иметь представление: о назначении неразъемных соединений; об оценке сварных, клеевых и клепаных соединений; о стандартных крепежных изделиях и видах резьбовых соединений; о типах шпоночных соединений и сравнительной оценке шпоночных и шлицевых соединений;
знать: виды сварных швов и сварных соединений; виды резьбовых соединений и способы стопорения; основы расчета на прочность при постоянной нагрузке;
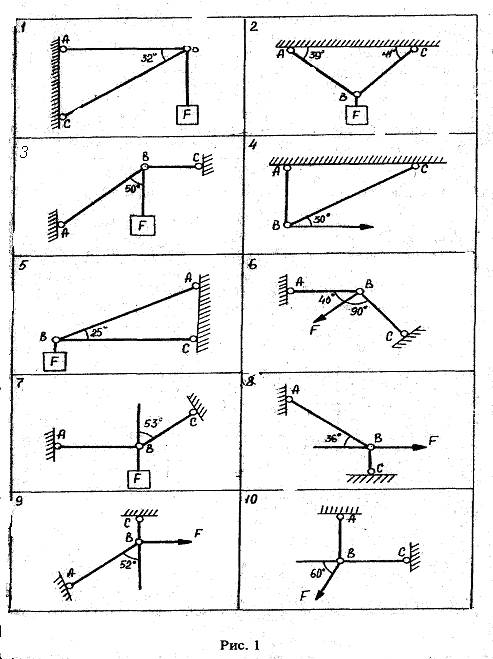
Задание 1.1. Определить недостающие из сил FАВ, FВС, F в механической системе на рис.1 Исходные данные приведены в табл. 1.1.
Таблица 1.1.
Номер схемы на рис.1
F,
кН
FАБ,
кН
FСВ,
кН
Вариант
0,5
0,4
0,3
0,6
0,5
0,4
0,7
0,6
0,4
0,8
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению задания 1.1.
К решению задачи следует приступать после изучения тем 1.1. «Основные понятия и аксиомы статики» и 1.2. «Система сходящихся сил» (см. «Содержание дисциплины»), уяснения приведенных ниже методических указаний и разбора примеров.
В предлагаемой задаче рассматривается тело (точка), находящееся в равновесии под действием плоской системы сходящихся сил. При аналитическом методе решения применяется система двух уравнений равновесия.
∑Fх=0; ∑Fу=0,
(сумма проекций сил системы на каждую из координатных осей равна нулю).
Проекцией силы на ось называется отрезок оси, заключенный между перпендикулярами, опущенными на ось из начала и конца силы.
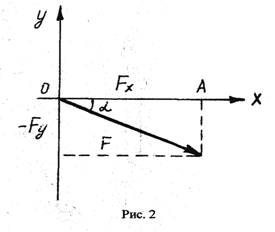
Обозначив проекцию силы F на ось Х через Fх, а на ось У – через Fу, будем иметь (рис.2.):
Fх=Fcosα; Fу=-Fsinα, или Fу=-Fcos(90-α)
α – угол, образованный силой F и осью Х.
Можно упростить решение задач путем рационального выбора направления координатных осей, то есть выбираем ось так, чтобы одна из осей (ось Х или ось У) совпадала с направлением какой-либо неизвестной силы.
Решив задачу аналитическим методом, следует затем проверить правильность решения с помощью графического или геометрического метода.
В международной системе единиц сила измеряется в ньютонах (Н), а также в кратных единицах – килоньютонах (1кН=103Н) и меганьютонах (1МН=106Н).
При решении задача на равновесие плоской системы сходящихся сил рекомендуется придерживаться общей для всех систем схемы:
1. Разделить все детали механизма на три группы – освобождаемое от связей тело, действующие тела и связи. Освобождаемым является тело, движение которого рассматривается в задаче, действующие – тела, вызывающие движение, связи – противодействующие движению освобождаемого тела.
2. Мысленно отбросить действующие тела и связи.
3. Заменить их векторами активных сил и «реакций связей», приложенных к освобожденному телу.
4. Составить уравнения равновесия и найти неизвестные силы. Для этого предварительно векторы сил помещают в поле координатных осей так, чтобы векторы исходили из точки пересечения осей.
