, позволяющие осуществлять эту регулировку. Отверстия для крепления магнитопровода к корпусу прибора должны располагаться в стороне от прохождения рабочего магнитного потока по магнитопроводу.
В индукционных и индуктивных преобразователях с подвижным якорем обмотки возбуждения и сигнальные обмотки наматываются на каркасы катушек, которые закрепляются на магнитопроводах с помощью клея. После закрепления катушек на элементах магнитопровода для повышения жесткости и улучшения теплоотвода они часто заливаются компаундными массами (компаундами), после чего подвергаются окончательной механической обработке. После регулировки «нулевого сигнала» для повышения помехозащищенности ДУ на поверхности, образованные компаундом с помощью клея устанавливают магнитные экраны из пермаллоя. Пример выполнения подобной конструкции многополюсного ДУ с подвижным якорем показан на рис 3.25.
Узлы сигнальных обмоток, выполненных в виде плоских катушек (рамок) индукционных ДУ с подвижными обмотками изготовляют часто заливкой их компаундами. Полученные при этом жесткие элементы конструкции или непосредственно, или с помощью промежуточных деталей закрепляют на подвижных системах приборов винтовыми соединениями, обеспечивая возможность выставки их «нулевых сигналов» в процессе регулировки прибора.
3.3. Магнитоэлектрические преобразовательные устройства и их элементы
Магнитоэлектрические преобразовательные устройства (преобразователи) применяются для преобразования постоянного электрического тока в силу или момент. В измерительных устройствах их используют для решения следующих основных задач:
– в качестве измерительных приборов – гальванометров и логометров;
– в качестве силовых элементов, создающих противодействующие силы и моменты, воздействующие на подвижную систему прибора.
Основными элементами магнитоэлектрических преобразователей являются магнитные системы, состоящие из постоянных магнитов и магнитопроводов, и обмотки, по которым протекает электрический ток. Постоянные магниты являются источниками постоянного магнитного потока, который замыкается с помощью магнитопровода, создавая замкнутую магнитную систему, необходимую для работы магнитоэлектрического преобразователя. Принцип действия магнитоэлектрических преобразователей основан на законе Ампера. В соответствии с законом Ампера на проводник, по которому протекает постоянный электрический ток, если проводник помещен в магнитное поле постоянного магнита, будет действовать сила, направление которой определяется правилом левой руки.
Постоянные магниты представляют собой предварительно намагниченные тела из магнитотвердого материала, поэтому одним из основных требований к магнитам является обеспечение ими магнитного потока, стабильного во времени, при изменении условий окружающей среды и при наличии внешних возмущений.
Основные характеристики постоянных магнитов
При внесении во внешнее магнитное поле полностью размагниченного образца, изготовленного из магнитотвердого материала, и повышении напряженности внешнего магнитного поля намагниченность образца будет изменяться в соответствии с кривой намагничивания до момента достижения состояния насыщения, при этом образец будет иметь величину магнитной индукции, равную Bs (индукцию насыщения) (рис. 3.26.).
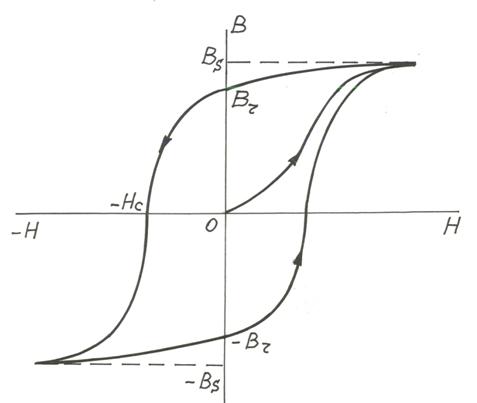
Рис. 3.26. Вид петли магнитного гистерезиса.
При уменьшении напряженности внешнего магнитного поля до нуля образец будет иметь остаточную индукцию Br. Для полного размагничивания такого образца его нужно поместить во внешнее магнитное поле противоположной полярност<





