

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Топ:
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Билет 1) Кинематика материальной точки. Основные характеристики: перемещение, скорость, ускорение. Равномерное и равноускоренное движение - уравнения и графики
Механика - область физики, изучающая движение материальных тел и взаимодействие между ними.
Кинема́тика — раздел механики, изучающий математическое описание движения тел без рассмотрения причин движения.
Материальная точка – любое тело, размерами окторого при данных условиях можно пренебречь.
Абсолютно твердое тело – тело, деформациями которого при данных условиях можно пренебречь.
Механическое движение – изменение положения тел в пространстве относительно других тел с течением времени.
Система отсчёта — это совокупность тела отсчета, связанной с ним системы координат и системы отсчёта времени, по отношению к которым рассматривается движение тел.
Перемещение - векторная физическая величина, характеризующая изменение положения материальной точки относительно выбранной системы отсчёта. Вектор перемещения соединяет начальное положение точки с конечным.
Траектория – линия, вдоль которой движется тело.
Путь – длина траектории.
Скорость – векторная физическая величина, характеризующая быстроту движения и направление движения материальной точки в пространстве относительно выбранной системы отсчёта.
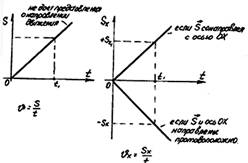
Скорость бывает средней по перемещению и средней путевой. Средняя по перемещению – мгновенная, это вектор (производная пути по времени); а средняя путевая – отношение пройденного пути ко времени, за которое этот путь пройден.
Ускорение – векторная физическая величина, характеризующая изменение скорости за единицу времени.
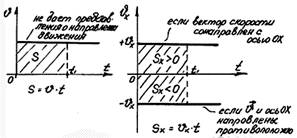
Равноме́рное движе́ние — механическое движение, при котором тело за любые равные отрезки времени совершает одинаковые перемещения. Равномерное движение материальной точки — это движение, при котором скорость точки остаётся неизменной. Перемещение, пройденное точкой за время  , задаётся в этом случае формулой
, задаётся в этом случае формулой  .
.
|
|
Если направить координатную ось вдоль прямой, по которой движется точка, то зависимость координаты  точки от времени является линейной:
точки от времени является линейной:
 ,
,
где  — начальная координата точки,
— начальная координата точки,  — проекция вектора скорости на координатную ось
— проекция вектора скорости на координатную ось
. 
Равноускоренное прямолинейное движение — это движение, при котором скорость тела за любые равные промежутки времени изменяется одинаково, т. е. это движение с постоянным по модулю и направлению ускорением.
При равноускоренном движении по прямой скорость тела определяется формулой:

Зная, что  , найдём формулу для определения координаты x:
, найдём формулу для определения координаты x:



Билет 2) Криволинейное движение. Нормальное (центростремительное) и тангенциальное (касательное) ускорение. Угловая скорость и угловое ускорение, их связь с линейной скоростью и ускорением. Радиус кривизны таректории.
Криволинейное движение – это движение, траектория которого представляет собой кривую линию (например, окружность, эллипс, гиперболу, параболу). Примером криволинейного движения является движение планет, конца стрелки часов по циферблату и т.д. В общем случае скорость при криволинейном движении изменяется по величине и по направлению.
Криволинейное движение материальной точки считается равномерным движением, если модуль скорости постоянен (например, равномерное движение по окружности), и равноускоренным, если модуль и направление скорости изменяется (например, движение тела, брошенного под углом к горизонту).
Нормальное ускорение(центростремительное) - величина, характеризующая быстроту изменения направления вектора скорости.
Тангенциальное ускорение – величина характеризующая быстроту изменения модуля скорости материальное точки.
|
|
Радиус кривизны – радиус окружности R, по которой движется тело.
Определения
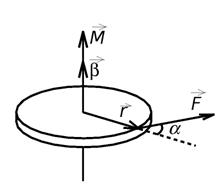
Момент силы — векторная физическая величина, равная векторному произведению радиус-вектора, (проведенного от оси вращения к точке приложения силы — по определению), на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Моме́нт и́мпульса - векторная физическая величина, равная векторному произведению радиус-вектора на импульс. Характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение.
