ПОСТРОЕНИЕ ВЕРТИКАЛИ С ПОМОЩЬЮ ФИЗИЧЕСКОГО МАЯТНИКА НА САМОЛЕТЕ
При пилотировании самолета необходимо знать его положение относительно плоскости земного горизонта. Положение самолета относительно плоскости горизонта определяется двумя углами: углом тангажа и углом крена. Угол тангажа — угол между продольной осью самолета и плоскостью горизонта, отсчитываемый в вертикальной плоскости. Угол крена — угол поворота самолета вокруг его продольной оси, отсчитываемый от вертикальной плоскости, проходящей через продольную ось самолета
 .
.
Рис 4.1 фзический маятник – определитель вертикали на самолёте.
Таким образом, положение самолета относительно плоскости горизонта можно определить, если на самолете знать направление истинной вертикали, т. е. направление линии, проходящей через центр Земли и самолет, и замерять отклонение самолета от этого направления.
Отклонение от вертикали на земле определяют обычным отвесом, т. е. физическим маятником.
Предположим, что физический маятник установлен на самолете, который совершает горизонтальный полет с ускорением а (рис. 4.1). На массу маятника т будут действовать силы от ускорения силы тяжести g и инерционная сила от ускорения а. Сумма моментов от этих сил относительно точки подвеса маятника равна нулю и выражается уравнением
 (4.1)
(4.1)
где l — длина маятника;
α — угол отклонения маятника
Из уравнения (4.1) имеем
 (4.2)
(4.2) 
Следовательно, маятник, установленный на объекте, движущемся с ускорением, отклоняется в сторону, противоположную действию ускорения, и показывает так называемую «кажущуюся вертикаль». Современные транспортные самолеты могут иметь ускорения, соизмеримые по величине с ускорением силы тяжести, поэтому угол α отклонения маятника от вертикали может достигать значительных величин. Таким образом, физический маятник не пригоден для определения направления вертикали места, т. е. для измерения углов крена и тангажа, если самолет совершает полет с ускорением.
АВИАГОРИЗОНТЫ
Ранее было отмечено, что маятник может быть использован для определения вертикали только при полете без ускорений, а свободный трехстепенный гироскоп может выдерживать заданное пространственное положение вне зависимости от действующих ускорений только небольшое время.
Поэтому эти два устройства соединяют вместе, используя положительные свойства каждого. При отсутствии ускорений с помощью маятника главная ось гироскопа выставляется вертикально. В те моменты, когда на маятник действуют ускорения, его отключают и гироскоп работает в режиме «памяти».

Устройство, с помощью которого маятник действует на гироскоп, называется системой маятниковой коррекции. Гироскоп с такой коррекцией называют гировертикалью. Гировертикаль, визуально показывающая положение самолета относительно земного горизонта, называется авиагоризонтом.
В авиагоризонтах используется электролитический маятник (рис. 4.2), представляющий собой плоскую медную чашу 3, заполненную токопроводящей жидкостью 1 с большим удельным электрическим сопротивлением. Жидкости в чаше столько, что остается место для воздушного пузырька 2. Чаша закрыта крышкой из изоляционного материала, в которую вмонтировано четыре контакта 4, пятым контактом является сама чаша. Если маятник расположен горизонтально, то все четыре контакта равномерно перекрываются жидкостью и электрическое сопротивление участков между ними и чашей одинаково. Если же чаша наклонится, то пузырек воздуха, занимая верхнее положение в чаше, оголит один из контактов и тем самым изменит электрическое сопротивление участка, которое при малых углах (до 30') пропорционально углу наклона чаши.
 Контакты маятника включаются в электрическую цепь, как показано на рис. 4.3. При наклоне маятника сопротивление между контактами 0 и 1 будет больше, чем сопротивление между контактами 0 и 3. Тогда ток i 1который проходит по управляющей обмотке OY1, будет меньше тока i 2обмотки OY2 коррекционного двигателя. Обмотки OY1 и OY2 намотаны встречно, поэтому разностный ток Δ i = i 2— i 1создает магнитный поток, который, взаимодействуя с магнитным потоком обмотки возбуждения, вызывает вращающий момент. Ротор двигателя закреплен на оси карданова подвеса, следовательно, к оси подвеса приложен момент, под действием которого гироскоп прецессирует. Прецессия гироскопа продолжается до тех пор, пока существует момент по оси карданова подвеса, а этот момент действует до установки маятника в горизонтальное положение, при котором ток i 1= i 2. Связав маятник с внутренней, рамой карданова подвеса и расположив по осям подвеса коррекционные двигатели, получаем гировертикаль с электромеханической маятниковой коррекцией (рис. 4.4). Таким образом, электролитический маятник 1, действуя на гироскоп через коррекционные двигатели 2 и 3, все время будет приводить главную ось гироскопа к положению вертикали. При отключении коррекции гироскоп будет сохранять свое прежнее положение в пространстве с точностью, определяемой его собственными ошибками, например, за счет прецессии, вызванной моментами трения по осям карданова подвеса.
