

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...
Топ:
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Интересное:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ИРКУТСКИЙ ЭНЕРГЕТИЧЕСКИЙ КОЛЛЕДЖ
Техническая механика
Методические указания
по выполнению практических работ
для студентов Иркутского энергетического колледжа, обучающихся по специальностям:
140206 Электрические станции, сети и системы
140203 Релейная защита и автоматизации электроэнергетических систем
140101 Тепловые электрические станции
140102 Теплоснабжение и теплотехническое оборудование
Составила: Семенюк Л.А.
Рецензент:
.
Рассмотрено на заседании ЦК
Протокол №____от_________2007 г.
Председатель ЦК
_________________Сухтерева Р.И.
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ИРКУТСКИЙ ЭНЕРГЕТИЧЕСКИЙ КОЛЛЕДЖ
Л.А.Семенюк

Методические указания по выполнению практических работ
для студентов Иркутского энергетического колледжа, обучающихся по специальностям:
140206 Электрические станции, сети и системы
140203 Релейная защита и автоматизации электроэнергетических систем
140101 Тепловые электрические станции
140102 Теплоснабжение и теплотехническое оборудование
 |
Иркутск 2007
Содержание
определение перемещений.......................................................................................................23
|
|
прочности и жесткости при кручении.....................................................................................
Приложение А. Пределы прочности некоторых материалов …………………………………..…..31
Приложение Б Образец оформления титульного листа......................................................................32
Перечень рекомендуемой литературы ………………………………………….................................33
Общие методические указания
«Техническая механика» как учебная дисциплина состоит из «Теоретической механики», «Сопротивления материалов» и «Деталей машин». Основой изучения технической механики является теоретической механика, в которой изучаются общие законы механического движения тел и общие свойства этих движений.
Равновесие является частным случаем механического движения. Его изучением занимается статика. В основе статики положены немногочисленные законы и теории, которые находят разнообразное применение. Наиболее эффективным путём изучения статики является не формальное заучивание законов статики, а активное изучение методов решения тех или иных типов практических задач.
Методика решения таких задач рассматривается в настоящих методических заданиях.
Методические указания содержат теоретическое обоснование, многовариантные задания, последовательность и примеры выполнения работ. Теоретические сведения даются в конспективной форме и должны быть дополнительно изучены на занятиях или по одному из учебных пособий.
Основная часть расчетно-графических работ выполняется на практических занятиях, остальная выдаётся для самостоятельной работы в качестве домашних заданий. Многовариантные задания приводятся в конце каждой работы. Номер варианта соответствует списочному номеру в учёбном журнале. По выполненным работам студентами выполняются отчёты. Отчёты должны иметь титульный лист. Образцы отчёта находятся в кабинете технической механики. Решение должно сопровождаться необходимыми объяснениями. Решение приводится сначала в буквенном виде, затем подставляются численные значения. Все вычисления должны выполняться в международной системе СИ.
|
|
Методические указания могут быть использованы студентами заочной формы обучения для самостоятельного изучения, закрепления знания и выполнения контрольных работ.
Практическая работа № 1
Задания
Заданы модули сил F1, F2, F3, пересекающихся в одной точке, и направление этих сил – углы α1, α2, α3 относительно оси Х (рис. 1.1 и табл. 1.1).
Цель работы – произвести графическое и аналитическое исследование плоской системы сходящихся сил, выявить уравновешена ли заданная система сил.
Теоретическое обоснование
Исследование любой системы сил начинают с определения взаимного расположения сил. Если линии действия всех сил расположены в одной плоскости и пересекаются в одной точке, то они образуют плоскую систему сходящихся сил.
Силы, действующие на абсолютно твёрдое тело, допускаются переносить вдоль линии их действия, поэтому сходящиеся силы можно всегда приложить в точке пересечения их линий действия. Последовательно складывая сходящиеся силы, плоскую систему сходящихся сил приводят к одной равнодействующей.
Один из главных вопросов при исследовании системы сил – является ли данная система сил уравновешенной или неуравновешенной. Необходимым и достаточным условием уравновешенности системы сходящихся сил является равенство нулю их равнодействующей силы. Материальная точка, к которой приложена уравновешенная система сил, находится в состоянии покоя или прямолинейного равномерного движения.
Сложение сил можно произвести двумя способами: графически и аналитически. Графическое сложение плоской системы сходящихся сил производят построением силового многоугольника (рис. 1.2).


