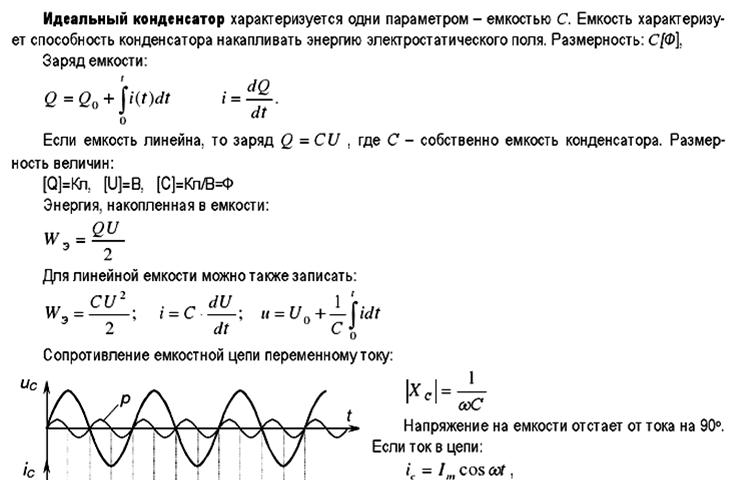
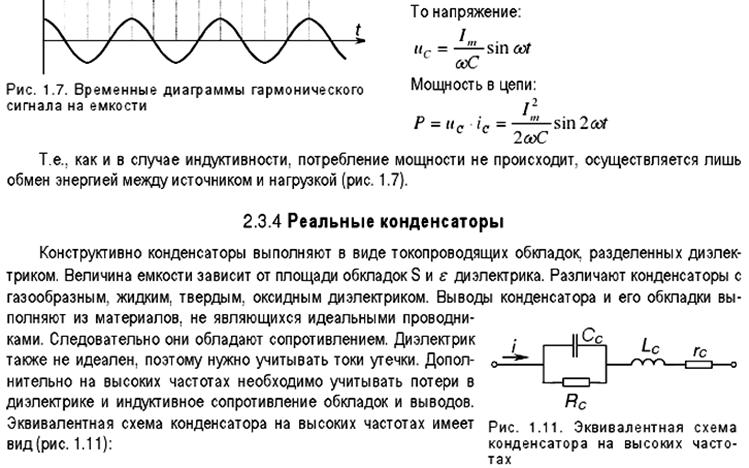
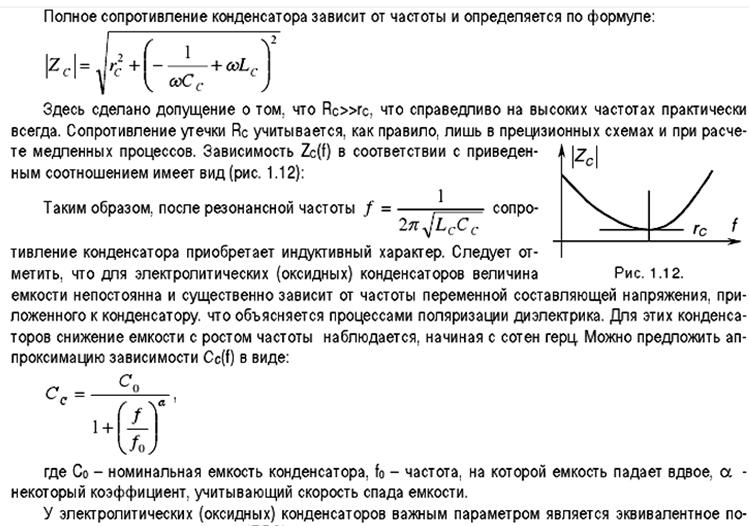
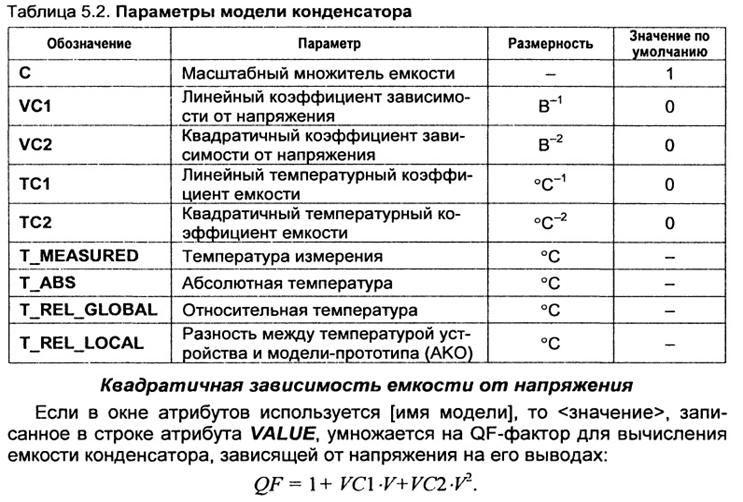
Модель конденсатора
16. Модель катушки индуктивности (дросселя) 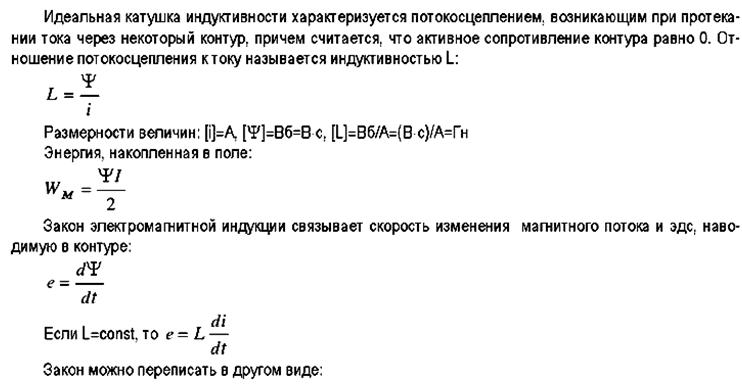