Контакты маятника включаются в электрическую цепь, как показано на рис. 4.3. При наклоне маятника сопротивление между контактами 0 и 1 будет больше, чем сопротивление между контактами 0 и 3. Тогда ток i 1который проходит по управляющей обмотке OY1, будет меньше тока i 2обмотки OY2 коррекционного двигателя. Обмотки OY1 и OY2 намотаны встречно, поэтому разностный ток Δ i = i 2— i 1создает магнитный поток, который, взаимодействуя с магнитным потоком обмотки возбуждения, вызывает вращающий момент. Ротор двигателя закреплен на оси карданова подвеса, следовательно, к оси подвеса приложен момент, под действием которого гироскоп прецессирует. Прецессия гироскопа продолжается до тех пор, пока существует момент по оси карданова подвеса, а этот момент действует до установки маятника в горизонтальное положение, при котором ток i 1= i 2. Связав маятник с внутренней, рамой карданова подвеса и расположив по осям подвеса коррекционные двигатели, получаем гировертикаль с электромеханической маятниковой коррекцией (рис. 4.4). Таким образом, электролитический маятник 1, действуя на гироскоп через коррекционные двигатели 2 и 3, все время будет приводить главную ось гироскопа к положению вертикали. При отключении коррекции гироскоп будет сохранять свое прежнее положение в пространстве с точностью, определяемой его собственными ошибками, например, за счет прецессии, вызванной моментами трения по осям карданова подвеса.
Коррекционные системы различаются по типам характеристик. Коррекционной характеристикой называется закон изменения момента, развиваемого коррекционным двигателем, в зависимости от отклонения главной оси гироскопа от положения вертикали.
В авиационных приборах наибольшее распространение получила смешанная коррекционная характеристика (рис. 4.5). Область ±Δ α определяет зону нечувствительности системы. До некоторых предельных значений углов α пр,
β пр момент коррекции М кменяется пропорционально углам α и β, а затем становится постоянным.
ПОГРЕШНОСТИ ГИРОВЕРТИКАЛЕЙ
Погрешность от моментов трения в осях к а р д а и о в а п о двеса. В осях карданова подвеса неизбежно существуют моменты трения, поэтому прецессия гироскопа под действием коррекциониых моментов продолжается до тех пор, пока коррекционный момент больше момента трения. Движение гироскопа прекращается при равенстве этих моментов:

Отсюда следует, что главная ось гироскопа не дойдет до вертикального положения па углы α * и β *:

Таким образом, из-за трения в осях карданова подвеса гировертикаль имеет зону застоя, которая зависит от величины момента трения в осях карданова подвеса и, естественно, от зоны нечувствительности маятниковой коррекции (см. рис. 4.5). Чем больше удельный момент, развиваемый коррекционными двигателями, тем зона застоя меньше. Слишком большой удельный момент приводит к значительным ошибкам на вираже. Для авиагоризонтов зона застоя обычно равна 0,5—1°.
Виражная погрешность. Когда самолет совершает разворот с угловой скоростью ω, то на маятник, кроме силы тяжести mg, еще действует центробежная сила m ω2 R, и маятник устанавливается не по истинной вертикали, а по равнодействующей этих сил (рис. 4.7). На коррекционные двигатели поступают сигналы, и главная ось гироскопа устанавливается в положение кажущейся вертикали. Этот процесс происходит тем быстрее, чем больше удельные моменты kx, ky системы коррекции. Как видно из рис.3.10, на вираже в основном неверно работает система поперечной коррекции. Поэтому в современных гировертикалях и авиагоризонтах поперечная коррекция на виражах отключается специальным устройством.
Естественно, что и линейные ускорения самолета, например, при увеличении скорости, также приводят к аналогичным ошибкам. Поэтому в таких авиагоризонтах как АГД-1 отключается и продольная коррекция. При отключении коррекции гировертикаль работает в режиме «памяти». После окончания самолетом эволюции, связанных с ускорениями, система коррекции включается и приводит главную ось гироскопа в вертикальное положение, если за время работы в режиме «памяти» она отклонилась.
Появляется ошибка у гировертикалей и за счет суточного вращения Земли и за счет собственной скорости полета самолета, однако для транспортных самолетов эта ошибка не превышает нескольких угловых минут.
зрения появится красный флажок 12. Этот переключатель соединяет обмотки управления поперечного коррекционного двигателя 4 с фазой С, минуя сопротивление R2, и тем самым увеличивает

ток в двигателе, а следовательно, и развиваемый им коррекционный момент.
