Индукционный датчик ИД-3
Индукционный датчик служит для измерения направления горизонтальной составляющей магнитного поля Земли и, следовательно, определения магнитного курса самолета, необходимого для коррекций показаний гироагрегата курсовой системы в азимуте.
Чувствительным элементом датчика ИД-3 служат три магнитных зонда, закрепленных на основании и расположенных друг относительно друга под углом 60°.
Применение индукционного чувствительного элемента для измерения магнитного курса взамен ранее применявшегося в компасах постоянного магнита, позволяет избавиться от моментов трения, возникавших в опорах магнитной системы и в конструкции токоподводов (коллектороб со щетками) и. следовательно, позволяет намного повысить точность и стабильность показаний при малых величинах горизонтальной составляющей магнитного поля Земли (до Н=0.06 Э).
Каждый из трех магнитных зондов состоит из двух пермаллоевых сердечников марки 80НХС длиной 39 мм и диаметром 10,5 мм, заложенных в стеклянные трубки.
Каждый пермаллоевый сердечник закладывается в пластмассовый каркас, поверх которого наматываются две обмотки: намагничивающая обмотка (490 витков) и сигнальная обмотка (1960 витков).
Осевое перемещение пермаллоевых сердечников в каркасах с обмотками ограничивается тонкими стеклянными стержнями. Пермаллоевые сердечники располагаются попарно параллельно друг другу и заключаются в алюминиевом пенале, образуя магнитный зонд.
Намагничивающие обмотки трех зондов индукционного треугольника соединены последовательно навстречу друг другу и питаются переменным током напряжением 1,5 в частоты 400 гц от обмотки силового трансформатора усилителя.
Сигнальные обмотки магнитных зондов соединены звездой, фазовые напряжения этих обмоток трехпроводной связью передаются на обмотки статора сельсина-приемника коррекционного механизма
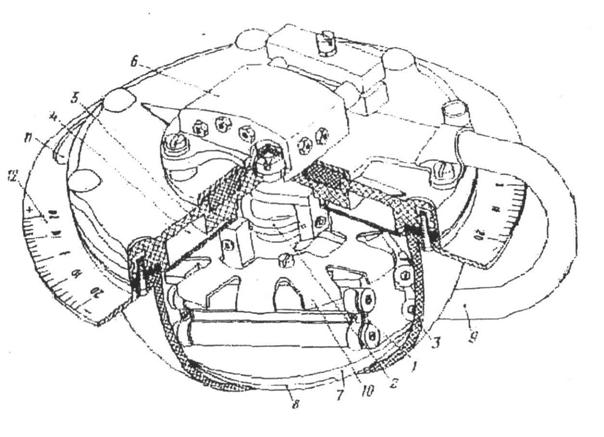
Индукционный датчик приведен на рис.9.49;
1 - индукционный чувствительный элемент,2 – рама карданова подвеса,. 3 - корпус,4 - компенсационная камера ,5 - крышка, 6 - девиацйонный прибора, 7 – груз,8 – паз, 9 – жгут, 10 – амортизационное кольцо, 11 – овальное отверстие, 12 – шкала.
Для повышения точности измерения магнитного курса необходимо обеспечить достаточно строгое горизонтирование платформы индукционного чувствительного элемента 1, на которой расположена система, состоящая из трёх зондов. С этой целью платформа индукционного треугольника с тремя зондами подвешена в виде физического маятника на кардановой подвеске 2 и помещается в жидкость, а проводники от чувствительного элемента опускаются спиралью непосредственно к монтажной колодке датчика. Такая конструкция токоподводов более надежна в работе и резко повышает срок службы прибора.
Карданова подвеска 2 датчика позволяет сохранить горизонтальное положение чувствительного элемента при наклонах корпуса датчика в любую сторону на 15°. Ограничение отклонения чувствительного элемента осуществляется при помощи амортизационного пружинящего кольца 10. Карданова подвеска 2 крепится к крышке 5 и вместе с чувствительным элементом 1 размещается в корпусе 5 прибора. Для уменьшения трения и застоя в Осях кардановой подвески, вызываемых весом подвижной части чувствительного элемента, а также с целью демпфирования колебаний последней, корпус датчика заполняется кремнеорганйческой жидкостью ПМС-10 (полиметилсилоксан). Взвешенное состояние подвижной системы в жидкости достигается за счет подгонки груза 7, укрепленного на основании чувствительного элемента.
