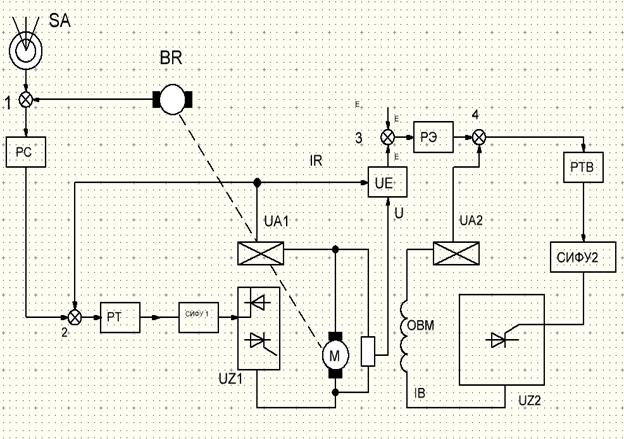
Схема регулирования ТП-Д
Рис. 1.1. Функциональная схема двухконтурного подчинённого регулирования по системе ТП-Д
В настоящее время наиболее распространенными являются системы управления электроприводом, построенные по принципу подчиненного регулирования. Они обладают большим быстродействием, выполнены на базе унифицированных элементов, что облегчает их проектирование и монтаж. Хотя в наши дни существуют системы управления, обеспечивающие лучшие показатели, системы подчиненного управления все еще актуальны.
Принципы подчиненного управления позволяют соединить систему управления с объектом независимо от того, используется ли в нем система ТП-Д, Г-Д либо иной управляемый преобразователь.
Современные унифицированные системы автоматического управления электроприводом строят по принципу подчиненного регулирования параметров.
Достоинство системы подчиненного управления в возможности ограничения величины подчиненного параметра путем ограничения выходного сигнала регулятора внешнего контура.
В курсовой работе необходимо:
- описать приведённую выше функциональную схему регулирования ТП-Д (см. рис.1.1).
- указать, как реализован данный АЭП с ДПТ НВ, и кратко охарактеризовать каждый элемент контура.
- определить, как происходит регулирование скорости двигателя (позонно).
Выбор ДПТ НВ
По заданным значениям моментов и времени (приложение 1) и с учетом изменения нагрузки, показанной на диаграмме (приложение 3) построить временную диаграмму моментов для заданного механизма. Определить, какие моменты на данной диаграмме являются неизменяющимися за соответствующие промежутки времени, а какие меняют свое значение. Для внесения заданных элементов в курсовой проект создать таблицу и рисунок, используя данные приложений 1 и 3.
Определить продолжительность включения по формуле 1.1 и по результату указать режим работы.
ПВ=  ; (1.1)
; (1.1)
Определить эквивалентный момент по формуле 1.2.
Мэкв=  Н*м; (1.2)
Н*м; (1.2)
где Mi - момент в определенный промежуток времени,  ;
;
ti - продолжительность данного промежутка времени, сек.;
Σtраб - суммарное время работы двигателя, сек.;
Σtnауз - суммарное время пауз в работе, сек.
 - коэффициент, учитывающий продолжительность включения двигателя.
- коэффициент, учитывающий продолжительность включения двигателя.
Коэффициент нужно выбрать из таблицы 1.1.
Таблица 1.1
| ПВ
|
|
|
|
|
|
|
| 0,2
| 0,4
| 0,6
| 0,8
| 0,9
|
Найти необходимую эквивалентную мощность в Вт, исходя из значений эквивалентного момента и заданной скорости вращения якоря nзад, по формуле 1.3.
 , Вт (1.3)
, Вт (1.3)
Искомую номинальную мощность двигателя в кВт принять, с учётом коэффициентов запаса, равной (формула 1.4):
Pном=(1,1 - 1,3)∙PЭ, кВт (1.4)
Определить способ соединения ОЯ и ОВ и отобразить его графически.
По справочнику (ссылка на источник информации обязательна) выбрать электродвигатель постоянного тока и обозначить его основные технические характеристики (тип, номинальную мощность PH, кВт, номинальную скорость вращения nном, об/мин, максимальную скорость вращения nmax, об/мин; сопротивление обмотки якоря Ra, A и обмотки возбуждения Rв, А; номинальный ток двигателя Iном, А; напряжение U,В, КПД, %,).