После выхода прибора на номинальный режим работы переключатель 10 следует вернуть в исходное положение (флажок исчезнет из поля зрения). В номинальном режиме работы управляющие обмотки коррекционного двигателя 4 соединены с фазой С через контакты выключателя коррекции ВК-53РБ.. При совершении самолетом разворотов выключатель коррекции отключает поперечный коррекционный двигатель, в противном случае возникает большая виражная погрешность.
АВИАГОРИЗОНТ АГИ-1с
Авиагоризонт предназначен для определения положения самолета в пространстве относительно линии истинного горизонта, имеет встроенный прибор-указатель скольжения. Устанавливают авиагоризонт на транспортных самолетах гражданской авиации.
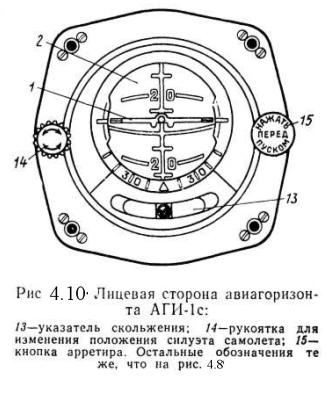
Кинематическая схема прибора изображена на рис. 4.8, упрощенная электрическая — на рис. 4.9, а вид на шкалу — на рис. 4.10.

Рассмотрим работу прибора. Собственная ось вращения гироскопа (см. рис. 4.8) по сигналам от электролитического маятника 8 с помощью коррекционных двигателей 3 и 10 устанавливается и удерживается в вертикальном положении.
Особенностью авиагоризонта АГИ-lc является способность работать в неограниченном диапазоне углов по крену и тангажу. Это возможно благодаря применению в приборе дополнительной следящей рамы 4, ось которой совпадает с продольной осью самолета, а сама рама может поворачиваться относительно самолета двигателем 11. Назначение дополнительной следящей рамы — обеспечить перпендикулярность оси собственного вращения гироскопа и оси внешней рамы карданова подвеса. При кренах самолета внешняя рама 5 карданова подвеса поворачивается вокруг оси внутренней рамы. Этот поворот фиксируется переключателем 9 (см. рис. 4.8 и 4.9), с помощью которого включается двигатель 11,поворачивающий следящую раму 4, а вмести с ней и раму 5 в противоположном направлении. Следовательно, перпендикулярность собственной оси гироскопа 6 и оси внешней рамы при этом не нарушаются. При совершении самолётом эволюций по тангажу на углы, больше 90˚, с помощью переключателя 12 изменяется направление вращения двигателя 11. Например, если самолет делает фигуру «петля Нестерова», то в момент, когда он окажется в перевернутом состоянии, т. е. изменит свое положение относительно главной оси гироскопа на 180°, направление вращения двигателя 11 для поворота следящей рамы следует изменить на противоположное.
При совершении самолетом эволюции по тангажу самолет обкатывается вокруг оси внешней рамы карданова подвеса и имеет поэтому диапазон работы 360°.
Индикация положения самолета относительно плоскости горизонта в АГИ-1с осуществляется по силуэту самолета (см. рис. 4.8 и 4.10), укрепленного на корпусе прибора, и сферической шкале 2, связанной с осью внутренней рамы 7 карданова подвеса гироскопа. Сферическая шкала 2 окрашена в коричневый цвет выше линии горизонта и в голубой — ниже линии горизонта. На коричневом поле имеется надпись «Спуск», на голубом — «Подъем». Таким образом, при наборе высоты силуэт самолета вместе с самим самолетом переместится на голубое поле, как показано на рис. 3.18, в, так как шкала 2, связанная с гироскопом, останется неподвижной в пространстве. Следует отметить, что показания авиагоризонта АГИ-lc по тангажу противоположны показаниям АГБ-2. Это чрезвычайно важно, так как оба прибора иногда устанавливают на одном самолете.
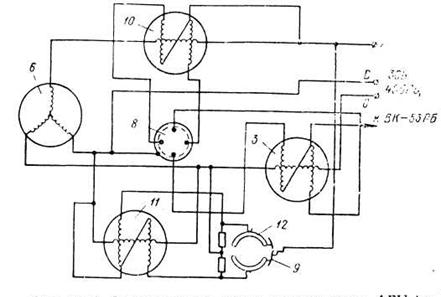
Рис 4.9 электрическая схема авиагоризонта АГИ-1.