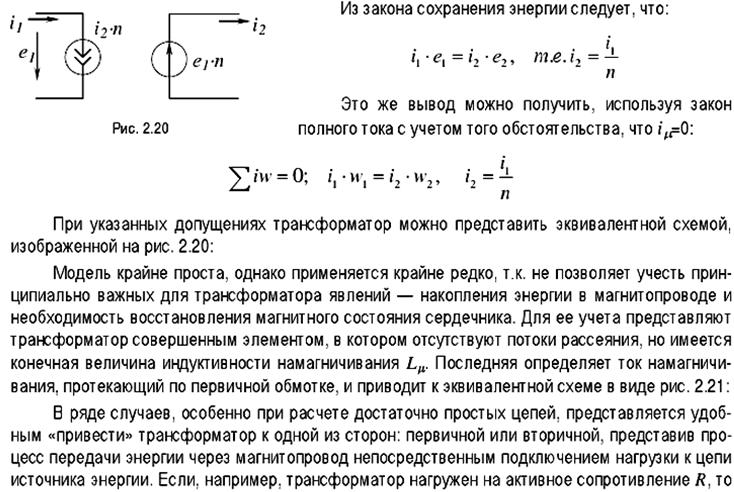
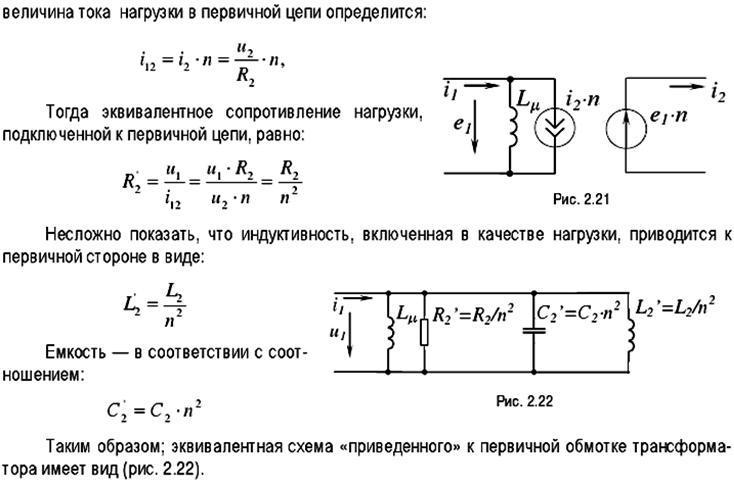
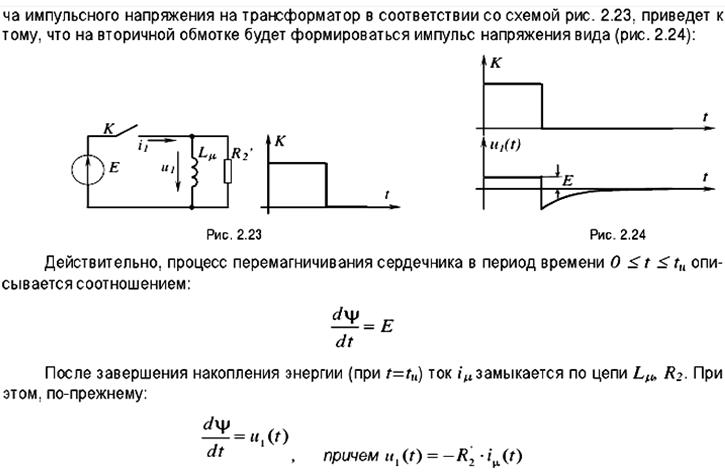
17. Модель трансформатора 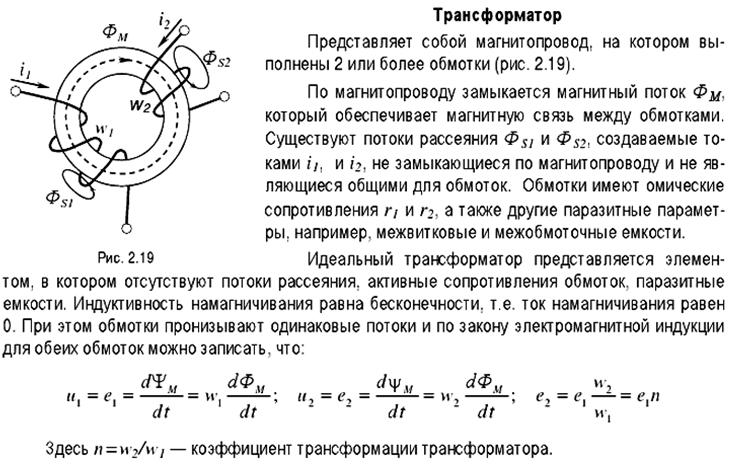

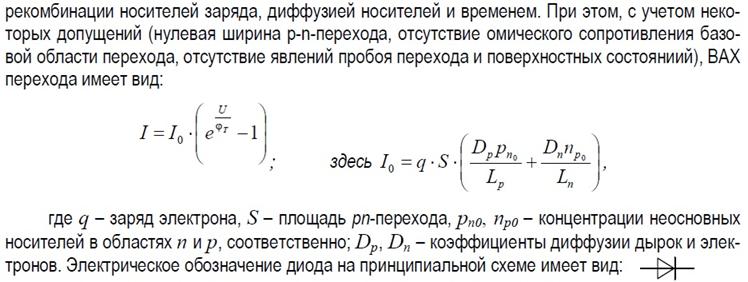