Рис. 1.1 Рис.1.2
Для этого из произвольной точки откладывается вектор силы F1, из конца которого откладывается вектор силы F2 и т.д. Равнодействующая сила является замыкающей стороной силового многоугольника. Графический способ позволяет довольно быстро и очень наглядно произвести сложения сил, но точность определения модуля и направления равнодействующей зависит от точности построений.
|
|
Более точные результаты можно получить, применяя аналитический способ, оснований на вычислении всех заданных сил на оси Х и Y:
Fix = Fi* cosαi, Fiy = Fi *sinαi, i = 1… n, (1.1)
где Fi – модули заданных сил,
α – угол между силой F; и осью х.
Затем определяются проекции равнодействующей:
F∑ x = ∑Fix, F∑y= ∑Fiy, (1.2)
а по ним – модуль равнодействующей:
F∑ =  (1.3)
(1.3)
и направление:
α = arctg  (1.4)
(1.4)
Порядок выполнения работы
1.Для заданной системы сходящихся сил в соответствии с вариантом построить в масштабе силовой многоугольник. Записать выбранный масштаб сил. Измерить линейкой длину вектора равнодействующей и транспортиром угол между равнодействующей и осью х. Учитывая масштаб построения, вычислить модуль равнодействующей силы.
2.Вычислить модуль и направление равнодействующей аналитическим методом проекций.
3.Определить относительные погрешности вычисления модуля и направления равнодействующей. При расхождении более 10% вычисления и построения следует проверить.
4.Сделать вывод об уравновешенности заданной системы сил.
5.Ответить на контрольные вопросы.
Контрольные вопросы
1.Как производится графическое сложение сил, приложенных к твёрдому телу в одной точке? Влияет ли порядок сложения векторов при построении силового многоугольника на величину равнодействующей?
2.Каково направление равнодействующей силы в силовом многоугольнике?
3.Можно ли построив силовой многоугольник, сделав вывод об уравновешенности заданной системы?
4.Как определяется проекция силы на ось? В каком случае она равна нулю?
5.Каково аналитическое условие равновесия плоской системы сходящихся сил?
6.В каких случаях следует графический способ определения равнодействующей, а в каких – аналитический?
7.Как можно произвести уравновешивание плоской системы сходящихся сил?
|
|
Пример выполнения
Задание:
F1 = 4 Н, α = 90  , F2 = 6Н, α2 = 200 , F3 = 3H, α3 = 70
, F2 = 6Н, α2 = 200 , F3 = 3H, α3 = 70
1. Графическое определение равнодействующей.
Выбираем масштаб сил – μF = 0.1 Н/ мм