Уменьшение времени начальной выставки оси собственного вращения гироскопа в вертикальное положение достигается последовательным включением обмоток возбуждения коррекционных двигателей 3 и 10 со статорными обмотками гиромотора. Кроме того, на внутренней раме 7 имеется механический маятник, который при невключенном приборе удерживает систему рам, примерно, в нулевом
положении. Для этой же цели служит механический арретир, при нажатии кнопки 15 которого (см. рис. 4.10) дополнительная следящая рама устанавливается в нулевое положение. На кнопке имеется надпись «Перед пуском нажать». С целью уменьшения виражной погрешности авиагоризонта поперечный коррекционный двигатель 3 на вираже отключается выключателем коррекции ВК-53РБ. На лицевой стороне прибора, внизу, расположен указатель скольжения 13 и слева — рукоятка 14 для изменения положения силуэта самолета.
АВИАГОРИЗОНТ АГД-1
Авиагоризонт дистанционный АГД-1 обеспечивает экипаж легковоспринимаемой крупномасштабной индикацией положения самолета относительно плоскости истинного горизонта и
 выдает потребителям (автопилот, курсовая система, радиолокационные станции) электрические сигналы, пропорциональные отклонениям самолета по крену и тангажу.
выдает потребителям (автопилот, курсовая система, радиолокационные станции) электрические сигналы, пропорциональные отклонениям самолета по крену и тангажу.
АГД-1 состоит из двух приборов: 1) трехстепенного гироскопа с маятниковой коррекцией, называемого гиродатчиком, который устанавливают возможно ближе к центру тяжести самолета; 2) указателей, помещаемых на приборных досках экипажа. К одному гиродатчику может быть подключено до трех указателей.
Принципиальная электромеханическая схема АГД-1 представлена на рис. 4.12, вид на шкалу указателя изображен на рис. 4.13

Рис 4.13 лицевая сторона авиагоризонта АГД-1.
36-кнопка арретир, 37- лампа, остальные обозначения такие же кА на 4.12.
Гиродатчик представляет собой трехстепенный гироскоп, ось внешней рамы карданова подвеса которого крепится в следящей раме 7. Назначение следящей рамы — обеспечить работу прибора по крену в неограниченном диапазоне углов. Следящая рама 7 обеспечивает перпендикулярность оси собственного вращения гироскопа оси внешней рамы подвеса с помощью индукционного дат-
чика 3 и двигателя-генератора 2, управляемого усилителем 1. Якорь 5 датчика закреплен на оси внутренней рамы, а статор 3 жестко связан с внешней рамкой 8 карданова подвеса.
Коммутатор 4 изменяет направление вращения двигателя 2, когда самолет совершает эволюции по тангажу с углами более 90°. Таким образом, следящая рама 7 выполняет те же функции, что и в авиагоризонте АГИ-1с.
Особенностью следящей системы отработки рамы 7 по крену в авиагоризонте АГД-1 является применение усилителя на полупроводниковых элементах и двигателя-генератора. Маятниковая коррекция АГД-1 аналогична коррекции АГИ-lc и АГБ-2, но отличается тем, что двигатель поперечной коррекции 6 отключается не только переключателем 17, который управляется выключателем коррекции ВК-53РБ, но и специальным ламельным устройством (на схеме не показано) при кренах 8—10°. Кроме того, коррекционный двигатель продольной коррекции 10 управляется электролитическим маятником 13 через жидкостный акселерометр 16. Он представляет собой устройство, аналогичное жидкостному маятнику. При продольных ускорениях самолета токопроводящая жидкость под действием инерционных сил смещается к одному из контактов и за счет увеличения электрического сопротивления цепи коррекция ослабляется на 50%.
Отклонения самолета по крену и тангажу замеряются гиродатчиком и передаются на указатель двумя идентичными следящими системами:
1) следящей системой по крену, которая состоит из сельсина-датчика 9, сельсина-приемника 20, усилителя 18 и двигателя-генератора 19;
2) следящей системой по тангажу, куда входят: сельсин-датчик 14, сельсин-приемник 23, усилитель 24, двигатель-генератор 25.
Коммутатор 15 включается в следящую систему по тангажу для ее правильной работы при угле более 90°. Особенностью следящих систем в АГД-1 является использование в них в качестве исполнительных устройств двигателей-генераторов. Двигатель-генератор представляет собой электрическую машину, состоящую из двигателя и генератора, укрепленных на одном валу. Напряжение, вырабатываемое в генераторе, пропорционально скорости вращения двигателя. Оно в следящей системе служит сигналом скоростной обратной связи для демпфирования колебаний системы. Двигатель-генератор 19 поворачивает шестерню 21 с силуэтом самолета 22 относительно корпуса прибора, а двигатель-генератор 25 вращает шкалу тангажа 26,
имеющую двухцветную окраску: выше линии горизонта — голубой цвет, ниже — коричневый. Таким образом, индикация показаний осуществляется по подвижному силуэту самолета и подвижной шкале тангажа.
