1. Возможность резкого скачка кода, при замыкании, контакта УС на две ламели. Устраняется путем вычитания предыдущего значения из последующего и сравнения результата со значением кванта. Если результат вычитания больше кванта, то за истинное значение принимается результат предыдущего считывания.
2. Возможность подгорания или контакта УС. Устраняется периодической чисткой контакта.
3. Поскольку для обеспечения надежного контакта соединение УС и объекта подпружинивается, то возможно ослабевание пружины за счет старения и потери упругости.
6.1.2. ЦИУ линейных перемещений
с оптическим преобразователем
Эти ЦИУ относятся к ЦИУ бесконтактного типа. Они отличаются от рассмотренных выше ЦИУ линейных перемещений контактного типа принципом построения кодирующего устройства. В этих ЦИУ КУ представляет собой совокупность источника света (чаще всего инфракрасного излучения), фокусирующих линз и преобразователя кода, входными элементами которого являются, например, фотодиоды.
Вариант схемной реализации оптического кодирующего устройства приведен на рис. 6.5.
Работа схемы осуществляется следующим образом. При нулевом перемещении свет на линзы 1 – 7 не попадает. Все фотодиоды закрыты, через них протекает темновой ток, значение которого имеет порядок 10-5 – 10-11 А. Резисторы R1 – R3 должны быть такого номинала, чтобы падение напряжения на них при максимальном темновом токе через каждую вертикальную линейку фотодиода не превышало нескольких мВ.

Рис. 6.5. Функциональная схема оптического кодирующего устройства
В этом случае можно считать, что UЗИ @ 0 В для каждого транзистора и выходной код Nlx = 0. При перемещении детали на расстояние lx свет от источника HL попадает на соответствующую фокусирующую линзу. Линза выполнена так, чтобы сконцентрировать световой поток строго на соответствующую горизонтальную "линейку" фотодиодов. При этом откроются соответствующие фотодиоды, и через них будет протекать фототок:
 ,
,
где SФ – интегральная светочувствительность фотодиода; Ф – световой поток.
В результате этого между затвором и истоком соответствующих транзисторов возникает разность потенциалов; транзисторы откроются, и на истоках этих транзисторов появится напряжение, практически равное напряжению питания.
Резисторы R4 – R6 задают нулевое напряжение на выходах закрытых транзисторов.
Достоинство ЦИУ с таким КУ
Отсутствует механический контакт между кодирующей маской и считывателем, следовательно, повышается надежность работы схемы.
Недостатки ЦИУ с таким КУ
1. Схема содержит большое количество элементов.
2. Может применяться только для грубых измерений с малой дискретностью.
Для устранения указанных выше недостатков в ЦИУ данного типа применяют кодирующие маски, содержащие фокусирующие линзы с затененными и пропускающими световой поток участками, расположенными по двоичному закону. Источник света так же, как и в схеме, приведенной на рис. 6.5, располагается на стержне с прорезью, связанной с объектом, перемещение которого измеряется. Эскиз кодирующего устройства данного типа приведен на рис. 6.6.

Рис. 6.6. Эскиз КУ с расположением фокусирующих линз
по двоичному закону
Функциональная схема КУ для ЦИУ данного типа приведена на рис. 6.7.