Момент инерции — скалярная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
МАЯТНИК ОБЕРБЕКА
Цель работы – изучение основного закона динамики вращательного движения, определение момента инерции системы грузов.
Приборы и принадлежности: лабораторный модуль ЛКМ-3 со стойкой и блоком, стержень с отверстиями, два круглых груза, груз наборный, нить длиной 55 см с крючком (синяя), измерительная система ИСМ-1 (секундомер), пластиковый фиксатор.
Краткая теория
 Основной закон динамики вращательного движения твердого тела относительно неподвижной оси
Основной закон динамики вращательного движения твердого тела относительно неподвижной оси
 (1)
(1)
связывает кинематическую характеристику движения – угловое ускорение  с динамическими характеристиками – моментом силы
с динамическими характеристиками – моментом силы  и моментом инерции I (рис. 1).
и моментом инерции I (рис. 1).
Угловое ускорение характеризует изменение угловой скорости Рис. 1. Момент M силы F
во времени и направлено, как и момент силы, вдоль оси вращения.  (2).
(2).
Угловое ускорение связано с касательной составляющей линейного ускорения а τточки вращающегося тела соотношением
 , (3)
, (3)
где r –- кратчайшее расстояние от этой точки до оси вращения.
Моментом силы в общем случае называют векторную величину
 , (4)
, (4)
где  – сила, лежащая в плоскости, перпендикулярной оси вращения;
– сила, лежащая в плоскости, перпендикулярной оси вращения;  – вектор, соединяющий точку на оси c точкой приложения силы.
– вектор, соединяющий точку на оси c точкой приложения силы.
В уравнении (1) – сумма составляющих моментов сил вдоль направления оси вращения.
|
|
Момент инерции I характеризует распределение массы в твердом теле относительно оси вращения и является мерой инертности вращающегося тела. Момент инерции равен сумме произведений элементарных масс Δ mi, на которые мысленно разбито тело, на квадрат их расстояний до оси вращения
I =ΣΔ mi ri. (5)
Выражая Δ mi через плотность тела: Δ mi = ρ Δ Vi,где Δ Vi – элементарный объем тела, и переходя к пределу при Δ Vi → 0, получим
 (6)
(6)
Формула (6) позволяет теоретически найти момент инерции любого тела. Например, момент инерции тонкого однородного стержня длиной l и массой т относительно оси, проходящей перпендикулярно стержню через его центр,
I = т l 2 / 12.
Теорема Штейнера устанавливает связь между моментом инерции Iс твердого тела относительно оси, проходящей через центр инерции, и моментом инерции относительно другой оси, параллельной первой
I = Iс + та2 , (7)
где а – расстояние между осями, т – масса тела.
В настоящей работе экспериментально находится момент инерции маятника Обербека (рис.2). Он состоит из блока радиусом R, который может вращаться вокруг неподвижной горизонтальной оси. К блоку прикреплены симметрично относительнооси стержни, на каждом из которых могут свободно перемещаться грузы массами m 1, что дает возможность изменять момент инерции маятника. Грузы m 1 устанавливаются на одинаковом расстоянии от оси, так что центр инерции всей вращающейся части маятника находится на оси вращения.
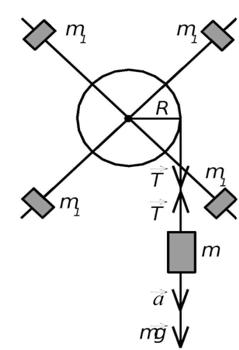
К концу нити прикреплен груз массой m. Из закона динамики вращательного движения следует
 . (8)
. (8)
Момент силы М, создающийся силой натяжения нити, исходя из (4)
 , (9)
, (9)
где α – угол между вектором  и отрезком R на рис. 2, равный 90°; sin α= 1.