Индикация положения самолета относительно плоскости горизонта в АГД-1 естественная, т. е. соответствующая тому образу, который представляет себе экипаж о положении самолета относительно земли. Грубый отсчет крена возможен по оцифрованной неподвижной шкале на корпусе прибора и силуэту самолета; по шкале 26 и силуэту самолета ориентировочно определяют углы тангажа. Индикация указателя АГД-1 по крену и тангажу представлена на рис. 4.11. По нашему мнению, определение положения самолета в АГД-1 удобнее, чем в АГБ-2 и АГИ-1с.
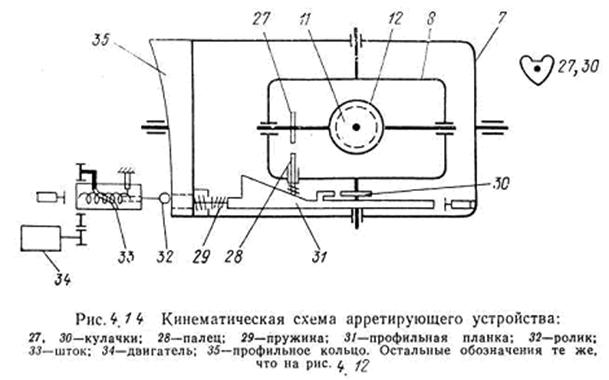
В авиагоризонте АГД-1 применено специальное устройство, называемое арретиром, которое позволяет быстро привести рамы прибора и гиромотор в строго определенное положение относительно корпуса прибора и, следовательно, самолета. Кинематическая схема электромеханического дистанционного арретирующего устройства АГД-1 изображена на рис. 4.14.
Устройство работает следующим образом. При нажатии красной кнопки 36 (см. рис. 4.13), находящейся на лицевой стороне указателя, подается напряжение на двигатель 34 (см. рис. 4.14. который, вращаясь, заставляет поступательно перемещаться шток 33 с помощью пальца, двигающегося по винтовой прорези, т.е вращающаяся гайка неподвижна, а винт перемещается. Шток 33 через ролик 32 упирается в дополнительную следящую раму 7, имеющую кольцо 35 клиновидного профиля.
За счет такого профиля кольца при давлении на раму со стороны штока кольцо 35 вместе с гироузлом поворачивается вокруг оси рамы 7 до положения, пока ролик 32 не окажется в нижнем положении кольца. При этом плоскость рамы 7 параллельна плоскости крыльев самолета. Далее шток 33 перемещает профильную планку 31, которая упирается в кулачок 30 и создает момент вокруг оси внешней рамы 8. Под действием этого момента гироскоп прецессирует вокруг оси внутренней рамы и доходит до упора, после чего прецессия прекращается, и гироскоп начинает поворачиваться вокруг оси внешней рамы до тех пор, пока выступ планки 31 не войдет в вырез кулачка 30, зафиксировав таким образом раму 8 в положении, при котором ось внутренней рамы параллельна продольной оси самолета.
Одновременно с этим палец 28, упираясь в кулачок 27, устанавливает внутреннюю раму 12 в положение, при котором ось собственного вращения гироскопа перпендикулярна осям внешней и внутренней рам карданова подвеса. Затем шток 33 под действием возвратной пружины, имеющейся в нем, откидывается в исходное положение и дает возможность планке 31 освободить кулачки 27 и 30.
Таким образом, арретир, установив рамки гироузла в определенное положение, сразу же освобождает их. Если арретирование производится на земле, когда самолет стоит горизонтально, или в горизонтальном полете, то собственная ось вращения гироскопа устанавливается по направлению вертикали места. Осуществлять арретирование следует только в горизонтальном полете, о чем напоминает экипажу надпись на кнопке 36 «Арретировать в горизонтальном полете».
Если произвести арретирование, например при крене, то при переходе в горизонтальный полет авиагоризонт будет показывать ложный крен. Правда, под действием маятниковой коррекции собственная ось гироскопа установится в вертикальное положение, и, естественно, ложные показания исчезнут, но на это уйдет время, достаточное, чтобы экипаж мог совершить ошибки в пилотировании. Следует отметить, что электрическая схема арретирования устроена таким образом, что при включении АГД-1 под напряжение арретирование происходит автоматически, без нажатия кнопки. При повторном арретировании, например при временном нарушении электропитания АГД-1, нажатие кнопки 36 обязательно, но только при горизонтальном полете.
На лицевой стороне указателя имеется сигнальная лампа 37 (см. рис. 4.13), которая загорается, во-первых, если происходит процесс арретирования и, во-вторых, при неисправностях в цепях питания гиромотора и постоянного тока ±27 В.
