Безопасного полета
Оценка БзП при воздействии на ЛА факторов, вероятность появления которых зависит от времени полета, может быть проведена на основе представления переходов системы от одного состояния к другому под воздействием опасных факторов моделью марковского процесса со счетным множеством состояний и непрерывным временем. Факторы при этом могут быть как зависимые, так и независимые, однократно возникающие и многократно повторяющиеся, с зависимыми и независимыми последствиями, то есть такая модель позволяет получить оценку БзП с учетом воздействия на ЛА обширного класса опасных факторов. Допустим, что все возможные в полете особые ситуации, вызванные опасными факторами, образуют счетное множество  . В зависимости от успешности действий экипажа по парированию последствий опасных факторов множеству
. В зависимости от успешности действий экипажа по парированию последствий опасных факторов множеству  будут соответствовать два подмножества:
будут соответствовать два подмножества:  – благополучных исходов и
– благополучных исходов и  – неблагополучных исходов полета.
– неблагополучных исходов полета.
Обозначим вероятности этих исходов соответственно  . Так как события из множества для текущего момента времени полета являются несовместным, то на основании теоремы сложения вероятностей можно записать
. Так как события из множества для текущего момента времени полета являются несовместным, то на основании теоремы сложения вероятностей можно записать
 ,
,
где  – вероятность пребывания системы в нормальном состоянии.
– вероятность пребывания системы в нормальном состоянии.
Неизвестные вероятности ,  ,
,  вычисляются по модели марковского процесса смены состояний рассматриваемой системы.
вычисляются по модели марковского процесса смены состояний рассматриваемой системы.
Для обоснования возможности применения такой модели используются следующие допущения:
1. События парирования или непарирования возникают одновременно с появлением опасных факторов, вызывающих особую ситуацию.
2. Последовательность возникновения особых ситуаций i -го типа является простейшим потоком с интенсивностью  . Соответствующие ему потоки благополучных и неблагополучных исходов в силу принятого допущения также являются простейшими. Их интенсивности соответственно равны
. Соответствующие ему потоки благополучных и неблагополучных исходов в силу принятого допущения также являются простейшими. Их интенсивности соответственно равны  ,
,  .
.
3. Отказавшие в полете элементы не восстанавливаются, а ошибки операторов не повторяются.
Напомним, что в силу ранее принятого допущения (см. п. 1.4) ситуация в начале полета является нормальной, то есть опасные факторы отсутствуют. Для расчета вероятностей  , , марковский процесс со всеми выявленными и реально возможными в полете состояниями системы представляется наглядно в виде графа состояний (рис. 1.8). В узлах этого графа обозначаются состояния системы (исходы полета); вершина графа (состояние 0) соответствует нормальной ситуации. Состояния системы, в которые она переходит непосредственно из нулевого состояния вследствие появления опасных факторов,
, , марковский процесс со всеми выявленными и реально возможными в полете состояниями системы представляется наглядно в виде графа состояний (рис. 1.8). В узлах этого графа обозначаются состояния системы (исходы полета); вершина графа (состояние 0) соответствует нормальной ситуации. Состояния системы, в которые она переходит непосредственно из нулевого состояния вследствие появления опасных факторов, 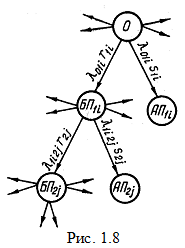 называются состояниями первого уровня, а состояния, возникающие из состояний первого уровня, – состояниями второго уровня и т. д.
называются состояниями первого уровня, а состояния, возникающие из состояний первого уровня, – состояниями второго уровня и т. д.
Обозначим эти состояния: на первом уровне по i -му фактору –  ,
,  – соответственно для благополучных и неблагополучных исходов; на втором уровне по j -му фактору –
– соответственно для благополучных и неблагополучных исходов; на втором уровне по j -му фактору –  ,
,  и т.д. На стрелках графа проставляются интенсивности перехода от одного состояния к другому: при переходе от нулевого состояния к состояниям первого уровня –
и т.д. На стрелках графа проставляются интенсивности перехода от одного состояния к другому: при переходе от нулевого состояния к состояниям первого уровня –  ;
;  ; при переходе от состояний первого уровня к состояниям второго уровня –
; при переходе от состояний первого уровня к состояниям второго уровня –  и т.д.