и отрезком R на рис. 2, равный 90°; sin α= 1.
Запишем второй закон Ньютона для поступательного движения груза m в проекции на направление ускорения а,
 . (10)
. (10)
рис. 2. Маятник Обербека
В этой формуле сила натяжения нити T, действующая на груз, по модулю равна силе натяжения нити, действующей на блок в формуле (9) (поэтому они обозначены одинаково). Это справедливо, если массой нити можно пренебречь по сравнению с массой груза т.
Из (9) и (10) получим
|
|
 . (11)
. (11)
 Тангенциальное (касательное) ускорение точек участков нити, намотанной на блок, и точек на ободе блока равны, если нет проскальзывания нити по блоку, и равны ускорению груза m, если нить нерастяжима.
Тангенциальное (касательное) ускорение точек участков нити, намотанной на блок, и точек на ободе блока равны, если нет проскальзывания нити по блоку, и равны ускорению груза m, если нить нерастяжима.
Тогда из (3) следует, (12)
 (13)
(13)
Подставляя (11)и(12)в (8), получим
 Из этой формулы следует, что ускорение (а) не зависит от времени, так как все остальные величины в этом уравнении постоянны, значит, движение маятника будет равноускоренным и при нулевой начальной скорости.
Из этой формулы следует, что ускорение (а) не зависит от времени, так как все остальные величины в этом уравнении постоянны, значит, движение маятника будет равноускоренным и при нулевой начальной скорости.
(14)
где h – путь, пройденный грузом т за время t.
В данной работе измеряется время одного полного оборота блока, и за это время груз массой m пройдет путь
h =2π R. (15)
Подставив (14) и (15) в (13), получим формулу для вычисления момента инерции маятника
(16)
Момент инерции маятника Обербека будет изменяться при изменении расстояния r от оси вращения маятника до центров грузов массами m 1, перемещаемых вдоль стержней.
Согласно теореме Штейнера (7)
 , (17)
, (17)
где Ic – момент инерции всей вращающейся части маятника при условии, что центры грузов m 1находились бы на оси вращения.
Из (17) следует, что зависимость  от
от  – линейная. В рассмотренной теории движения маятника Обербека не учитывались силы трения в подшипниках оси блока и сопротивление воздуха. Пренебрежение действием этих сил является главной причиной систематической погрешности измерения момента инерции.
– линейная. В рассмотренной теории движения маятника Обербека не учитывались силы трения в подшипниках оси блока и сопротивление воздуха. Пренебрежение действием этих сил является главной причиной систематической погрешности измерения момента инерции.
Гармонические колебания
Гармонические колебания — это колебания, при которых координата (смещение) тела изменяется со временем по закону косинуса или синуса и описывается формулами:
x=A⋅sin(ω⋅t+φ0) (1) или x=A⋅cos(ω⋅t+φ0). (2)
Зависимость координаты от времени x(t) называется кинематическим законом гармонического колебания (законом движения).
Графически зависимость смещения колеблющейся точки от времени изображается косинусоидой (или синусоидой).
В этих формулах ω – частота колебания, А – амплитуда колебания, φ0 – начальная фаза колебания. Приведенные формулы отличаются определением начальной фазы и при φ0(1) = φ0 (2) +π/2 полностью совпадают.
Это простейший вид периодических колебаний. Конкретный вид функции (синус или косинус) зависит от способа выведения системы из положения равновесия. Если выведение происходит толчком (сообщается кинетическая энергия), то при t=0 смещение х=0, следовательно, удобнее пользоваться функцией sin, положив φ0’=0; при отклонении от положения равновесия (сообщается потенциальная энергия) при t=0 смещение х=хm, следовательно, удобнее пользоваться функцией cos и φ0=0.
Выражение, стоящее под знаком cos или sin, наз. фазой колебания:. (ω⋅t+φ0)= φ
Фаза колебания измеряется в радианах и определяет значение смещения (колеблющейся величины) в данный момент времени.
|
|
Амплитуда колебания зависит только от начального отклонения (начальной энергии, сообщенной колебательной системе).