АВИАГОРИЗОНТ АГБ-3 (АГБ-Зк)
Основное назначение авиагоризонта АГБ-3 — обеспечить экипаж легко воспринимаемой крупномасштабной индикацией положения самолета или вертолета по углам крена и тангажа относительно плоскости истинного горизонта. Кроме того, авиагоризонт позволяет выдавать электрические сигналы, пропорциональные углам крена и тангажа, внешним потребителям, имеющимся на самолете и вертолете (автопилот, курсовая система и т. д.).

Авиагоризонт АГБ-Зк — модификация авиагоризонта АГБ-3,. отличается лишь наличием встроенной арматуры красного подсвета для освещения лицевой части прибора и окраской элементов: индикации.
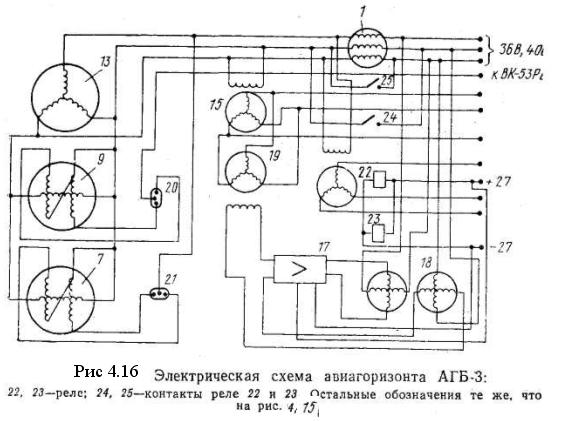
Электромеханическая схема авиагоризонта АГБ-3 представлена на рис. 4.15, электрическая схема — на рис. 4.16, а вид на его шкалу — на рис. 4.17. Собственная ось гироскопа приводится в вертикальное положение системой маятниковой коррекции, в которую входят два электролитических маятника 20 и 21, управляющие коррекционными двигателями 7 и 9. В АГБ-3 используются однокоординатные: электролитические маятники, работающие на том же принципе, что и двух координатные, которые применяются в АГБ-2, АГИ-lc и АГД-1. В однокоординатном маятнике три контакта, и он реагирует на наклоны только в одном направлении. В цепи поперечной коррекции имеется контакт 16 выключателя коррекции ВК-53РБ, который разрывает цепь при совершении самолетом разворотов, уменьшая виражную погрешность.
Время готовности прибора к работе в авиагоризонте сокращают механическим арретиром (на рис. 4.15 он не показан). Если самолет находится в горизонтальном положении, то арретир устанавливает рамки гироузла в исходное состояние, при котором главная ось гироскопа совпадает с вертикалью места. Арретиром пользуются перед запуском прибора, когда по тем или иным причинам необходимо быстро привести рамы прибора в исходное положение. Арретир в АГБ-3 нажимного типа, т. е. для его работы необходимо нажать кнопку 26 (см. рис. 4.17) до отказа. Рамки автоматически освобождаются от арретира при отпускании кнопки.
Работа арретирующего устройства аналогична работе арретира в авиагоризонте АГД-1. В авиагоризонте АГБ-3 арретир механический.
Для обеспечения потребителей сигналами отклонения самолета по крену и тангажу на оси внешней рамы карданова подвеса установлен сельсин-датчик 14 (см. рис. 4.15, 4.16), а на оси внутренней рамы — сельсин-датчик 15.
 На самолете авиагоризонт установлен таким образом, что ось
На самолете авиагоризонт установлен таким образом, что ось
внешней рамы 8 (см. рис. 4.15) направлена параллельно продольной оси самолета. Это обеспечивает работу прибора по крену в диапазоне углов 360°.

Ось внутренней рамы карданова подвеса параллельна в начальный момент поперечной оси самолета. Поскольку дополнительной
следящей рамы в AГБ-3 нет, как у АГИ-lc и АГД-1, то рабочий диапазон по тангажу в этом авиагоризонте ограничен углами ±80°. Действительно, если самолет будет иметь угол тангажа 90°, то ось внешней рамы совместится с осью собственного вращения гироскопа. Гироскоп, потеряв одну степень свободы, становится неустойчивым. Однако для обеспечения экипажа верной индикацией о положении самолета относительно плоскости горизонта в перевернутом состоянии (например, при выполнении фигуры «петля Нестерова») в приборе применены упоры 10 и 11 (см. рис 4.15). При выполнении сложных эволюции самолетом с углом тангажа более 80° упор 10, расположенный на внешней раме, начнет давить на упор 11, укрепленный на оси внутренней рамы. При этом создается момент вокруг оси внутренней рамы. По закону прецессии гироскоп под действием этого момента прецессирует, т. е. поворачивается вокруг оси внешней рамы, стремясь совместить ось собственного вращения с осью приложения момента по кратчайшему расстоянию. Таким образом, внешняя рама карданова под. веса поворачивается на 180°. Когда угол тангажа будет более 90°, упор 11 отойдет от упора 10, прецессия прекратится, а силуэт самолета 4 окажется перевернутым на 180° относительно шкалы тангажа 3, что укажет перевернутое положение самолета на 180 относительно плоскости горизонта.