Модуль равнодействующей -  = μF * 1 = 0.1*68 = 6.8,
= μF * 1 = 0.1*68 = 6.8,
Направление равнодействующей -  = 134°
= 134°
2. Аналитическое определение равнодействующей проекции заданных сил на оси х и у:
F1x = F1* cosα1= 4*cos 90° = 0; F1y = F1* sin α1 = 4* sin90° = 4 H
F2x = F2 * cosα2 = 6* cos 200° = -5.638 H; F2y = F2 * sin α2 = 6* sin 200° = - 1.368 H
F3x = F3* cosα3 = 3* cos 70° = 1.026 H; F3y = F3* sin α3 = 3*sin 70° = 2.819 H
Проекции равнодействующей:
F∑x = ∑Fix = 0 -5.638 + 1.026 = - 4.612 H,
F∑y =∑Fiy = 4 – 1.368 + 2.819 = 5.451 H,
Модуль равнодействующей: F∑  =
= 
 = 7.140 H
= 7.140 H
Направление равнодействующей: α  = arctg
= arctg 
3. Относительные погрешности
Погрешность вычисления модуля равнодействующей.
 * 100% =
* 100% =  * 100% = 5,00%
* 100% = 5,00%
Погрешность вычисления направления равнодействующей
 *100% =
*100% =  *100% = 2,81%
*100% = 2,81%
Вывод: система является неуравновешенной.
Модуль равнодействующей - F∑  = 7.140 Н, направление -
= 7.140 Н, направление -  = 130,23°.
= 130,23°.
Относительные погрешности не превышают 5%
Литература: 
Таблица 1.1
| № варианта | Заданные силы, Н | Углы между силой и осью х, град | ||||
| F1 | F2 | F3 | α1 | α2 | α3 | |
Практическая работа № 2
Задание
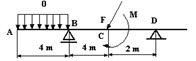
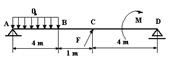
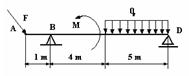
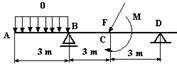
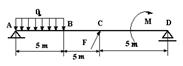
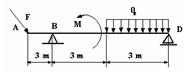
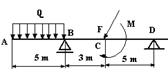
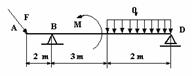
Задана горизонтальная двух опорная балка. Балка нагружена активными силами: сосредоточенной F, распределенной силой интенсивностью q и парой сил с моментом М (табл.2.1 и рис 2.6).
Цель работы – построить расчётную схему балки, составить уравнения равновесия балки, определить реакции ее опор и выявить наиболее нагруженную опору.
Теоретическое обоснование
Во многих машинах и сооружениях встречаются конструктивные элементы, предназначенные преимущественно для восприятия нагрузок, направленных перпендикулярно их оси. Расчетные схемы таких элементов (валы, части металлоконструкции и др.) могут быть представлены балкой. Балки имеют опорные устройства для передачи усилий и сопряжения с другими элементами.
|
|
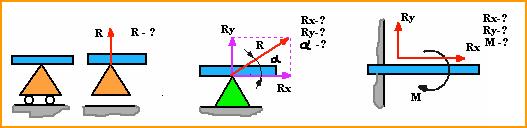
Основными типами опор балок являются шарнирно – подвижная, шарнирно – неподвижная опоры и жесткая заделка.
Шарнирно – подвижная опора (рис.2.1,а) допускает поворот балки вокруг оси шарнира и линейное перемещение на незначительное расстояние параллельно опорной плоскости. Точкой приложения опорной реакции является центр шарнира. Направление реакции R – перпендикуляр к опорной поверхности.
Шарнирно – неподвижная опора (рис.2.1,6) допускает только поворот балки вокруг оси шарнира. Точкой приложения являются также центр шарнира. Направления реакции здесь неизвестно, оно зависит от нагрузки, приложенной к балке. Поэтому для такой опоры определяются две неизвестные – взаимно перпендикулярные составляющие Rx и Ry опорной реакции.
Жесткая заделка (защемление) (рис.2.1,в) не допускает ни линейных перемещений, ни поворота. Неизвестными в данном случае являются не только величина, но и её точка приложения. Таким образом, для определения опорной реакции необходимо найти три неизвестные: составляющие Rx и Ry по осям координат и реактивный момент MR относительно центра тяжести опорного сечения балки.
А б в
Рис.2.1
Равновесие балки под действием любой системы заданных сил, расположенных в одной плоскости, может быть обеспечено одной жёсткой заделкой или двумя опорами – подвижной и неподвижной. Балки называются соответственно консольными (рис.2.2,а) или двух опорными (рис.2.2,б)