ФИЗИЧЕСКИЙ МАЯТНИК
Цель работы – изучение физического маятника, определение ускорения свободного падения.
Приборы и принадлежности: лабораторный модуль ЛКМ-3 со стойкой и блоком, стержень с отверстиями, измерительная система ИСМ-1 (секундомер), пластиковый фиксатор.
Краткая теория
Физический маятник – твердое тело, которое может совершать колебания под действием силы тяжести относительно неподвижной оси O(рис. 1).
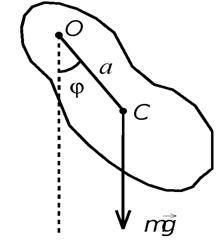
Рис. 1. Физический маятник
Запишем основное уравнение динамики вращательного движения.
.
I β = М,(1)
где I – момент инерции маятника;
 – угловое ускорение, φ – угол отклонения маятника от положения равновесия, М - сумма проекций моментов сил на направление оси вращения. Если момент сил трения много меньше момента силы тяжести, то
– угловое ускорение, φ – угол отклонения маятника от положения равновесия, М - сумма проекций моментов сил на направление оси вращения. Если момент сил трения много меньше момента силы тяжести, то
M = - mga ×sinj,, (2)
где т – масса маятника, g –- ускорение свободного падения, а –- расстояние от оси вращения до центра тяжести.
Уравнение движения (1) с учетом (2) примет вид
I j = - mga ×sinα
где ωо2 = (mga)/I,тогда получим уравнение:
 . (3)
. (3)
Уравнение (3) является линейным дифференциальным уравнением относительно функции φ(t).
Если амплитуда колебаний физического маятника не мала, дифференциальное уравнение (3) не будет линейным. Для больших углов отклонений маятника период Т начинает зависеть от амплитуды колебаний φ m . Эту зависимость можно представить суммой бесконечного ряда, первые слагаемые которого равны
 . (4)
. (4)
При малых колебаниях угол φ мал, поэтому sinφ ≈ φ и уравнение (3) становится дифференциальным уравнением гармонических колебаний
 . (5)
. (5)
Решение этого уравнения:
j = j m cos(ω0t + α), (6)
где α - начальная фаза колебаний, ωо = 2π /Т - циклическая частота колебаний.
Запишем формулу периода малых колебаний, как
 (7)
(7)
Получим зависимость периода малых колебаний от расстояния а. Момент инерции, согласно теореме Штейнера, равен
 , (8)
, (8)
где Iс - момент инерции маятника относительно оси, проходящей через центр масс. Подставляя (8) в (7), получим
 (9)
(9)
Согласно этой формуле период колебаний Т одинаков при двухразличных значениях а (рис. 2): Т 1 = Т 2 при
 , откуда
, откуда
 . (10)
. (10)
Подставим (10) в формулу (9). Получим
 (11)
(11)
Величина  (12)
(12)
называется приведенной длиной физического маятника.
Сравнивая формулы (11) и (7) получим
 (13)
(13)
Формула для периода малых колебаний маятника будет иметь следующий вид
 . (14)
. (14)
В данной работе с помощью физического маятника находится ускорение свободного падения g,которое исходя из уравнения (14),
 . (15)
. (15)
Приведённая длина — это условная характеристика физического маятника. Она численно равна длине математического маятника, период которого равен периоду данного физического маятника.
Приведенная длина  находится из формулы (12), в которой а 1и а 2определяются из графика зависимости Т от а, построенного на основе результатов эксперимента.
находится из формулы (12), в которой а 1и а 2определяются из графика зависимости Т от а, построенного на основе результатов эксперимента.
Для уменьшения погрешности измерения в эксперименте измеряют период колебаний маятника относительно осей, находящихся по обе стороны от центра тяжести. На рис. 2 представлена теоретическая зависимость периода колебаний от параметра a, которая зеркально симметрична относительно оси Т.
 |
На рисунке приведенная длина маятника L np = a 1 + a 2 равна расстоянию между точками А ̀В или В̀ А.
