Кинематическая схема РВГ представлена на рис.1.3.1.

Рис.1.3.1. Кинематическая схема РВГ:– ротор гироскопа; 2 – вал; 3, 7 – кольца (рамки); 4, 5, 8, 13 – упругие подвесы; 6 – привод; 9, 11 – преобразователи угла; 10, 12 – преобразователи момента
На оси двигателя приводного (24ДПМ) жестко установлен ротор (ЧЭ) гироскопа вращающийся совместно с осью двигателя с частотой вращения 250 Гц. На корпусе двигателя неподвижно приклеена залитая компаундом катушка датчика момента и датчика угла (ДУ/ДМ). Для ограничения угла прокачки ЧЭ предусмотрен упор, вращающийся совместно с ним. Снаружи гироскоп закрыт кожухом, а внутренняя полость гироскопа откачена до остаточного давления 1*10-3 мм рт.ст. Электропитание гироскопа и съем информационных сигналов осуществляется через гермовводы. На корпусе ИБ гироскоп устанавливается неподвижно с базированием на посадочный диаметр и торец корпуса двигателя приводного 1. Габаритные размеры гироскопа Æ28х42,5мм.
Принцип работы РВГ как ДУС основан на свойстве быстровращающегося физического тела (ЧЭ) совмещать вектор угловой скорости собственного вращения (вектор кинетического момента) с вектором вынужденного вращения (вектором измеряемой угловой скорости). Возникающий при этом гироскопический момент Мг является мерой действующей на РВГ угловой скорости. Функциональная блок-схема датчика представлена на рис. 1.3.2.
Функционирование датчика происходит следующим образом: при подаче на блок питания двигателя (БПД) РВГ электропитания +15В на обмотки статора ДПМ поступают два напряжения, сдвинутые по фазе на 90 градусов, создающие вращающееся магнитное поле, приводящее по истечении времени готовности в синхронное вращение ротор приводного двигателя ДПМ.
На валу двигателя установлен ЧЭ, при этом собственная частота подвеса максимально приближена к синхронной частоте ДПМ. При отсутствии угловой скорости ЧЭ вращается в плоскости исходного состояния, перпендикулярной оси вращения ДПМ. Магниты, установленные на ЧЭ, наводят сигналы в катушках ДУ, размещенных в кольцевом зазоре между магнитами. Катушки включены попарно встречно по каждой измерительной оси. Поэтому в исходном состоянии ЧЭ суммарный сигнал, индуцируемый в каждой паре катушек, равен нулю.
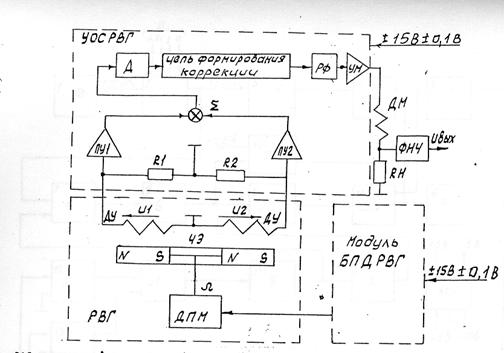
Рис. 1.3.2. Функциональная блок-схема ДУС РВГ
РВГ - роторный вибрационный гироскоп; ДПМ – двигатель приводной; ЧЭ – чувствительный элемент; БПД РВГ – блок питания двигателя РВГ (модуль); Rн – резистор нагрузочный; УОС РВГ – устройство обратной связи; ДУ – датчик угла; ДМ – датчик момента; ФНЧ – фильтр низких частот.
При действии угловой скорости ЧЭ помимо собственного вращения совершает колебания относительно оси упругого подвеса с удвоенной частотой вращения вала ДПМ, так как ЧЭ содержит две магнитные системы под углом 180 градусов. Вследствие этого в катушках дополнительно генерируются сигналы с удвоенной частотой вращения ЧЭ и амплитудой пропорциональной действующей на РВГ угловой скорости. Эти сигналы с каждой катушки поступают в устройство обратной связи - УОС. Где они подаются поканально через предусилитель на сумматор. Там суммируются, усиливаются и поступают на демодулятор. Демодуляторы 2-х каналов управляются опорным сигналом, снимаемым со средних точек катушек ДУ. Оба канала датчика идентичны, поэтому дальнейшее пояснение дается для одного канала. Демодулятор осуществляет фазочувствительное детектирование сигнала, который пройдя через цепь формирования коррекции, обеспечивающей устойчивость системы "РВГ-УОС" и необходимые динамические характеристики через режекторные фильтры, подавляющие помехи на частоте вращения ДПМ и на удвоенной (информационной) частоте, поступает на усилитель мощности. С усилителя мощности сигнал поступает на последовательно включенную катушку датчика момента ДМ и резистор нагрузки Rн.
ДМ осуществляет компенсацию гироскопического момента  , возникающего при действии измеряемой РВГ с кинетическим моментом
, возникающего при действии измеряемой РВГ с кинетическим моментом  угловой скорости
угловой скорости  . Величина гироскопического момента является мерой угловой скорости
. Величина гироскопического момента является мерой угловой скорости
 .
.
Гироскопический момент уравновешивается моментом, создаваемым ДМ
 ,
,
где  - ток, протекающий через ДМ,
- ток, протекающий через ДМ,  - крутизна характеристики ДМ.
- крутизна характеристики ДМ.
Исходя из сказанного
 .
.
Так как и величины постоянные, то измеряемая угловая скорость пропорциональна току через ДМ. Ток, проходя через резистор нагрузки Rн, создает выходное напряжение.
Для дополнительного подавления помех выходное напряжение фильтруется через ФНЧ. Переменная составляющая на выходе датчика (уровень шумов) не превышает 10мВ. Крутизна выходного сигнала по постоянному напряжению (номинал) -
Кн=88,9 мВ/градус/c.
БПД РВГ выполнен в виде герметичной микросборки 1 размерами 39,5х59,5х7,2 мм без учета выводных проводников. Микросборка распаивается на плате 2, на которой устанавливаются также регулировочные элементы 3.