При помощи груза можно регулировать степень маятниковостй и, следовательно, собственную частоту колебаний подвесной части прибора. Точная ориентация чувствительного элемента в плоскости горизонта осуществляется подпаиванием балансировочных грузиков в пазы 8 груза 7. Для поддержания постоянного давления жидкости в корпусе датчика при изменении температуры окружающей среды в пределах от —60°С до +150°С в конструкции предусмотрена компенсационная камера 4, размещенная на крышке 5.
Следует отметить, что в целях компактности конструкций датчика ИД-3, пеналы с катушками в чувствительном элементе располагаются в каждом зонде по два вертикально, а не горизонтально, как это имеет место в датчике ИД-2. Каждый из трех зондов, размещенных на платформе, состоит из двух пеналов поверх которых навиты сигнальная и намагничивающая обмотки. Пеналы изготавливаются из прессматериала АГ-4. Присоединение датчика к курсовой системе на самолете производится жгутом имеющим длину 300 мм, оканчивающимся вилкой 2РМДТ24КПН10Ш5А15. Для крепления датчика к самолету в основании датчика предусмотрены три овальных отверстия 11. Они позволяют осуществить разворот датчика при устранении установочной погрешности в пределах ±20°. Отсчет при этом может быть произведен на одной из шкал 12, расположенных для удобства в трех местах основания прибора через 120°.
Устранение полукруговой девиации датчика осуществляется девиационным прибором расположенным на крышке прибора. Датчик должен крепиться к самолету при помощи специальныхантимагнитных винтов и шайб, прикладываемых к датчику.
Основные технические данные датчика ИД-3:
Погрешность датчика в рабочем диапазоне температур при горизонтальной составляющей напряженности магнитного поля Земли Н=0,17Э.не более ±2°
Питание переменным током: 1.5±0.1В 400±8 Гц
Допустимый угол крена к горизонту.±15°
Эффективность девиацнонного прибора от±6° до ±12°
Вес датчика не более 0.7кг
Датчик допускает ударные перегрузки от ускорения 4g при частоте ударных импульсов от 40—80 ударов в минуту.Датчик герметичен и устойчив к воздействию пыли.
Служит для коррекции гироагрегата ГА-3 в азимуте при работе ТКС-П2 в режиме МК, а также выдает значение магнитного курса в блок БГМК-2 при работе ТКС-П2 в режиме ГПК.
Коррекционный механизм КМ-5
Коррекционный механизм КМ-5 служит для:
-связи индукционного датчика ИД-3 с гироагрегатом ГА-3 при работе ТКС-П2 в режиме МК;
-связи индукционного датчика ИД-3 с блоком БГМК-2 при работе ТКС.П2 в режиме ГПК;
-уменьшения магнитной девиации и погрешностей следящих систем;
-ввода магнитного склонения или общей поправки;
-индикации компасного курса.
Внешний вид коррекционного механизма КМ-5 приведён на рисунке 9.50.
В КМ-5 сельсин-приемник СП1 образует следящую систему с ИД-3 (рис. 9.51). При включении питания сигнал с ИД-3 подается на сельсин приемник СП1 коррекционного механизма КМ-5. Сигнал рассогласования с ротора СП1 через усилитель УКМ идет на двигатель Д, который отрабатывает стрелку компасного курса и ротор СП1 до согласования. Одновременно через лекальное устройство ЛУ, уменьшающее магнитную девиацию и погрешности следящих систем, сельсин-приемник СП2 КМ-5 ориентируется по магнитному курсу. Компасный курс индицируется с помощью стрелки по шкале от 0 до 360°. Склонение вводится с помощью кремальеры, связанной со статором сельсин-приемника СП1 и с индексом, который показывает величину введенного склонения по.шкале от 0 до ±180°.
 Рис. 9.50. Функциональная схема коррекционного механизма КМ-5
Рис. 9.50. Функциональная схема коррекционного механизма КМ-5

Рис. 9.51. Коррекционный механизм КМ-5: 1 – индекс ввода ΔMу; 2 – шкала отсчета ΔМу, КК; 3 – стрелка отсчета КК; 4 – винты для устранения четвертной девиации; 5 – рукоятка установки ΔМу
Гироагрегат ГА-3
Гироагрегат ГА-3 служит для осреднения сигнала магнитного курса, снимаемого с ИД-3, а также для работы в качестве гирополукомпаса. Гироагрегат имеет семь основных узлов:
1. Гироузел представляет собой асинхронный двигатель с питанием от сети 36 В 400 Гц и частотой вращения 22000—22500 об/мин. Кожух гиромотора (внутренняя рама) укреплен по оси YY во внешней раме, которая по оси ZZ крепится в следящей раме (рис. 9.52).
