Автомобильные исполнительные механизмы представляют собой,
главным образом, электромагнитные механизмы в виде электродви-
гателей, а также втягивающие и поворотные соленоиды (электро-
магниты). Исключением является пиротехническая система надува-
ния подушки безопасности. Соленоидные исполнительные механиз-
мы могут быть самостоятельными сервоэлементами или выполнять
управляющие функции, управляя работой силового устройства
(например, гидромеханического).
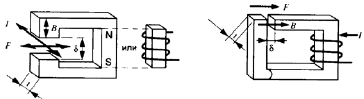
Электродинамические устройства (рис. 3.2) основаны на силе, дей-
ствующей на подвижный заряд или проводник с током в магнитном
поле (сила Лоренца). Катушка или постоянный магнит генерируют
постоянное магнитное поле. Электрическая энергия, предназначен-
ная для получения силы, прикладывается к подвижной обмотке рото-
ра (шаговый двигатель). Высокая точность исполнительного меха-
низма достигается особенностью конструкции обмотки ротора, имею-
щей малую массу и низкую индуктивность. Два аккумулирующих
элемента (один на закрепленном, другой на подвижном компоненте)
вырабатывают силы, действующие в двух направлениях через ревер-
сирование тока в обмотках якоря и возбуждения. Постоянный магнит
(феррит, SmCo и т. д.), создающий поле возбуждения, имеет характе-
ристики проницаемости поля, такие же как в вакууме (μ0).
Вторичное поле, создаваемое током якоря в разомкнутой магнит-
ной цепи, размагничивает данную цепь. Можно сказать, что сила
(момент) электродинамического исполнительного механизма при-
мерно пропорциональна току и не зависит от перемещения.
Электромагнитный принцип в соответствии с рис. 3.2 базируется
на взаимном притяжении мягких ферромагнетиков в магнитном по-
ле. Электромагнитные исполнительные механизмы оснащаются толь-
ко одной катушкой, создающей поле и потребляющей энергию,
идущую на преобразование.
71
Рис. 3.2. Электродинамический (а) и электромагнитный (б) преобразователи
Для повышения индуктивности катушка оснащена железным сер-
дечником (дозатор топлива). Однако, поскольку сила пропорциональ-
на квадрату магнитной индукции, устройство работает только в од-
ном направлении, поэтому требуется возвратный элемент (пружина
или магнит). Динамическая характеристика или отклик на включение
электромеханического привода описывается дифференциальным урав-
нением для электрических схем и уравнениями Максвелла, по кото-
рым определяется зависимость силы тока от перемещения.
Электрическая цепь, как правило, состоит из индуктора с актив-
ным сопротивлением. Одним из средств улучшения динамической
характеристики является перевозбуждение индуктора в момент ак-
тивизации, в то время как уменьшение тока может быть ускорено
стабилитроном. В любом случае улучшение характеристики дости-
гается за счет дополнительных расходов и потерь в электронных
средствах запуска исполнительного механизма. Диффузия поля яв-
ляется одним из сдерживающих факторов, на который трудно вли-
ять в приводах с высокими динамическими характеристиками. Опе-
рации быстрого переключения сопровождаются высокочастотной
пульсацией поля в магнитомягком материале магнитной цепи при-
вода. Эти колебания, в свою очередь, наводят вихревые токи
(нарастание и затухание магнитного поля). Результирующая за-
держка в нарастании и уменьшении сил может быть сокращена
только
выбором материала с низкой электрической проводимостью и про-
ницаемостью.
Выбор конструкции определяется условиями работы (например,
требованиями к динамической характеристике).
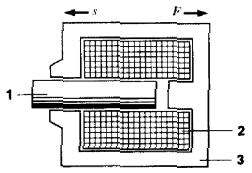
Электромагнитный исполнительный механизм поступательного
движения имеет соленоид с втягивающей силой, уменьшающейся
пропорционально квадрату перемещения якоря (рис. 3.3 и 3.4).
72
Рис. 3.3. Втягивающий соленоид:
1 – якорь; 2 – катушка; 3 – ярмо; s – ход; F – сила
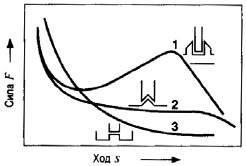
Рис. 3.4. Характеристики втягивающего соленоида:
1 – плунжерный якорь; 2 – конический якорь; 3 – цилиндрический якорь
Форма кривой определяется типом рабочего зазора (например,
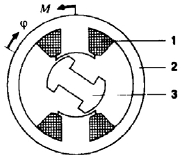
конического или цилиндрического якоря). Вращательные электро-
магнитные исполнительные механизмы характеризуются опреде-
ленным положением полюсов в статоре и роторе. Когда ток при-
кладывается к одной из катушек, то роторные и статорные полюсы
притягиваются и возникает крутящий момент. Вращательные при-
воды с простой обмоткой (рис. 3.5) содержат пару полюсов на каж-
дой из двух основных секций, а также катушку статора. Их макси-
мальное смещение составляет приблизительно 45°.