5. Проверить правильность решения с помощью графического способа.
Пример 1.1. Определить недостающие из сил:
Реакцию стержня FСВ и силу груза F, если реакция стержня FАВ=6кН.
Рис.3
Решение
1. Механизм (рис.3) состоит из стержней АВ, ВС, соединенных шарниром В, который вертикальной тягой связан с грузом F.
Так как тяга груза F, стержни АВ и СВ связаны с одним телом – шарниром В, то освобождаем от связей шарнир В.
2. Отбрасываем тягу, стержни.
3. Из точки (шарнир В) направляем активную силу тяги F – вертикально вниз, реакцию стержня FСВ – горизонтально влево, реакцию стержня FАВ – под углом 200 к горизонту (как стержень ВС) стрелкой влево – вверх (рис.4а).
3. Из точки (шарнир В) направляем активную силу тяги F – вертикально вниз, реакцию стержня FСВ – горизонтально влево – вверх. (рис.4а).
Направление реакций связей принимается произвольно. Правильность выбранного направления определяется знаком модуля реакции: признаке «-» истинное направление реакции противоположно выбранному.
4. Точку В помещаем в начало осей координат, ось Х проводим совпадающей с вектором FВС, вторую У – перпендикулярно (рис.4а).
Рис.4а,б
Составляет уравнение равновесия
∑FХ=0; -FАВ∙cosα-FСВ=0;
∑Fу=0; FАВ∙sinα-F=0
Решаем уравнения
FСВ=-FАВ∙cosα=-6∙cos200=-6∙0,94=-5,64кН.
F=FАВ∙sinα=6∙sin200=6∙0,34=2,04кН.
Данная система находится в состоянии равновесия, если соотношение параметров (сил) будет таково: F=2,04кН, FАВ=6кН, FСВ=5,64кН.
Сила FСВ должна действовать в противоположном от заданного направления, так как ее значение получилось отрицательным.
5. Для проверки правильности решения применяем графический метод, в выбранном масштабе М 1кН:1см, строим замкнутый силовой треугольник (рис.4б).
Следует отметить, что векторный треугольник показывает действительное, а не предполагаемое направление искомых сил.
Задание 1.2
Определить реакции опор двухопорной балки. Данные взять из табл. 1.2. рис.5
Таблица 1.2.
Вариант
№ схемы на рис.5
q
H |м
F,Н
М,
Н∙м
Вариант
№ схемы на рис. 5
q
Н/ м
F. Н
М,
Н м
4,5
1,5
2,5
3,5
4,5
1,5
2,5
4,5
3,5
4,5
3,5
0,5
1,5
2,5
4,5
5,5
8,5
6,5
2,5
1,5
1,5
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к решению задания 1.2
К решению этих задач следует приступать после изучения тем «Пара сил и момент силы», «Система сил, произвольно расположенных в плоскости (см. «Содержание дисциплины).
Пара сил. Две равные параллельные силы, направленные в противоположные стороны и не лежащие на одной прямой, называются парой сил или просто парой (рис. 6а). Кратчайшие расстояния между линиями действия сил, составляющих пару, называются плечом пары (рис.6б).
Произведение одной из сил пары на плечо называется моментом пары и обозначается буквой М; М=±F∙r.
Момент пары сил будем считать положительным, если пара стремится повернуть тело по часовой стрелке и отрицательным, если против часовой стрелки (рис.6). Размерность пары (Н∙м, кН∙м). Чтобы задать пару, достаточно задать ее момент, поэтому иногда слово «пара» заменяют словом «момент» и условно изображают его так, как показано на рис.6в.
Момент силы относительно точки. В некоторых механизмах выявить пару сил затруднительно, поэтому вращательное действие определяют с помощью момента силы относительно точки (центра) вращения. Момент силы относительно точки определяется как произведение вращающей силы на плечо. Плечом называют расстояние – перпендикуляр от точки – центра вращения до вектора вращающей силы.
При определении момента силы F1 относительно точки 0, надо умножить вращающую силу F1, на плечо – перпендикуляр r1 (рис.7), то есть с учетом направления вращения М =-F1∙r1.