Рис. 6.7. Функциональная схема КУ с расположением фокусирующих линз
по двоичному закону
Достоинства такого КУ
1. Небольшое количество элементов.
2. Возможность получения очень высокой разрядности преобразования.
Недостатки КУ
1. Большое количество линз.
2. Влияние загрязнения линзы на параметры преобразования при использовании пары "источник света – фотодиод", работающей в видимой части спектра (устраняется путем применения инфракрасных светодиодов и фотодиодов).
3. Поскольку такие преобразователи – это устройства непрерывного действия, то процессы преобразования кода и записи кода в регистр результата не синхронизированы с движением детали. Следовательно, код перемещения, который фиксируется в регистре результата, при использовании двоичного кода может оказаться неверным, т.к. в регистр может быть записан код во время межкодового перехода.
Для устранения этого недостатка выполняют кодирующую маску с использованием кода Грея. В таком коде каждая последующая кодовая комбинация отличается от предыдущей не более чем на один разряд. Полученный в результате код затем преобразуется в двоичный или двоично-десятичный.
Для рассмотренных выше преобразователей  . Таблица истинности для преобразования кода Грея в двоичный код представлена в табл. 6.1.
. Таблица истинности для преобразования кода Грея в двоичный код представлена в табл. 6.1.
Таблица 6.1
| N
| Двоичный код
| Код Грея
|
| у3
| у2
| у1
| х3
| х2
| х1
|
| 22
| 21
| 20
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этом случае ошибка не превышает единицы младшего разряда. Схема преобразования кода Грея в двоичный код может быть выполнена по двум вариантам: последовательный и параллельный.
Принципиальная схема последовательного преобразователя 3-разрядного кода Грея в 3-разрядный двоичный код приведена на рис. 6.8, а параллельного преобразователя – на рис. 6.9.
 Рис. 6.8. Принципиальная схема последовательного преобразователя
Рис. 6.8. Принципиальная схема последовательного преобразователя
кода Грея в двоичный код
Достоинство схемы – простота реализации за счет использования однотипных элементов (двухвходовых "исключающее ИЛИ").
Недостаток схемы – снижение быстродействия при увеличении разрядности.

Рис. 6.9. Принципиальная схема параллельного преобразователя
кода Грея в двоичный код
Достоинство схемы – более высокое быстродействие, чем у схемы, приведенной на рис. 6.3.
Недостаток схемы – более высокая, чем у последовательного преобразователя кодов, стоимость при большой разрядности кодов (обусловленная применением многоразрядных схем "исключающее ИЛИ").
6.1.3. Числоимпульсный метод измерения перемещения
Метод основан на формировании и подсчете импульсов при каждом переходе считывателя через оцифрованную отметку кодовой маски.
В данном случае преобразователь кода не требуется. И в самом общем случае численно-импульсный преобразователь может быть выполнен по схеме, приведенной на рис. 6.10.
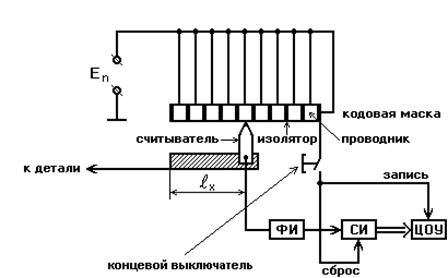
Рис. 6.10. Простейший числоимпульсный измеритель
линейных перемещений
Работа схемы осуществляется следующим образом. Счетный импульс проходит на схему формирователя импульсов ФИ каждый раз, когда считыватель переходит от проводника к изолятору. Схема ФИ формирует импульс с необходимой длительностью фронта и амплитудой, устраняя дребезг механического контакта, если он вдруг возникнет. Счетчик импульсов СИ подсчитывает число этих импульсов, причем каждый импульс соответствует перемещению на один квант. Таким образом, выходной код СИ

где n – число импульсов, прошедших на СИ.
При достижении максимального перемещения замыкаются контакты концевого выключателя и вырабатывается импульс "запись" на ЦОУ, по переднему фронту которого регистры ЦОУ "защелкивают" цифровой код с выхода СИ. Этот импульс служит для СИ сигналом "сброс".
Недостаток такого измерителя – отсутствие возможности преобразования обратного перемещения, т.к. отсутствует возможность реверса СИ. Поэтому для проведения следующего измерения необходимо вернуть считыватель в исходное состояние.
Для устранения указанного недостатка применяют сдвоенную кодовую маску или сдвоенный считыватель импульсов. Функциональная схема реверсивного числоимпульсного измерителя линейных перемещений представлена на рис. 6.11.