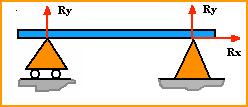
А б
Рис.2.2
На балку действуют заданные силы и пары сил. Силы по способу приложения делятся на распределенные и сосредоточенные. Распределенные нагрузки задаются интенсивно q, Н/м и длиной 1, м. равномерно распределенные нагрузки условно изображаются в виде прямоугольника, в котором параллельные стрелки указывают, в какую сторону действует нагрузка (рис.2.3). В задачах статики равномерно – распределенную нагрузку можно заменять равнодействующей сосредоточенной силой Q, численно равной произведению q*1, приложенной посредине длины и направленной в сторону действия q.
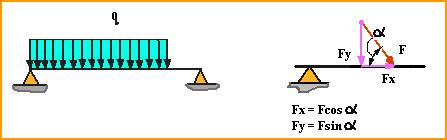
Рис.2.3 Рис. 2.4
Сосредоточенные нагрузки приложены на сравнительно небольшой длине, поэтому считается, что они приложены в точке. Если сосредоточенная сила приложена под углом к балке, то для определения реакции опор удобно разложить её на две составляющие – Fx = Fcos α и Fy =F sin α (рис.2.4).
Реакции опор балки определяются из условий равновесия плоской системы произвольно расположенных сил. Для плоской системы можно составить три независимых условия равновесия:
∑Fix = 0; ∑Fiy = 0; ∑Mio = 0 или
∑Мia = 0; ∑MiB = 0; ∑MiC = 0 или  } (2.1)
} (2.1)
∑MiA = 0; ∑MiB = 0; ∑Fix = 0.
Где О, А,В, С – центры моментов.
Рационально выбрать такие уравнения равновесия, в каждое из которых входила бы по одной неизвестной реакции.
Порядок выполнения работы
1. В соответствии с заданием изобразить балку и действующие заданные силы.
Выбрать расположение координатных осей: совместить ось х с балкой, а ось у направить перпендикулярно оси х.
1. Произвести необходимые преобразования: силу, наклоненную к оси балки под углом а, заменить двумя взаимно перпендикулярными составляющими, а равномерно распределенную нагрузку – её равнодействующей.
2. Освободить балку от опор, заменив их действие реакциями опор, направленными вдоль осей координат.
3. Составить уравнения равновесия балки, чтобы решением каждого из трёх уравнений было определение одной из неизвестных реакций опор.
4. Проверить правильность определения реакций опор по уравнению, которое не было использовано для решения задач.
5. Сделать вывод о наиболее нагруженной опоре.
6. Ответить на контрольные вопросы.
Контрольные вопросы
1.Сколько независимых уравнений равновесия можно составить для плоской системы параллельных сил?
2.Какие составляющие реакции опор балок возникают в шарнирно – подвижной, шарнирно – неподвижной опорах и жёсткой заделке?
3.Какую точку целесообразно выбрать в качестве центра момента при определении реакций опор?
4.Какая система является статически неопределимой?
Пример выполнения
1.Задание:
q = 5 H/м, F = 25 H, M = 2 H*м, α = 60°
2.Преобразование заданных сил:
Fx = F cos α = 25cos 60° = 12.500H, Fy = F sinα = 25 sin60° = 21.625H
Q = q*1 = 5*6 =30 H.
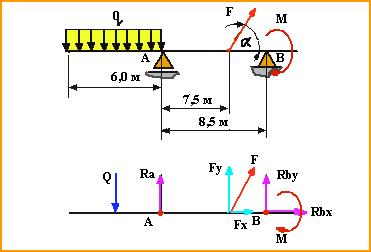 Рис.2.5
Рис.2.5
3.Составим расчётную схему (рис.2.5)
4.Уравнения равновесия и определение реакций опор:
а) ∑Mia = 0; -Q *3 – Fy*7.5+ RB* 8.5 – M = 0;
RB = 
б) ∑MiB =0: - RAy*8.5 + Q *5.5 + Fy *1 – M = 0:
RAy = 
в) ∑Fix=0: RAx + Fx =0: RAx= - Fx = - 12.500H.
5.Проверка:
∑Fiy = 0; RAy = Q – Fy + RB = 0; 21.724 – 30 – 21.651 + 29.927 = 0; 0 = 0
Вывод:
Наиболее нагруженной является опора В – RB =29.927 Н. Нагрузка на опору А – RA = 
Литература: 
Таблица 2.1
| № варианта | № схемы на рис. 2.6 | q, Н/м | F, Н | М, Н  м м
|  , град , град
|
| 4,5 | |||||
| 2,5 | |||||
| 4,5 | |||||
| 3,5 | |||||
| 6,5 | |||||
| 1,5 | |||||
| 0,5 | |||||
Рис.2.6
|
|
|
|
|
|
|