При определении момента силы F2, приложенной к рычагу АВ под углом α, следует взять произведение вращающей части силы F2∙cosα на плечо r2 (перпендикуляр к вращающей F2∙cosα) или произведение силы F на плечо r∙cosα- перпендикуляр к вектору вращающей силы F, т.е.
М =+F2∙cosα∙r или М =+F∙r∙сosα/
Очевидно, что для вращающихся тел-рычагов должно соблюдаться правило: рычаг в равновесии, если момент силы, поворачивающей по часовой стрелке, равен моменту силы, поворачивающей против часовой стрелки.
↓М ↓
или М , т.е. ∑М =0.
Для данного случая (рис.7) F1∙r2-F2∙cosα∙r=0
Решение
Пользуясь методом освобождения от связей:
1. Разделяем изображенную двухопорную балку на освобожденное тело, тела, вызывающие ее движение, и тела, противодействующие движению.
Освобожденным телом будем считать балку АВ, действующими – неопределенные тела с силами F, q, М, противодействующими – опоры А и В.
2. Отбрасываем связи: опоры А и В.
3. Заменяем их реакциями. Действующие, уже замененные силами, преобразуем:
а) раскладываем F на горизонтальную и вертикальную составляющие
Cила Q, очевидно, будет действовать вертикально вниз на расстоянии ВD, равном 2м (половина от 4м).
Противодействующие опоры А и В заменяем реакциями:
а) опора А – Rуа и Rха
б) опора В и Rуа (рис.9)
Пример 1.2. Определить реакцию опор двухопорной балки, нагруженной силами (рис.8)
Опора А ограничивает движение в двух взаимно перпендикулярных направлениях (Х и У). Ее реакции RуА, RхА.
Опора В – в одном (У) – реакция RВ.
4. Пользуясь уравнениями равновесия рычага относительно точек – центров вращения (опора А и В), получим
∑МА=0.
RВ∙АВ-М-Q∙АD-F∙cos300∙АС=0
RВ= ∑МВ=0
Rуа∙АВ-F∙cos300∙CВ-Q∙DВ+М=0
Rуа=
Проверяем правильность определения вертикальных реакций по условию
∑Fу=0 (см.рис.9).
Rуа-F∙cos300-Q+RВ=0.
6,62-10∙0,86-8+9,98=0
0=0
Определяем горизонтальную реакцию Rха опоры А по уравнению
∑FХ=0
Rха-F∙cos600=0
Rха=F∙cos600=10∙0,5=5кН.
Задание 1.3. Определить движущую силу и развиваемую автомобилем мощность, если масса автомобиля m1, коэффициент трения f, кпд η; время t, начальная скорость υ1, конечная υ2.
Таблица 1.3.1.
Маневр
V1
м/с
V2
м/с
t,
с
f
η
m,
кг
разгон
торможе
ние
поворот
Варианты
0,4
0,95
0,5
0,94
0,4
0,94
0,5
0,90
0,4
0,91
0,6
0,92
0,3
0,93
0,2
0,95
0,4
0,96
0,5
0,95
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к решению задания 1.3.
К выполнению этого задания студент может приступить после изучения тем 1.9. «Основные понятия и аксиомы динамики», 1.10. «Метод кинетостатики», 1.11. «Трение. Мощность».
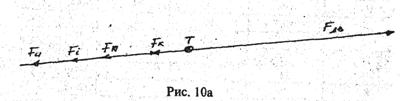
Движение трактора определяется параметрами движения: скоростью, ускорением; параметрами действия – силами: движущей Fдв, сопротивления качению Fк, сопротивления прицепа Fп, сопротивления тяжести на подъеме Fi, собственному сопротивлению – силе инерции Fи.
Приняв трактор за точку Т, изобразим векторы сил (рис.10а).
Соотношение между силами определяется уравнением равновесия сил:
∑F=0, то есть Fдв-Fк-Fп±Fi±Fи=0.
Силы Fi, Fи, Fп могут быть со знаком «+», если они помогают Fдв (направлены с ней), или со знаком «-», если они противодействуют Fдв.
Потребная движущая сила находится из уравнения равновесия сил после определения остальных по формулам:
Сила сопротивления качению на горизонтальном участке при
Fк=fк∙Gт,
где fк – коэффициент сопротивления качению, зависящий от фона (основания, по которому движется трактор), его состояния (табл.1.3.2.), состояния колес.