Алгоритм выбора двигателя:
1. Выбрать двигатель независимого соединения;
2. По определенному (формула 1.4) диапазону мощностей выбрать тип двигателя;
3. Проверить выбранный двигатель по напряжению – если не совпадает, то продолжать выбор;
4. Проверить выбранный двигатель по номинальной скорости – если расхождение с заданной скоростью велико, то продолжать выбор;
5. Выбранный двигатель, в итоге, должен соответствовать всем трём параметрам: диапазону мощности, величине напряжения и заданной скорости.
6. Охарактеризовать выбранный тип электродвигателя.
После выбора двигателя и определения всех его номинальных данных необходимо построить естественную механическую характеристику выбранного двигателя (прямая 1 на рис.1.2).
Так как она прямолинейна, то для её построения достаточно найти две точки с координатами {Мном; nном} и {Мmin; nmax}, используя формулы 1.5 – 1.8.
 сек-1 (1.5)
сек-1 (1.5)
 Нм (1.6)
Нм (1.6)
 сек-1 (1.7)
сек-1 (1.7)
 Нм (1.8)
Нм (1.8)
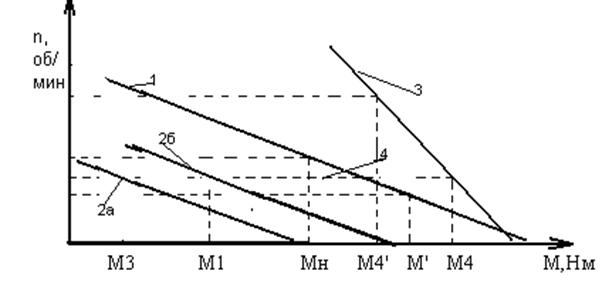
Рис.1.2 Естественная и искусственные механические характеристики ДПТ
Для определения требуемой зонности регулирования необходимо провести прямую, соответствующую заданной скорости вращения вала двигателя (прямая 4 на рис.1.2), и отметить на ней заданные в условии моменты.
Затем необходимо выбрать и обосновать способы регулирования скорости вращения вала двигателя.
 В первой зоне регулирования, характеристики, при уменьшении напряжения на якоре, сохраняют свою жесткость, т.к. согласно формуле 1.9 скорость холостого хода n0 при этом снижается, а приращение скорости
В первой зоне регулирования, характеристики, при уменьшении напряжения на якоре, сохраняют свою жесткость, т.к. согласно формуле 1.9 скорость холостого хода n0 при этом снижается, а приращение скорости  n остаётся неизменным.
n остаётся неизменным.
n= n0 - n, об/мин
или
 , об/мин (1.9)
, об/мин (1.9)
где: Ua,B – напряжение на якоре; с – безразмерный конструктивный коэффициент; Ф, Веб – суммарный магнитный поток машины; ΣRa, Ом – суммарное сопротивление цепи якоря; М2, Нм – момент на валу.
Следовательно, для построения искусственных характеристик в этом случае достаточно через требуемые точки провести прямые, параллельные естественной (прямые 2а и 2б на рис. 1.2).
Во второй зоне регулирование осуществляется за счет ослабления магнитного потока, создаваемого обмоткой возбуждения. Т.к. согласно формуле 1.9 и скорость холостого хода n0, и приращение скорости n при этом увеличиваются, то жёсткость искусственных характеристик падает. Характеристики прямолинейны, но не параллельны естественной характеристике.
Для построения искусственной характеристики во второй зоне (прямая 3 на рис.1.2), учитывая, что при таком способе регулирования P=const, вначале нужно определить его значение по формуле 1.10, используя соответствующие координаты.
 , Вт (1.10)
, Вт (1.10)
Затем, задавая произвольное, но близкое к нулю, значение момента, найти еще одну точку с координатами {  }, рассчитав значение скорости по формуле 1.11.
}, рассчитав значение скорости по формуле 1.11.
 , об/мин (1.11)
, об/мин (1.11)