|
|

|
Практическая работа № 3
Задание
Движение груза А задано уравнением y = at  + bt + c, где [y] = м, [t] = c.
+ bt + c, где [y] = м, [t] = c.
Цель работы – подставив заданные коэффициенты в общее уравнение движения, определить вид движения. Определить скорость и ускорение груза в моменты времени t  и t
и t  , а также скорость и ускорение точки В на ободе барабана лебедки (рис.3.3 и табл.3.1).
, а также скорость и ускорение точки В на ободе барабана лебедки (рис.3.3 и табл.3.1).
Теоретическое обоснование
Точки тела движутся по окружностям вокруг неподвижной оси (ось вращения).
Закон равномерного вращательного движения: φ = φ  + wt. (3.1)
+ wt. (3.1)
Закон равнопеременного вращательного движения: φ = φ + w t +  (3.2)
(3.2)
Закон неравномерного вращательного движения: φ = f(t  ).
).
Здесь φ – угол поворота тела за время t, рад;
w – угловая скорость, рад/с;
φ - угол поворота, на который развернулось тело до начала отсчета;
w - начальная угловая скорость;
ε - угловое ускорение, рад/с
Угловая скорость: w =  ; w = w + εt; (3.3)
; w = w + εt; (3.3)
Угловое ускорение: ε =  .
.
Кинематические графики вращательного движения представлены на рис. 3.1а, б.

А б
Рис.3.1
Число оборотов вращения тела: z = φ(2π).
Угловая скорость вращения: n, об/мин.
w =  (3.4)
(3.4)
 Рис.3.2
Рис.3.2
Параметры движения точки вращающегося тела (рис.3.2):
v – линейная скорость точки В
v = wr, м/с; (3.5)
a  - касательное ускорение точки В
- касательное ускорение точки В
a = εr, м/с (3.6)
а  - нормальное ускорение точки В
- нормальное ускорение точки В
а = w r, м/с (3.7)
Порядок выполнения работы
1. Определить вид движения, подставив заданные коэффициенты в общее уравнение движения.
2. Определить уравнения скорости и ускорения груза.
3. Определить полное число оборотов шкива.
4. Определить нормальное и касательное ускорения точки на ободе шкива в указанные моменты времени.
5. Ответить на контрольные вопросы.
Контрольные вопросы
1. В чем заключается принцип кинетостатики?
2. Могут ли при поступательном движении тела траектории его точек не прямыми линиями?
3. Равна ли скорость перемещения груза скоростям точек на ободе вращающегося шкива?
4. Как повлияет на скорость груза увеличение диаметра шкива при неизменной угловой скорости?
5. Какое ускорение (касательное или нормальное) характерно для точек вращающегося тела?
Пример выполнения
Для перемещения груза применена барабанная лебедка, привод которой состоит из электродвигателя 1 и редуктора 2 (понижает угловую скорость вала двигателя до требуемой на барабане). Барабан 3 служит для преобразования вращательного движения в поступательное движение груза. Диаметр барабана d = 0,2 м, а уравнение его вращения φ = 30t + 6t . Для момента времени t = 0,5 с, определить все кинематические характеристики движения барабана, точки на его ободе, а также груза. Направление движения груза – вверх.