Gт – вес (сила тяжести) трактора, Н.
Сила сопротивления прицепа (крюковая сила)
Fп=fк∙Gп,
здесь Gп – вес прицепа, Н.
Если прицепом является с.-х. орудие, типа плуг, культиватор, то его сопротивление определяется иначе, по формулам дисциплины «Сельскохозяйственные машины».
Сила тяжести на склоне Fi=±i∙G,
где I – синус угла наклона дороги.
Сила тяжести на склоне положительна при спуске (+i) и отрицательна при подъеме (-i).
Сила инерции прямолинейного движения Fи=±m∙а,
где m – масса трактора, прицепа; m= ,
q=9,8 – ускорение свободного падения, м/с2.
Ускорение положительно (+а) при разгоне трактора и отрицательно (-а) при торможении.
Решение задачи состоит из этапов:
1. Построение линии векторов сил с учетом знаков уклона I и ускорения а.
2. Запись уравнения равновесия в соответствии со знаками сил Fi и Fи.
3. Подстановка вместо сил Fк, Fп и т.д. их выражений.
4. Выражение неизвестной Fдв из полученной формы уравнения.
5. Постановка численных значений в соответствии с табл. 1.3.1 и 1.3.2.
Пример 3. Определить движущую силу и развиваемую автомобилем мощность, если масса автомобиля m, начальная скорость υ1, конечная скорость υ2, время t, коэффициент трения f, кпд η
m=2000кг
υ1=0 Решение
υ2=16 м/с 1. Выполним расчетную схему сил, для чего:
t=4с 1.1. Автомобиль примем за материальную точку.
f=0,2 1.2. Приложим к нему активные силы – движущие
η=0,8 силу и силу тяжести ;
Fдв-?Р-? 1.3. приложим реактивные силы – силу трения
и нормальную реакцию плоскости .
2. Показав направление ускорения , условно приложим силу инерции .
3. Уравнение по принципу Даламбера в векторной форме:
∑
4. Выбрав оси координат спроектируем на 0х и 0у:
0х: Fдв-Fтр-Fин=0,
0у: Rп-G=0
6. Решим их относительно неизвестных.
Сила тяжести G=mq=2000∙9,81=19620Н
Нормальная реакция плоскости Rп=G=19620Н.
Из основного закона трения сила трения Fтр=f∙Rп=0,2∙19620=3924Н.
Сила инерции Fин=m∙а;
ускорение а= Fин=2000∙4=8000Н.
Движущая сила Fдв=Fтр+Fин=3924+8000=11924Н.
6. Мощность на передвижение: Р=Fдв∙υ=11924∙16=190784Вт=190,784кВт.
С учетом КПД Рполн=
Задание 1.4. Определить параметры привода: угловые скорости, вращающие моменты, мощности на валах, передаточные отношения, КПД. Описать назначение, принцип работы, устройство привода. Данные взять из таблицы 1.4.
Таблица 1,4
№ варианта
№ схемы по рис. 11
Мощность эл. дв.Р1, кВт
Частота вращ.. электродв. n об/мин
Перед. число ред..uр
№ варианта
№ схемы по рис. 11
Мощность эл. дв. Р1,
кВт
Частота вращ.электродв. n, об/ мин
Перед. число. ред. uр
8,5
2,0
3,0
1,6
3,2
3,15
7,2
1,25
4,0
2,5
8,3
3,5
3,15
9,6
2,5
3,6
2,2
1,9
12,5
3,5
2,8
3,8
2,6
8,0
3,3
3,15
5,1
2,5
3,0
3,0
4,7
4,6
95,5
1,25
3,6
6,9
2,5
2,0
5,3
3,15
6,4
1,6
4,7
8,5
8,9
9,8
1,25
3,2
4,4
1,6
5,6
2,5
8,6
6,1
3,7
7,6
3,2
2,5
8,8
2,8
2,6
1,25
6,6
3,15
2,1
5,0
2,9
1,6
4,5
2,4
3,15
2,6
1,6
5,5
2,8
2,4
4,2
2,5
4,6
3,8
4,0
3,15
3,2
31,5
2,3
4,6
4,8
2,5
6,2
3.5
5,6
1,6
2,4
3,15
4,6
8,5
2,6
2,5
8.0
2,7
3,15
3,4
2,5
3,2
1,25
4,9
4,8
2,0
3,9
2,8
2,8
2,5
2,5
6,0
2,5
2,8
3,15
3,6
4,4
5,4
5,8
1,25
3,3
6,3
1,6
4,5
3,15
2,0
2,5
4.4
2,5
5,0
3.6
3,15
3,4
3.4
2,8
3.0
2,5
4,9
4.0
3,5
2,8
8.4
5,6
2,5
3.9
2,4
3,7
3,15
2,4
2,8
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к решению задания 1.4.