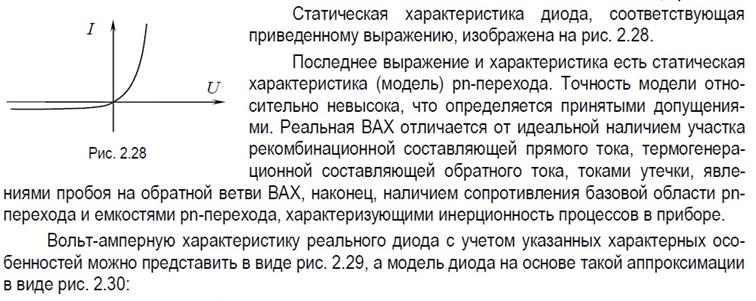
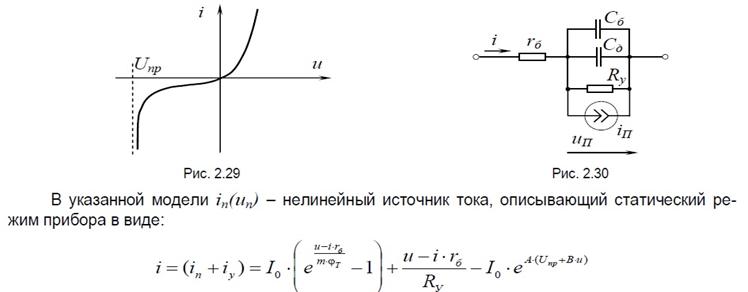
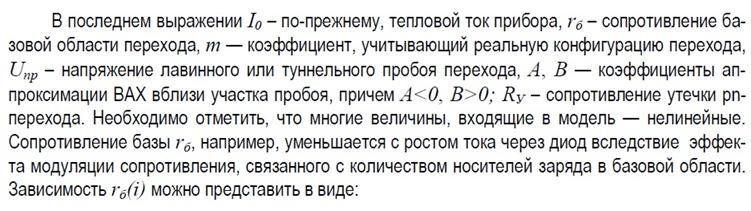
Модель полупроводникового диода.

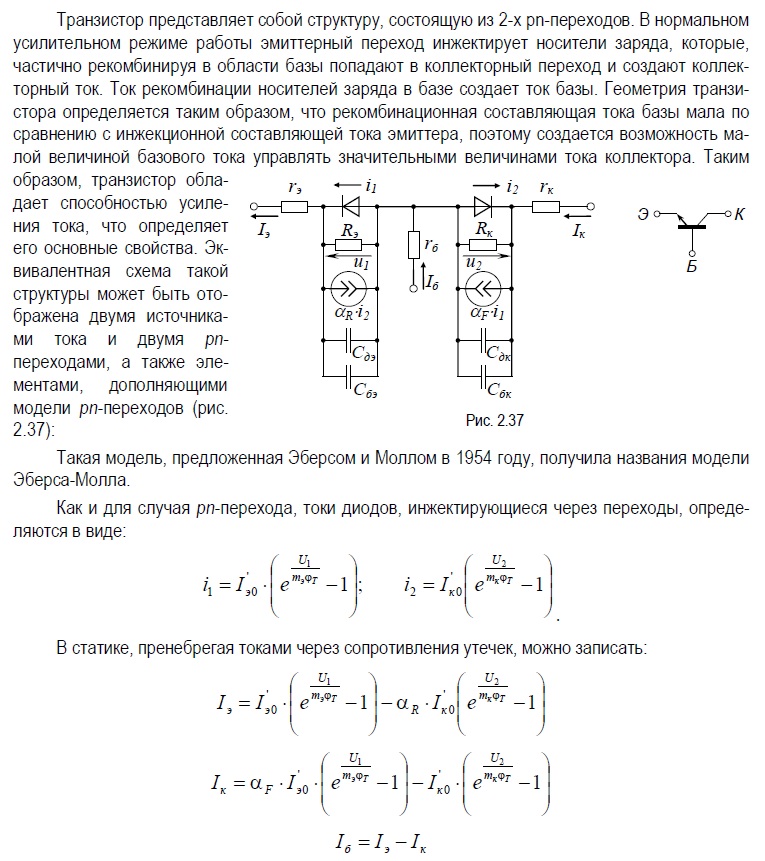
Модель биполярного транзистора Эмберса-Мола