1. Определяем кинематические характеристики движения барабана. Угол поворота барабана за время t φ1 = 30*0,5 + 6*0,5 = 16,5 рад.
Угловая скорость барабана w = = (30t + 6t )´ = 30 + 12t ≠ const – движение неравномерное. При t = 0,5 с получим w = 30 + 12*0,5 = 36 рад/с
Угловое ускорение барабана ε = = (30 + 12t)´ = 12 рад/с = const. Так как ускорение положительно и постоянно, то барабан вращается равноускоренно.
2. Кинематические характеристики движения любой точки на ободе барабана, например точки
А, определяются через угловые характеристики движения барабана.
Для момента времени t получим: расстояние, пройденное точкой s = φ r = 16,5 *0,1 = 1,65 м
Скорость точки v = w *r = 36*0,1 = 3,6 м/с; касательное ускорение a = εr = 12*0,1 = 1,2 м/с ; нормальное ускорение а = w r = 36 *0,1 = 130 м/с .
3. Кинематические характеристики груза равны соответствующим характеристикам любой точки тягового троса, а значит, и точки А, лежащей на ободе барабана.
Литература:
Таблица 3.1
| Вариант | Параметр | |||||
| а, м/с .
| в, м/с | с, м | r, м | t , м
| t , м
| |
| 0,2 | ||||||
| 0,4 | ||||||
| 0,6 | ||||||
| 0,8 | ||||||
| 0,5 | ||||||
| 0,4 | ||||||
| 0,3 | ||||||
| 0,2 | ||||||
| 0,8 | ||||||
| 0,6 | ||||||
| 0,2 | ||||||
| 0,4 | ||||||
| 0,6 | ||||||
| 0,8 | ||||||
| 0,5 | ||||||
| 0,4 | ||||||
| 0,3 | ||||||
| 0,2 | ||||||
| 0,8 | ||||||
| 0,6 | ||||||
| 0,2 | ||||||
| 0,4 | ||||||
| 0,6 | ||||||
| 0,8 | ||||||
| 0,5 | ||||||
| 0,4 | ||||||
| 0,3 | ||||||
| 0,2 | ||||||
| 0,8 | ||||||
| 0,6 |
 Рис. 3.3
Рис. 3.3
Практическая работа № 4
Задания
Скорость кабины лифта массой m изменяется согласно графикам (рис.4.4). Используя принцип Даламбера определить натяжение каната кабины лифта на каждом участке движения. Определить максимальное натяжение каната. По максимальному натяжению каната определить максимальную потребную мощность для подъема груза. По заданной величине КПД механизма определить максимальную мощность двигателя (табл. 4.1).
Цель работы – научиться рассчитывать мощность с учетом потерь на трение и сил инерции,определять параметры движения с помощью теорем динамики
Теоретическое обоснование
Принципом Даламбера называют метод, позволяющий решать задачи динамики приемами статики.Для характеристики действия силы на некотором перемещении точки ее приложения вводят понятие «работа силы». Работа служит мерой действия силы, работа – скалярная величина.
Работа постоянной силы. Работа постоянной по модулю и направлению силы при прямолинейном перемещении определяется скалярным произведением вектора силы на вектор перемещения точки ее приложения.
A = F S cos ( ) = F S cosα (4.1)
) = F S cosα (4.1)
Работа силы трения: AFтр = Fтр S cos ( ) = fтр NS cos180 = - fтрNS (4.2)
) = fтр NS cos180 = - fтрNS (4.2)
Работа силы, приложенной к вращающемуся твердому телу: А =  = A = Mz φ. (4.3)
= A = Mz φ. (4.3)
Для характеристики работоспособности и быстроты совершения работы введено понятие мощности
Мощность при поступательном движении
P=Fυ cos α (4.4)
где F- постоянная сила, H; υ – скорость движения, м/с; α- угол между направлениями силы и перемещения.
Мощность при вращение
P=Mω, (4.5)
где М – вращающий момент, Н*м; ω – угловая скорость, рад/с.
Коэффициент полезного действия
КПД=Рпол/Рзатр (4.6)
где Рпол – полезная мощность, Вт; Рзатр – затраченная мощность, Вт.
Сила инерции
F = - ma (4.7)
где а – ускорение точки, м/с; m – масса, кг.
Основные уравнения динамики
Поступательное движение твёрдого тела: F = ma/
Вращательное движение твёрдого тела: Mz = τε
где Mz - суммарный момент внешних сил относительно оси вращения, кг*м;
ε – угловое ускорение, рад/с.
Порядок выполнения работы
1. Используя принцип Даламбера определить натяжение каната кабины лифта на каждом участке движения.
2. Определить максимальное натяжение каната.
3. По максимальному натяжению каната определить максимальную потребную мощность для подъема груза.
4. По заданной величине КПД механизма определить максимальную мощность двигателя.
5. Ответить на контрольные вопросы.
Контрольные вопросы
Пример выполнения
График изменения скорости лифта при подъеме известен (рис.4.1). Масса лифта с грузом
2800 кг. Определить натяжение каната, на котором подвешен лифт на всех участках подъема.
Решение



Где Т – натяжение каната;
G – сила тяжести;
F  - сила инерции, растягивающая канат.
- сила инерции, растягивающая канат.
Для определения ускорения на участке 1 учтем, что движение на этом участке равнопеременное, скорость 

Следовательно, ускорение:
Определяем усилие натяжения каната при под
|
|
|

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!