Механические передачи чаще всего передают вращательное движение, изменяют направление, частоту, плоскость вращения, вращающий момент.
Частота вращения измеряется в об/мин (n) и в радианах/с (ω). Во втором случае ее еще называют угловой скоростью. Между ними существует следующая зависимость:
ω=
Имеется ввиду, что в одном обороте 2π=6,28 радиан, а в одной минуте 60 секунд.
Изменение частоты вращения выражают через передаточное отношение u12.
u12=± ,
где ω1 – угловая скорость ведущего вала;
n1 – частота вращения ведущего вала;
ω2 – угловая скорость ведомого вала;
n2 – частота вращения ведомого вала.
Положительное значение принимается, если направление вращения валов меняется. Передаточное отношение зависит от размера деталей передач (зубчатых колес, шкивов и др.): большую частоту имеет меньшая деталь, меньшую частоту – большая, поэтому передаточное отношение через размеры выглядит так:
u12= ,
где Z – число зубьев зубчатого колеса, звездочки;
D – диаметр шкива зубчатого колеса, звездочки;
Для многоступенчатой передачи передаточное отношение определяется перемножением передаточных чисел ступеней
uIi=u12∙u23∙u34…u(i-l)i
Если вспомнить (задании 1.3.), что мощность Р- параметр, полученный как произведение параметра действия на параметр быстроты движения, а параметр действия при вращении – вращающий момент М и параметр быстроты вращения – угловая скорость ω, то получим
Р=М∙ω[Нм∙1/с]=
Коэффициент полезного действия η передачи показывает отношение мощности Р2 ведомого вала к мощности Р1 ведущего вала
η= ;
Потери мощности Р1 и Р2 необходимы для преодоления сопротивления в зацеплении, подшипниках, смазке, перемещений продуктов износа, смазки.
Рекомендуется при определении полезной мощности принимать следующие значения КПД, обусловленные степенью точности и чистоты обработки выпускаемых деталей.:
- пары подшипников - ηn=0,99
- цепной передачи - ηn=0,97
- ременной - ηn=0,96
- зубчатой-ηn=0,98
- червячной - ηn=0,8
Учитывая, что Р1=М1∙ω1; Р2=М2∙ω2; получим
η= и М2=М1∙u12∙η1,
а также u12=
Это значит, что изменение вращательного момента измеряется также передаточным отношением.
Коэффициент полезного действия привода, состоящего из нескольких передач (ступней), определяют произведением КПД всех передач
η=η1∙η2…ηin∙η ,
где 1,2…I – номера передач;
n – количество пар подшипников в приводе.
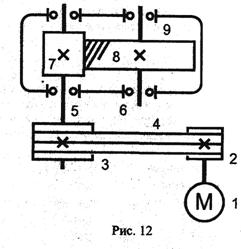
Пример 1.4. Определить угловые скорости, вращающие моменты, передаточные отношения, мощности, КПД привода (рис.12), если передаточное отношение u23=2,8, мощность электродвигателя Р1=7кВт, частота вращения его вала n1=750 об/мин, диаметры шкивов D1=80мм, D2=160мм. Описать назначение, устройство, принцип работы привода.
Решение
1. Определяем передаточное отношение ременной передачи
u12=uрn= .
Общее передаточное отношение привода
U13=u12∙u23=2∙2,8=5,6.
2. Частота вращения ведущего и ведомого вала привода
ω1=πn/30=3,14∙750/30=78,5 I/с.
u13= ; n3= об/мин.