Рис. 6.11. Функциональная схема реверсивного числоимпульсного
измерителя линейных перемещений
Работа схемы осуществляется следующим образом. При перемещении вперед рабочим является считыватель 1. При каждом переходе его с проводящего участка на изолятор формирователь импульсов ФЗФ1 устанавливает на выходе "1", которая:
1) указывает реверсивному СИ направление счета на увеличение;
2) запрещает работу схемы формирователя импульсов ФЗФ2 до тех пор, пока не будет снята "1" с выхода ФЗФ1;
3) является счетным импульсом для реверсивного СИ.
При переходе считывателя 1 с изолятора на проводник, "1" с выхода ФЗФ1 снимается. При перемещении назад первым достигает изолятора считыватель 2. Следовательно, "1" будет сформирована на выходе ФЗФ2. Эта "1":
1) указывает РСИ направление счета на вычитание;
2) запрещает формирование импульса на выходе ФЗФ1;
3) является счетным импульсом для РСИ.
Логическая "1" на выходе ФЗФ2 будет снята при переходе считывателя 2 с изолятора на проводник.
Погрешности измерителей линейных перемещений
– методическая – погрешность квантования dКВ;
– инструментальные.
Рассмотрим подробнее инструментальные погрешности.
1. Погрешность меры перемещения. Возникает из-за неточности воспроизведения квантов перемещения, т.к. реальный размер кванта отличается от номинального. Эта погрешность мультипликативная, то есть

2. Погрешность сравнения с мерой. Возникает из-за неточного совмещения начала отсчета (исходного положения) считывателя и кодовой маски. Эта погрешность является аддитивной.
3. Погрешность линейности. Возникает из-за неравенства квантов между собой. В результате реальная характеристика будет отличаться от линейной зависимости, что показано, в общем виде, на рис. 6.12.

Рис. 6.12. Характеристика преобразования измерителя
линейных перемещений
Здесь DL – абсолютная погрешность линейности. Это максимальное отклонение кривой реальной характеристики преобразования от прямой, соединяющей две крайние точки. Эта погрешность является аддитивной.
4. В таком устройстве возможна погрешность сбоев. Учесть ее нельзя, она может достичь 100 %. Связана с механическим износом деталей конструкции преобразователя и влиянием внешней среды.
6.1.4. Измерители больших перемещений (расстояния)
Такие приборы применяются для измерения пройденного расстояния, в частности движущихся средств, например автомобилей.
Принцип действия измерителей линейных перемещений данного типа основан на преобразовании числа импульсов, соответствующего одному кванту, в цифровой код, соответствующий перемещению.
В частности, в самом простом случае для одной группы "контакт – считыватель" при измерении перемещения автомобиля квант

где d – диаметр колеса.
Структурная схема измерителя расстояния с использованием числоимпульсного метода преобразования приведена на рис. 6.13. В данной схеме в качестве датчика применена пара "магнит – геркон", но возможно использовать и пару "светодиод – фотодиод".

Рис. 6.13. Структурная схема измерителя расстояния
На рисунке обозначено: ФИ – формирователь импульсов; СИ – счетчик импульсов; Рг – регистр хранения (например, FLASH ПЗУ); ЦОУ – цифровое отсчетное устройство; БП – блок питания.
Работа схемы осуществляется следующим образом. При включении питания схема БП вырабатывает импульс предустановки, производящий запись кода с выхода Рг в схему СИ через выходы параллельной загрузки.
В качестве регистра можно использовать FLASH ПЗУ с низким напряжением записи.
В такой конструкции магнит крепится на подвижной части колеса, например на спице (для велосипеда) или диске (для автомобиля), а геркон(ы) крепится на неподвижной части в непосредственной близости от колеса. Один из выводов контакта следует присоединять к земле, второй – к входу ФИ.
При прохождении магнита рядом с контактом он замыкается, и схема ФИ подает на СИ импульс низкого логического уровня. В результате содержимое СИ увеличивается, и на ЦОУ отображается текущее значение пройденного расстояния.
Если на подвижной части колеса расположен один магнит, то содержимое СИ увеличивается на 1 за один оборот колеса, а квант расстояния
qlx = p×d,
где d – расстояние от центра колеса до магнита.
Обычно для повышения разрешающей способности измерителя расстояния на колесе устанавливают m магнитов. В этом случае квант расстояния qlx = p×d/m, а выходной код СИ, соответствующий одному обороту:
NX = qlx × m.
Для получения отсчета NX в метрах следует выполнить условие
qlx = 10n м,
где n – любое целое (положительное или отрицательное) число или нуль.
Отсюда расстояние d определяется формулой
d = 10n × m/p.
В схеме, приведенной на рис. 6.13, для сохранения значения общего пройденного километража при отключении питания БП выдает на Рг сигнал "запись", и текущее значение кода NX с выхода СИ записывается в Рг.
В качестве ФИ можно использовать схему, приведенную на рис. 6.14.