Индикация положения самолета относительно плоскости горизонта в АГБ-3 осуществляется следующим образом. При кренах корпус прибора вместе с самолетом поворачивается вокруг оси внешней рамы на угол крена, так как собственная ось вращения гироскопа сохраняет вертикальное направление. Силуэт самолета 4 при этом участвует в двух движениях:1) переносном — вместе с корпусом прибора на угол крена у (рис. 4.18) и 2) вращательном (трибка 6 обкатывает неподвижную по крену трибку 5) на тот же угол Y- В результате этих двух движений силуэт самолета в пространстве поворачивается на двойной угол крена самолета. Экипаж же наблюдает угол крена по движению силуэта самолета 4 относительно шкалы 3. При этом силуэт поворачивается на естественный угол крена в том же направлении, что и самолет.
Отсчет углов крена грубо может быть произведен по шкале 27 на корпусе прибора, а углов тангажа — по шкале 3 и силуэту самолета 4. Шкала тангажа следует за углами тангажа самолета благодаря следящей системе, в которую входят сельсин-датчик 15, расположенный на внутренней оси карданова подвеса, сельсин-приемник 19, усилитель 17 и двигатель-генератор 18. В прорези шкалы.3 проходит ось, на которой за креплен силуэт самолета.
Таким образом, показания в АГБ-3 по крену и тангажу получаются естественными и идентичными показаниям АГД-1 (см. рис. 4.11).
АГБ-3 имеет схему сигнализации отказа в цепях питания прибора, содержащую следующие элементы: двигатель отказа питания 1 с флажком 2 (см. рис. 4.15 и 4.16) и два реле 22 и 23. Обмотки двигателя 1 включены последовательно с обмотками статора гиромотора 13. При исправных цепях переменного тока 36 В по обмоткам двигателя протекают токи гиромотора и сельсинов-датчиков 14 и 15.
В результате этого возникает вращающий момент на валу двигателя 1, под воздействием которого флажок 2 сигнализатора, укрепленный на валу двигателя, убирается из видимой зоны лицевой части прибора.
Если в цепи питания гиромотора отсутствует напряжение переменного тока или произошел обрыв фазы, то момент двигателя резко падает и под воздействием пружины флажок выбрасывается в видимую зону лицевой части прибора.
Реле 22 и 23 включаются параллельно цепи питания усилителя следящей системы тангажа. При отсутствии напряжения 27 В постоянного тока контакты 24 и 25 этих реле замыкаются, шунтируя две фазы обмоток двигателя 1, следовательно, его момент уменьшается, и пружина выбрасывает флажок 2, который сигнализирует об отказе питания.
Таким образом, обрыв в цепи с напряжением 36 В, частотой 400 Гц или в цепи с напряжением 27 В, а также отсутствие одного из этих видов электропитания можно определить по наличию в поле зрения шкалы прибора флажка сигнализатора.
АВИАГОРИЗОНТ АГК-47Б
Авиагоризонт комбинированный, так как в одном корпусе смонтированы три прибора: авиагоризонт, указатель поворота и указатель скольжения.
Назначение авиагоризонта — обеспечение экипажа информацией о положении самолета относительно плоскости горизонта. Указатель поворота служит для определения направления разворота самолета, а указатель скольжения измеряет скольжение. Указатель поворота рассмотрен в разд. 4.2, а указатель скольжения — в разд. 3.11. Упрощенные кинематическая, электрическая схемы и лицевая сторона авиагоризонта представлены на рис. 4.19, 4.20, 4.21; все обозначения на рисунках одинаковые.

Собственная ось вращения гироскопа 7 (см. рис. 4.19, 4.20) приводится в вертикальное положение с помощью маятниковой системы коррекции, куда входят электролитический маятник,,/6 и два соленоида 13 и 14, Соленоид 13 располагается перпендикулярно внешней оси у карданова подвеса, а соленоид 14 — перпендикулярно внутренней оси х карданова подвеса на внутренней раме 6, выполненной в виде кожуха. Каждый из соленоидов имеет по две обмотки, создающих при прохождении по ним токов магнитные поля противоположного направления. В соленоидах имеются металлические сердечники, которые имеют возможность перемещаться внутри соленоидов. Если собственная ось вращения гироскопа совпадает с направлением местной вертикали, то с электролитического маятника на обмотки соленоидов поступают одинаковые сигналы и сердечники находясь в среднем положении, не создают моментов вокруг осей карданова подвеса. При отклонении главной оси гироскопа от вертикального направления токи, протекающие по обмоткам соленоидов, будут не равны вследствие неодинаковых сопротивлений между контактами электролитического маятника. Это приведет к перемещению сердечников в соленоидах, и за счет их веса вокруг осей карданова подвеса возникнут моменты, которые возвратят ось собственного вращения гироскопа к вертикальному положению. Так соленоид 14 участвует в создании момента вокруг внутренней оси карданова подвеса, а соленоид 13 — вокруг внешней оси подвеса.