ω1= I/с
3. Общий коэффициент полезного действия привода
η=ηрn∙ηsn∙η =0,96∙0,98∙0,992=0,93
4. Момент вращения двигателя и ведомого вала привода
Р1=М1∙ω1; М1= .
u13= ; М2=М1∙u13∙η=89,1∙5,6∙0,93=455Н∙м.
5. Мощность ведомого вала привода
η= ; Р3=Р1∙η=7000∙0,93=6510 Вт.
6. Назначение, принцип работы, устройство привода. Привод предназначен для передачи движения и усилия от электродвигателя (Р1=7кВт, n1=7000 об/мин, М1=89,1Н∙м) к ведомому валу редуктора (Р=6,5 кВт, n3=134 об/мин, М3=455Н∙м), изменения направления вращения, изменения частоты вращения в u13=5,6 раз, изменения вращающего момента в u13∙η=5,6∙0,93=5,2 раза.
Потери мощности Р1-Р3=7-6,5=0,5 кВт.
Привод устроен из электродвигателя (М), ременной и зубчатой передач.
Ременная передача передает вращение с вала двигателя на вал редуктора, изменяя частоту вращения в u12=2 раза, момент вращения в u12∙η=1,9 раз, теряя при этом Р2-Р1=7-7∙0,95=0,35кВт.
Ременная передача состоит из двух шкивов 2, 3 с диаметрами D1=80мм, D=160мм с двумя клиновыми проточками, двух клиновых ремней 4. Шкивы установлены на валы двигателя и редуктора на шпонках.
Редуктор (зубчатая передача) передает вращение с ведущего вала 5 на ведомый 6, изменяя направление вращения, частоту вращения в 2,8 раза и момент вращения в 2,7 раза.
Передача движения осуществляется за счет зацепления колес (передачи толкающего усилия зубом ведущего колеса зубу ведомого как рычагу).
Редуктор одноступенчатый состоит из пары зубчатых колес 7,8, закрепленных на валах шпонками. Валы вращаются в подшипниках качения 9, установленных в гнездах корпуса.
КОНТРОЛЬНАЯ РАБОТА 2
Задание 2.1
Проверить прочность, найти наиболее напряженный участок двухступенчатого бруса, нагруженного силами F1, F2, если [σ]=160Н/мм2. Найти удлинение бруса. Данные своего варианта взять из таблицы 2.1.







 =-F1∙r1.
=-F1∙r1.
 =+F2∙cosα∙r или М
=+F2∙cosα∙r или М  ↓
↓ , т.е. ∑М
, т.е. ∑М  =0.
=0.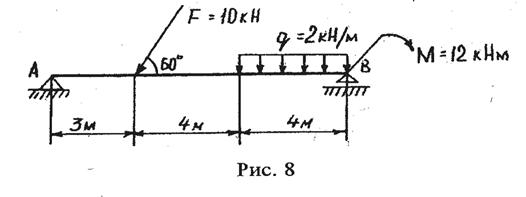

 ∑МВ=0
∑МВ=0
 ,
,

 и силу тяжести
и силу тяжести  ;
; Fдв-?Р-? 1.3. приложим реактивные силы – силу трения
Fдв-?Р-? 1.3. приложим реактивные силы – силу трения и нормальную реакцию плоскости
и нормальную реакцию плоскости  .
. , условно приложим силу инерции
, условно приложим силу инерции  .
.

 Fин=2000∙4=8000Н.
Fин=2000∙4=8000Н.


 ,
, ,
,
 ;
; и М2=М1∙u12∙η1,
и М2=М1∙u12∙η1,
 ,
,
 .
. ; n3=
; n3=  об/мин.
об/мин. I/с
I/с =0,96∙0,98∙0,992=0,93
=0,96∙0,98∙0,992=0,93 .
. ; М2=М1∙u13∙η=89,1∙5,6∙0,93=455Н∙м.
; М2=М1∙u13∙η=89,1∙5,6∙0,93=455Н∙м. ; Р3=Р1∙η=7000∙0,93=6510 Вт.
; Р3=Р1∙η=7000∙0,93=6510 Вт.