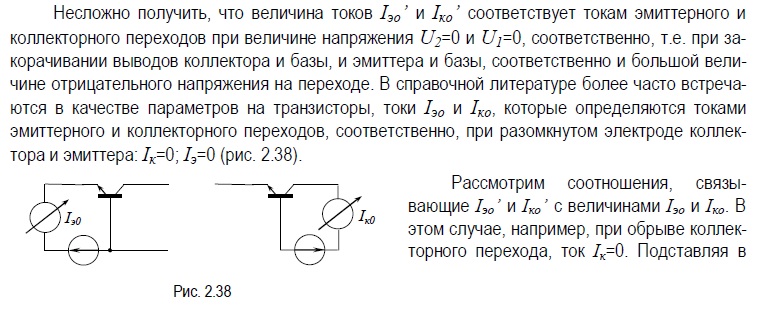
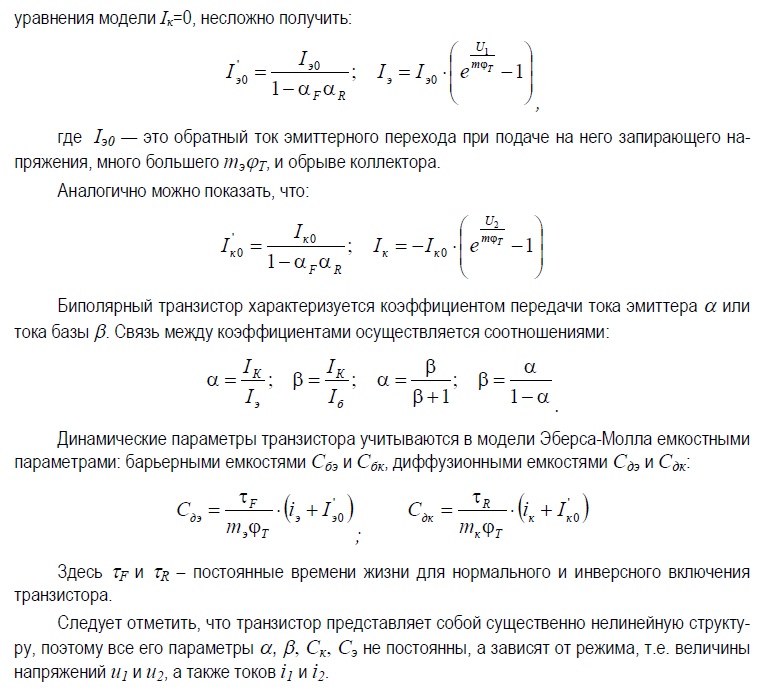
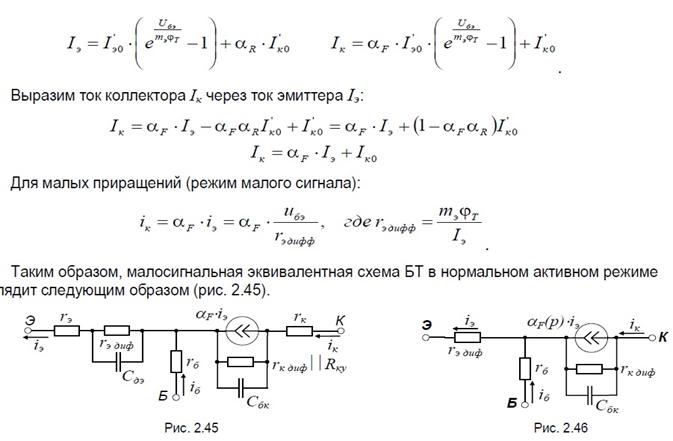
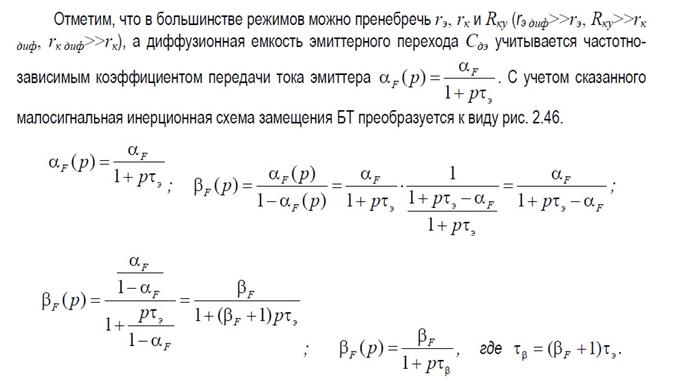
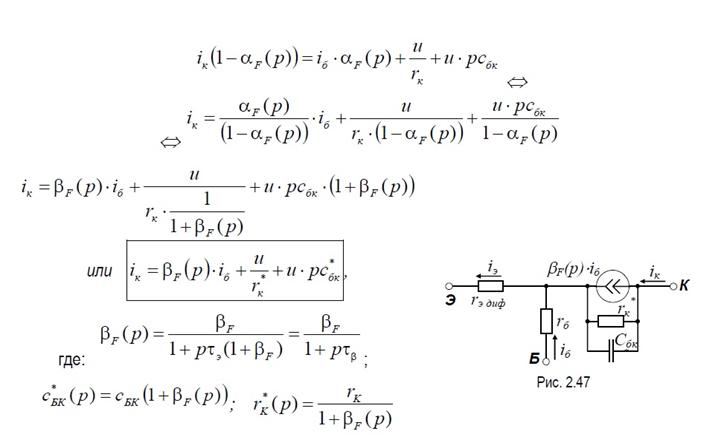
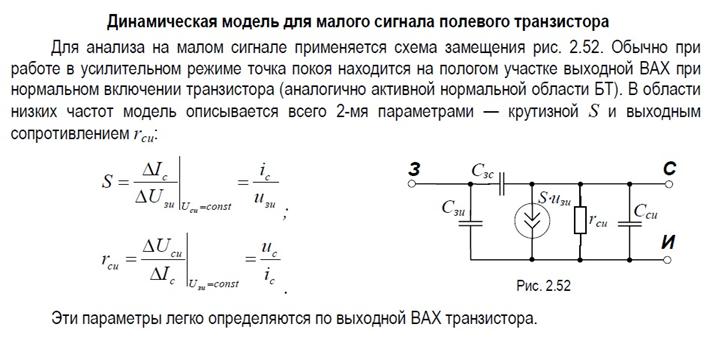