Молекулы, образующие тело, находятся в состоянии непрерывного беспорядочного движения. При этом они сталкиваются друг с другом и изменяют свою скорость как по направлению, так и по величине. Правда, столкновения в обычном смысле этого слова не происходит, так как соприкосновению молекул припятствует резко возрастающие при их сближении силы отталкивания. Однако действие этих сил приводит к такому же результату, как и обычное столкновение, т.е. к отскакиванию сблизившихся молекул друг от друга.
В молекулярно-кинетической теории пользуются моделью идеального газа, согласно которой считают, что:
1)собственный объем молекул газа пренебрежимо мал по сравнению с объемом сосуда;
2)между молекулами газа отсутствуют силы взаимодейтсвия;
Билет 1) Кинематика материальной точки. Основные характеристики: перемещение, скорость, ускорение. Равномерное и равноускоренное движение - уравнения и графики
Механика - область физики, изучающая движение материальных тел и взаимодействие между ними.
Кинема́тика — раздел механики, изучающий математическое описание движения тел без рассмотрения причин движения.
Материальная точка – любое тело, размерами окторого при данных условиях можно пренебречь.
Абсолютно твердое тело – тело, деформациями которого при данных условиях можно пренебречь.
Механическое движение – изменение положения тел в пространстве относительно других тел с течением времени.
Система отсчёта — это совокупность тела отсчета, связанной с ним системы координат и системы отсчёта времени, по отношению к которым рассматривается движение тел.
Перемещение - векторная физическая величина, характеризующая изменение положения материальной точки относительно выбранной системы отсчёта. Вектор перемещения соединяет начальное положение точки с конечным.
Траектория – линия, вдоль которой движется тело.
Путь – длина траектории.
Скорость – векторная физическая величина, характеризующая быстроту движения и направление движения материальной точки в пространстве относительно выбранной системы отсчёта.
Скорость бывает средней по перемещению и средней путевой. Средняя по перемещению – мгновенная, это вектор (производная пути по времени); а средняя путевая – отношение пройденного пути ко времени, за которое этот путь пройден.
Ускорение – векторная физическая величина, характеризующая изменение скорости за единицу времени.
Равноме́рное движе́ние — механическое движение, при котором тело за любые равные отрезки времени совершает одинаковые перемещения. Равномерное движение материальной точки — это движение, при котором скорость точки остаётся неизменной. Перемещение, пройденное точкой за время , задаётся в этом случае формулой .
Если направить координатную ось вдоль прямой, по которой движется точка, то зависимость координаты точки от времени является линейной:
,
где — начальная координата точки, — проекция вектора скорости на координатную ось
.
Равноускоренное прямолинейное движение — это движение, при котором скорость тела за любые равные промежутки времени изменяется одинаково, т. е. это движение с постоянным по модулю и направлению ускорением.
При равноускоренном движении по прямой скорость тела определяется формулой:
Зная, что , найдём формулу для определения координаты x:
Билет 2) Криволинейное движение. Нормальное (центростремительное) и тангенциальное (касательное) ускорение. Угловая скорость и угловое ускорение, их связь с линейной скоростью и ускорением. Радиус кривизны таректории.
Криволинейное движение – это движение, траектория которого представляет собой кривую линию (например, окружность, эллипс, гиперболу, параболу). Примером криволинейного движения является движение планет, конца стрелки часов по циферблату и т.д. В общем случае скорость при криволинейном движении изменяется по величине и по направлению.
Криволинейное движение материальной точки считается равномерным движением, если модуль скорости постоянен (например, равномерное движение по окружности), и равноускоренным, если модуль и направление скорости изменяется (например, движение тела, брошенного под углом к горизонту).
Нормальное ускорение(центростремительное) - величина, характеризующая быстроту изменения направления вектора скорости.
Тангенциальное ускорение – величина характеризующая быстроту изменения модуля скорости материальное точки.
Радиус кривизны – радиус окружности R, по которой движется тело.
|
|
|

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!