и т.д.
Дифференциальные уравнения для определения неизвестных вероятностей состояний составляют по определенному правилу:
число уравнений равно числу состояний (исходов), размеченных на графе;
в левой части уравнения стоит производная вероятности данного состояния, а правая часть содержит столько членов, сколько стрелок связано с данным состоянием;
если стрелка выходит из этого состояния, то соответствующий член уравнения имеет знак «минус», если она направлена в состояние – «плюс»;
каждый член уравнения равен произведению интенсивности перехода, соответствующей данной стрелке, на вероятность того состояния, из которого стрелка исходит.
Для краткости обозначим суммарные интенсивности исходов из соответствующих состояний 0, 1 i, 2 j через
 . (1.32)
. (1.32)
В (1.32)  – числа факторов, которые могут вывести систему соответственно из нулевого состояния, из i -го состояния первого уровня, из j -го состояния второго уровня. Соотношения (1.32) учитывают, что
– числа факторов, которые могут вывести систему соответственно из нулевого состояния, из i -го состояния первого уровня, из j -го состояния второго уровня. Соотношения (1.32) учитывают, что  .
.
Воспользовавшись указанным выше правилом, составим дифференциальные уравнения для вероятностей состояний, соответствующих графу на рис. 1.7:
 ; (1.33)
; (1.33)
 ; (1.34)
; (1.34)
 ; (1.35)
; (1.35)
 ; (1.36)
; (1.36)
 . (1.37)
. (1.37)
Система дифференциальных уравнений (1.33) – (1.37) решается при следующих начальных условиях:
 ,
,  ,
,  .
.
В первую очередь решается уравнение для вероятности нулевого состояния; затем, используя этот результат, производится решение уравнений для вероятностей состояний первого уровня и т.д. Для оценки безопасности полета достаточно решить только уравнения для вероятностей благополучных исходов, но для проверки правильности решения по условию  необходимо решать всю систему дифференциальных уравнений.
необходимо решать всю систему дифференциальных уравнений.
Оценка БзП с учетом состояний только первого уровня. Сложность графа состояний и число возможных уровней состояний, которые необходимо учитывать при оценке безопасности полета, определяются характером рассматриваемой задачи. В частности, для состояний, связанных с отказами резервированных систем, граф состояний должен иметь как минимум два–три уровня.
Наибольшее влияние на уровень БзП оказывают состояния первого уровня, так как они вызваны появлением в полете одного опасного фактора, в то время как состояния второго уровня обусловлены последовательным появлением двух факторов, третьего уровня – трех и т.д. Соответственно и вероятности состояний от уровня к уровню убывают, поэтому в ряде случаев граф состояний можно ограничить первым уровнем. Это равносильно допущению о том, что за рассматриваемое время полета более одного опасного фактора не возникает. Неизвестные вероятности состояний  ,
,  ,
,  при этом определяются из решения уравнений (1.33) – (1.35) при условии
при этом определяются из решения уравнений (1.33) – (1.35) при условии  (в дальнейшем индексы 0 и 1 при решении уравнений можно опустить).
(в дальнейшем индексы 0 и 1 при решении уравнений можно опустить).
Решая эти уравнения, получим
 ;
;
 .
.
На основании этих решений выражения для вероятностей благополучного и неблагополучного исходов полета примут вид:
 ; (1.38)
; (1.38)
 . (1.39)
. (1.39)

Как следует из выражения (1.39), удельный вклад i -го фактора в уровень аварийности равен:
 .
.
По этому критерию можно определить факторы, оказывающие наиболее отрицательное влияние на БзП. Как частный случай для одного опасного фактора (n = 1) показатели БзП принимают вид:
 ; (1.40)
; (1.40)
 . (1.41)
. (1.41)
Видно, что выражения (1.40) и (1.41) идентичны соответственно выражениям (1.13) и (1.14).