Рис. 6.14. Принципиальная схема ФИ в измерителе расстояния
Порог срабатывания ФИ определяется по формуле

где U(1) – напряжение логической единицы инвертора.
Структурная схема, приведенная на рис. 6.13, может использоваться не только при измерении расстояния, но и в измерителях скорости. Один из вариантов структурной схемы цифрового спидометра-счетчика километража приведен на рис. 6.15.

Рис. 6.15. Структурная схема цифрового спидометра-счетчика километража
Здесь нижняя часть схемы, связанная с ЦОУ1, представляет собой счетчик километража, работа которого была рассмотрена выше. Работа верхней части схемы, связанной с ЦОУ2, и представляющей собой собственно спидометр, осуществляется следующим образом. По переднему фронту импульса Т0 с выхода формирователя времени измерения ФВИ блок управления БУ снимает со счетчика импульсов СИ2 сигнал сброс, разрешая подсчет импульсов с выхода селектора DD1, прошедших от формирователя ФИ. По заднему фронту импульса Т0 БУ подает на Рг2 сигнал "запись", переписывая в него код результата преобразования скорости NVx. Затем БУ подает на СИ2 сигнал "сброс" и удерживает его до прихода следующего переднего фронта импульса Т0.
Код NVx на выходе СИ2 связан с измеряемой скоростью VX следующим выражением:
NVx = VX × T0.
Емкость СИ2 находится по формуле
N0 = VXmax/qVx,
где qVx – разрешающая способность спидометра, км/ч; VXmax – максимальная измеряемая скорость, км/ч.
В результате
T0 = N0/VXmax.
Поскольку значение Т0 получено в часах, следует умножить его на 3600 для перевода в секунды.
6.1.5. Измерители угловых перемещений
Приборы, предназначенные для измерения угловых перемещений, работают так же, как измерители линейных перемещений, и характеризуются теми же составляющими погрешности измерения. Отличие в том, что кодирующая маска выполняется в форме круга. Общий вид таких КМ приведен на рис. 6.16.

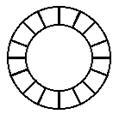
Рис. 6.16. Общий вид КМ измерителей угловых перемещений
Контрольные вопросы
1. Составьте таблицу истинности для 4-разрядного кода Грея.
2. Спроектируйте принципиальную схему последовательного преобразователя 4-разрядного кода Грея в двоичный код.
3. Спроектируйте принципиальную схему параллельного преобразователя 4-разрядного кода Грея в двоичный код.
4. Укажите достоинства и недостатки числоимпульсного метода измерения линейных перемещений.
5. Какие виды кодирующих масок в ЦИУ линейных перемещений вам известны?
6. Приведите пример функциональной схемы кодирующего устройства контактного типа для ЦИУ линейных перемещений и поясните ее принцип действия.
7. Приведите пример функциональной схемы кодирующего устройства бесконтактного типа для ЦИУ линейных перемещений и поясните ее принцип действия.
8. Для чего используется реверсивный числоимпульсный измеритель линейных перемещений? Приведите функциональную зависимость выходного кода данного устройства от входного перемещения.
9. В чем заключается основное отличие ЦИУ линейных и угловых перемещений?
10. Поясните принцип действия цифрового измерителя расстояния.
11. Чем обусловлены погрешности ЦИУ линейных перемещений с кодирующим устройством контактного типа?
12. Чем обусловлены погрешности ЦИУ линейных перемещений с кодирующим устройством бесконтактного типа?