73
Рис. 3.5. Электромагнитный однообмоточный поворотный исполнительный механизм:
1 – обмотка; 2 – статор; 3 – ротор; φ – угол поворота; М – крутящий момент
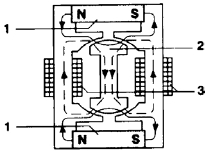
Двигатель с большим пусковым моментом (рис. 3.6) является ре-
версивным электромагнитным вращательным исполнительным меха-
низмом, в котором задаются характеристики стационарной рабочей
точки при отсутствии противоположно направленных сил. Состояние
ротора поддерживается в стационарном положении посредством дей-
ствия поля постоянного магнита в статоре. Магнитное поле, генериру-
емое одной или двумя обмотками статора, создает крутящий момент и
обеспечивает одностороннюю компенсацию магнитного поля возбуж-
дения. Такая схема наиболее подходит для случаев, когда требуется
получить значительные силы при небольших углах поворота. Зависи-
мость между прикладываемой силой тока и моментом двигателя яв-
ляется приблизительно линейной. Принцип действия двигателя с боль-
шим пусковым моментом также используется для исполнительных
механизмов с поступательным направлением движения. Характери-
стики электромагнитных поворотных приводов показаны на рис. 3.7.
Рис. 3.6. Двигатель с большим пусковым моментом:
1 – магниты; 2 – ротор; 3 – управляющие обмотки
74
Рис. 3.7. Характеристики электромагнитных поворотных приводов:
1 – поворотный привод с одноходовой обмоткой;
2 – двигатель с большим пусковым моментом
Электродинамические исполнительные механизмы бывают раз-
личных типов. Короткоконтактный линейный двигатель (рис. 3.8)
представляет собой исполнительный механизм с практически круг-
лой дисковой катушкой.
Рис. 3.8. Электродинамический короткоконтактный линейный двигатель:
1 – катушка; 2 – постоянный магнит; 3 – ярмо
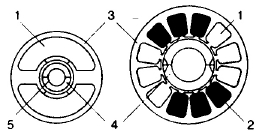
Различают исполнительные механизмы с одной или двумя ста-
торными обмотками (рис. 3.9). Оба типа содержат постоянный маг-
нит в роторе и одну или две статорные обмотки. Магнит ротора,
намагниченный на обоих концах, создает в рабочем зазоре магнит-
ный поток, взаимодействующий с током якоря и создающий крутя-
щий момент.
75
а
б
Рис. 3.9. Электродинамический поворотный исполнительный механизм:
а – однообмоточный механизм; б – двухобмоточный механизм: 1 – катушка 1;
2 – катушка 2; 3 – статор; 4 – постоянный магнит; 5 – вал
Диапазон перемещений составляет менее 45°. У однообмоточно-
го поворотного исполнительного механизма он определяется сило-
выми требованиями и угловым диапазоном, для которого требуется
необходимая плотность потока.
Двухобмоточный поворотный исполнительный механизм пред-
ставляет собой сочетание двух поворотных однообмоточных испол-
нительных механизмов со сдвигом обмоток на 90° по окружности
статора. Он предназначен для создания усилий, препятствующих
крутящему моменту. Стабильная рабочая точка достигается в нуле-
вой точке перехода на результирующей кривой крутящего момента
без дополнительных противоположно действующих сил.
Характеристики электродинамических поворотных исполнитель-
ных механизмов представлены на рис. 3.10.
Электромеханические исполнительные механизмы являются эле-
ментами непосредственного управления; они служат для превраще-
ния электрического сигнала в механическое перемещение или рабо-
ту без какого-либо промежуточного устройства преобразования.
Характеристика электромагнитных исполнительных механизмов
приведена на рис. 3.11.
Типичное применение – перемещение заслонок, катушек и кла-
панов. Описываемые приводы не обладают способностью к само-
возврату (не имеют устойчивой рабочей точки); они способны вы-
полнять только позиционные операции из постоянного исходного
положения (рабочая точка), в том случае, если приложена противо-
действующая сила (например, возвратная пружина).