Внешняя ось карданова подвеса авиагоризонта параллельна поперечной оси самолета, поэтому индикация тангажа осуществляется по круговой шкале 4, связанной с внешней рамой карданова подвеса 5, и линии горизонта, связанной с корпусом прибора. При пикировании или кабрировании линия горизонта перемещается относительно неподвижной шкалы — пилоту картина представляется обратной: силуэт самолета 1 вместе со шкалой 4 опускается или поднимается относительно линии горизонта. Индикация крена осуществляется по относительному положению силуэта самолета /, связанного с внутренней рамой карданова подвеса, и шкалы 3, закрепленной на внешней раме карданова подвеса. Для того чтобы индикация крена была естественной, т. е. силуэток самолета имитировал крен относительно плоскости горизонта, так же как и в АГБ-3, в АГК.-47Б применена пара шестерен с передаточным отношением 1:1. Шкала тангажа имеет оцифровку через 20°, а шкала крена имеет разметку через 15°. Индикация крена и тангажа у АГК-47Б при эволюциях самолета представлена на рис. 4.11.

В авиагоризонте имеется механический арретир фиксированного типа, т. е. если в АГБ-3 и АГД-1 арретир работает только тогда, когда нажата кнопка, то в АГК-47Б имеется возможность, выдвинув шток арретира 20 (рис. 4.21) на себя, зафиксировать его в этом положении. При арретированном приборе на лицевой стороне прибора появляется красный флажок с надписью «Арретир». Когда прибор заарретирован, ось собственного вращения гироскопа совпадает с вертикальной осью самолета, а оси у и x совпадают соответственно с продольной и поперечной осями самолета. На рукоятке управления арретиром написано «Арретир тянуть».
С помощью кремальеры 22 можно в некоторых пределах изменять положение линии искусственного горизонта относительно корпуса прибора, что иногда целесообразно делать для удобства выдерживания траектории полета по тангажу, при длительном негоризонтальном полете.
Как и всякий авиагоризонт, АГК-47Б подвержен виражной ошибке, но ввиду того, что он предназначен для установки на легкомоторные самолеты, где может не быть выключателя коррекции, отключение коррекции в нем не производится. В то же время для уменьшения ошибки при левом вираже прибор сконструирован таким образом, что нормальным положением оси собственного вращения является ее наклоненное положение вперед, по полету, на 2°. Уменьшение ошибки именно для левого виража, вероятно, можно объяснить тем, что самолеты чаще совершают левые виражи, поскольку командир само лета сидит в кабине на левом кресле. Действительно, при левом вираже электролитический маятник будет показывать кажущуюся вертикаль, которая отклоняется внутрь виража на угол
 (4.3)
(4.3)
где ω — угловая скорость виража; V — скорость полета самолета; g — ускорение силы тяжести.
Под действием системы поперечной коррекции с помощью соленоида 13 гироскоп начнет прецессировать в сторону кажущейся вертикали со скоростью

В то же время при развороте конец собственной оси вращения гироскопа будет разворачиваться вокруг положения истинной вертикали со скоростью
 (4.5)
(4.5)
где α0 — начальный угол наклона оси собственного вращения гироскопа вперед (рис. 4.22), направленной в противоположную сторону, так как гироскоп стремится сохранить положение оси собственного вращения в пространстве неизменным. Направление скорости ωγ противоположно направлению скорости прецессии гироскопа β.

Очевидно, для того чтобы при левом вираже не было ошибки, необходимо выполнение условия
 (4.6)
(4.6)
или для небольших углов β0 (4.6) можно записать
 (4.7)
(4.7)
откуда
 (4.8)
(4.8)
Зная Ку авиагоризонта и наиболее употребительные скорости, при которых происходит разворот, можно определить необходимый угол α0 наклона оси гироскопа.
АВИАГОРИЗОНТ АГР-144
Авиагоризонт АГР-144 является комбинированным прибором; в нем смонтированы три прибора: авиагоризонт, указатель поворота и указатель скольжения.
Назначение авиагоризонта —обеспечение экипажа информацией о положении самолета относительно плоскости горизонта Указатель поворота служит для определения наличия и направления разворота самолета вокруг его вертикальной оси. Указатель скольжения измеряет скольжение самолета. Кроме того, при координирован