2. Узел вращающихся подшипников служит для уменьшения ухода главной оси гироскопа XX в азимуте из-за моментов трения по оси УУ внутренней рамы. Подшипники по оси YY двухрядные и их средние обоймы непрерывно вращаются с помощьюдвух двигателей. Третий двигатель вращает кулачки, которые че-
рез каждые 55 с замыкают контакты и реверсируют двигатели, которые вращают обоймы подшипников.
3. Узел следящей рамы (рамы крена) служит для удержания оси ZZ. внешней рамы гироскопа по вертикали при кренах самолета, благодаря чему устраняется карданная погрешность гироагрегата ГА-3. Ось вращения следящей рамы расположена па продольной оси самолета. На этой оси укреплен двигатель Д2 и сельсин-приемник СП, который связан с гировертикалью (МГВ-1СК № 3 для ГА-3 основного и МГВ-1СК № 2 для ГА-3контрольного). Если при крене самолета вместе с корпусом ГА-3 наклонится ось ZZ, то следящая система рассогласуется, и сигнал с ротора СП через усилитель УВР поступает на двигатель Д2, который развернет следящую раму и установит ось ZZ повертикали.
Если откажет МГВ-1СК или следящая система, осуществляющая связь ГА-3 с МГВ-1СК, и произойдет завал следящей рамы, то сельсин-приемник СП можно подключить к делителю напряжения на резисторах, который расположен в блоке РБ-2 и выдает сигнал нулевого крена самолета. Переключение для ГА-3 основного или контрольного осуществляется переключением переключателей на верхнем электрощитке пилотов из положения «СТАБИЛИЗ. ГА ПО КРЕНУ» в положение «АРРЕТИРОВАНИЕ ГА». Следящая рама арретируется, и при крене ось ZZ кренится вместе с самолетом. При разворотах самолета с креном появляется карданная погрешность, но гироагрегат остается работоспособным.
4. Сельсин-датчик курса СД двухканальный, его ротор укреплен на оси ZZ, а статор—на следящей раме и через редуктор Р связан с двигателем Д1. На двигатель Д1 через усилитель УШК идут сигналы: от сельсин-приемника СП2 КМ-5 (при работе ТКС-П2 в режиме МК), от задатчика курса на пульте управления ПУ-11 (при выставке курса в режиме ГПК), с моста широтного и поправочного потенциометров (при работе ТКС-П2 в режиме ГПК).
На редукторе двигателя Д2 укреплен электромагнит, который срабатывает при нажатии кнопки «СОГЛАСОВАНИЕ» на ПУ-11и увеличивает скорость отработки статора СД с 2—5°/мпн до 8—20°/с.
Рис.9.52 Функциональиая схема гнроагрегата ГА-3
5. Узел горизонтальной коррекции служит для удержания главной оси XX гироскопа параллельно плоскости горизонта, т. е. компенсирует «уход» оси XX от плоскости горизонта из-за кажущегося движения, трения в осях и неточности балансировки гироузла. Узел состоит из дифференциального конденсатора-маятника, усилителя и двигателя, связанного с осью ZZ. При отклонении оси XX от плоскости горизонта изменяется соотношение емкостей дифференциального конденсатора и выдается сигнал на двигатель, который прикладывает момент вокруг оси YY. Гироскоп под действием гироскопического момента прецессирует вокруг оси У У да совпадения оси XX с. плоскостью горизонта. Для ликвидации погрешности в работе коррекции на разворотах она отключается по сигналам от ВК-90.
6. Узел сигнализации завалов состоит из микровыключателей, которые срабатывают при завалах внутренней рамы или рамы крена и выдают сигнал отказа: загорается светосигнализатор «ОТКАЗ О» или «ОТКАЗ К» на пульте управления ПУ-11, светосигнальное табло «ОТКАЗ ГА ОСН» или «ОТКАЗ ГА КОНТР» на средней приборной доске пилотов, выпадает бленкер «КС» на приборе ПНП-1 левом или правом.
7. Узел обогрева состоит из четырех термопатронов и биметаллического реле, которое включает термопатроны при понижении температуры в корпусе ГА-3. Включается обогрев выключателем «ОБОГРЕВ ГА» на верхнем электрощитке пилотов.
Наиболее конструктивно сложным элементом системы ТКС-П2 является гироагрегат ГА-3. Для пояснения структуры и устройства внутренних узлов гироагрегата ГА-3 ниже приведены фотографии гироагрегата ГА-3 и его основных узлов в разобранном виде(см. приложение 1)