Оценка БзП с учетом этапности выполнения полета. С учетом этапности полета при решении дифференциальных уравнений (1.33) – (1.37) нужно учитывать следующее:
1. Каждый s -й из z этапов полета занимает определенную продолжительность по времени. За начало отсчета времени каждого этапа полета будем принимать 0, а за конец t. При этом  , где
, где  ,
,  – текущее время полета, отсчитываемое от начала полета до конца предыдущего этапа и конца исследуемого этапа.
– текущее время полета, отсчитываемое от начала полета до конца предыдущего этапа и конца исследуемого этапа.
2. Начальные условия при решении дифференциальных уравнений, описывающих марковский процесс смены состояний на рассматриваемом s -м этапе, являются вероятностями соответствующих состояний в конце предыдущего  -го этапа полета.
-го этапа полета.
Ограничивая граф состояний состояниями первого уровня, запишем дифференциальные уравнения относительно неизвестных вероятностей состояний для s -го этапа полета:
 ; (1.42)
; (1.42)
 ; (1.43)
; (1.43)
 . (1.44)
. (1.44)
Решение системы уравнений (1.42) – (1.44) при начальных условиях ;  ;
;  ;
;  имеет вид:
имеет вид:
 ; (1.45)
; (1.45)
 ; (1.46)
; (1.46)
 . (1.47)
. (1.47)
Показатели безопасности для s -го этапа на основании (1.45) – (1.47) запишутся в виде
 ; (1.48)
; (1.48)
 . (1.49)
. (1.49)
В целом для полета
 ; (1.50)
; (1.50)
 . (1.51)
. (1.51)
Условие нормировки  выполняется.
выполняется.
Пример. Рассчитать зависимость  по этапам полета с учетом отказов функциональной системы непрерывного действия по марковской модели. Исходные данные имеют гипотетический характер и представлены в табл. 1.2.
по этапам полета с учетом отказов функциональной системы непрерывного действия по марковской модели. Исходные данные имеют гипотетический характер и представлены в табл. 1.2.
Т а б л и ц а 1.2
| №
| № п/п этапа
|
|
|
|
|
|
| отк.
| l,ч
| t эт,ч
| 0,06
| 0,07
| 1,16
| 0,08
| 0,13
|
|
| 0,010
| s
| 0,019
| 0,015
| 0,009
| 0,020
| 0,035
|
|
| 0,001
| 0,075
| 0,060
| 0,004
| 0,070
| 0,057
|
|
| 0,015
| 0,011
| 0,009
| 0,006
| 0,015
| 0,023
|
|
| 0,023
| 0,009
| 0,007
| 0,005
| 0,001
| 0,033
|
|
| 0,015
| 0,013
| 0,011
| 0,007
| 0,019
| 0,015
|
|
| 0,037
| 0,015
| 0,009
| 0,0025
| 0,0078
| 0,019
|

Как показывают проведенные исследования, при расчетах показателей безопасности полетов в большинстве случаев достаточно учесть возможность последовательного появления в полете только двух опасных факторов в любых их комбинациях. Расчетные соотношения для показателей БзП при ограничении графа состояний двумя уровнями читатель при соответствующих навыках решения дифференциальных уравнений (1.33) – (1.37) может получить самостоятельно. Для сравнения расчеты в данном примере выполнены с учетом двух возможных отказов функциональной системы и одного отказа.
Анализ результатов расчета , представленных на рис. 1.9, показывает:
от этапа к этапу разница в значениях , полученных с учетом двух отказов и одного отказа, возрастает;
на отдельном непродолжительном (порядка 0,5 ч) участке полета при расчете достаточно ограничиться учетом только одного отказа (в общем случае – опасного фактора), относительная разница с учетом двух и одного отказов не превышает при этом 5%.

В заключение этого параграфа отметим, что в нем была рассмотрена методика расчета показателей безопасности полета на основе представления смены состояний системы в полете однородным марковским процессом, то есть когда  . Если интенсивность переходов
. Если интенсивность переходов  – функция времени, то есть
– функция времени, то есть  , то марковский процесс является неоднородным и описывается системой дифференциальных уравнений с переменными коэффициентами. В остальном же методика расчета показателей безопасности полета остается прежней.
, то марковский процесс является неоднородным и описывается системой дифференциальных уравнений с переменными коэффициентами. В остальном же методика расчета показателей безопасности полета остается прежней.
Задачи,