76
а
б
Рис. 3.10. Характеристики электродинамических поворотных
исполнительных механизмов:
а – однообмоточный поворотный исполнительный механизм; б – двухобмоточный
исполнительный механизм; 1 – катушка 1; 2 – катушка 2; 3 – катушки 1 и 2
Рис. 3.11. Характеристики электромагнитных исполнительных механизмов
(рабочие точки (А) втягивающего электромагнита):
1, 2, 3 – кривые для различных токов; 4 – характеристика возвратной пружины;
А – рабочие точки
77
Гидромеханические и пневматические исполнительные механизмы
(гидро- и пневмоприводы), использующие принципы по преобразова-
нию и регулированию энергии, показаны в табл. 3.2. Структура гидро-
механического исполнительного механизма приведена на рис. 3.12.
Таблица 3.2
Характеристики гидромеханических и пневматических
исполнительных механизмов
78
| Параметры
| Исполнительный механизм
| Параметры Гидравлический |
Пневматический
| | Среда
| Жидкость для гидросистем
(обычно масло)
Поступает из бака, масло-
отстойника.
Практически несжимаемая.
Самосмазка.
Вязкость сильно зависит от
температуры
| Газ
(обычно воздух)
Поступает из окружающего
воздуха.
Сжимаемый.
Требует дополнительной
смазки
Флуктуации вязкости прене-
брежимо малы
| | Давление
| Приблизительно до 30
МПа
| Приблизительно до 1 МПа
(приблизительно более 0,05
МПа для вакуумных приво-
дов)
| | Линия подсо-
единения
| Напорная и сливная до-
полнительная линия
| Только подвод давления.
Возврат непосредственно в
окружающую среду
| | Виды
применения
| Приводы с жесткими тре-
бованиями по нагрузке,
синх-ронизации и позици-
онированию в закрытой
(замкнутой) системе
управления
| Приводы с ограниченными
тре-бованиями по усилию,
механическое позициониро-
вание, работа в открытой
системе управления
|
|
Рис. 3.12. Структура гидромеханического исполнительного механизма:
1 – информация; 2 – транзисторный выходной каскад; 3 – соленоид управления;
4 – гидроагрегат; 5 – потери; 6 – внешняя электроэнергия; 7 – внешняя гидроэнергия
Механизмы чаще всего строятся на принципах гидростатических
преобразователей энергии. Они выполняют перемещения, преобра-
зуя энергию давления жидкой среды в механическую работу и
наоборот (рис 3.13).
В противоположность им, гидродинамические преобразователи
работают по принципу преобразования энергии потока (кинетиче-
ской энергии движущейся жидкости) в механическую работу.
Потери во время работы являются следствием утечек и трения.
Жидкостно-тепловые потери вызываются гидродинамическим со-
противлением, при котором действие дросселя (шайбы, сужающей
поток) преобразует гидравлическую энергию в тепло. Часть тепла
рассеивается в окружающей среде, а некоторая его часть поглоща-
ется и уносится рабочей жидкостью.
Количество теплоты Q теплоты = Q 1 ⋅ Р 1 – Q 2 ⋅ Р 2 (для несжимае-
мых жидкостей Q теплоты = Q (Р 1 – Р 2))
Рис. 3.13. Гидромеханический исполнительный механизм
Турбулентность возникает там, где жидкость протекает через
участки ограничений для движения потока (например, через дрос-
сели). Тогда скорость потока среды не зависит в значительной мере
от вязкости. С другой стороны, вязкость не играет той роли, как при
ламинарном течении в узких трубках и отверстиях.
Гидромеханические усилители управляют процессом перехода
энергии из гидравлической в механическую. Регулирующий меха-
низм должен конструироваться для управления только относитель-
79
но малым потоком энергии, необходимым для окончательного по-
зиционирования клапанов.
С помощью переключающих клапанов (рис. 3.14) открывает-
ся/закрывается отверстие, управляющее потоком к/от гидромехани-
ческого преобразователя энергии. При достаточном открытии отвер-
стия дроссельные потери остаются незначительными. Для получения
возможности непрерывного управления гидромеханизмом с факти-
ческим отсутствием потерь может использоваться модулированная
продолжительность импульса открытия и закрытия. Однако в дей-
ствительности флуктуации давления и механический контакт между
компонентами клапана создают нежелательные шум и вибрацию.
Рис. 3.14. Регулирование энергии с помощью клапанов контроля давления