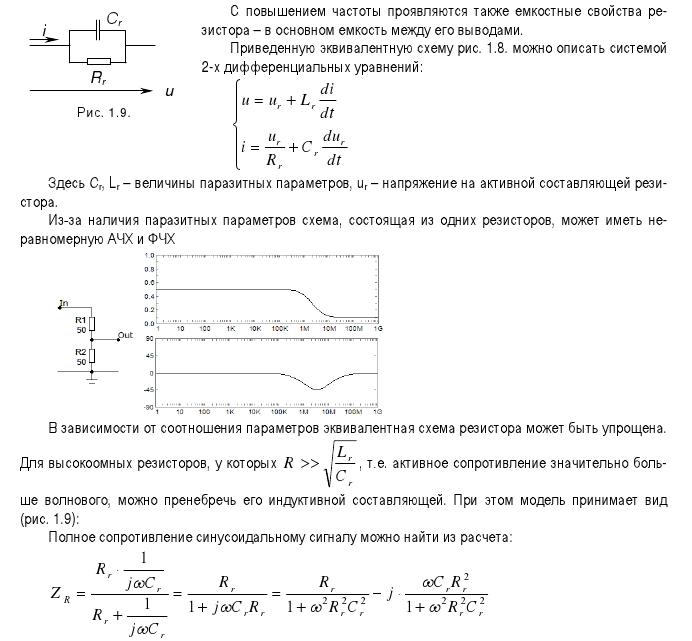
Малосигнальная динамическая модель биполярного транзистора
Для активного нормального режима малого сигнала широко используется простая моди-
фикация модели Эберса-Молла, которая может быть получена из основной модели при учете:
а) прямого смещения эмиттерного перехода Uбэ>0;
б) большого отрицательного смещения на коллекторном переходе Uбк<0;
в) малого изменения напряжений и токов относительного рабочей точки по постоянному
току.
Рассмотрим для этого случая уравнения Эберса-Молла:
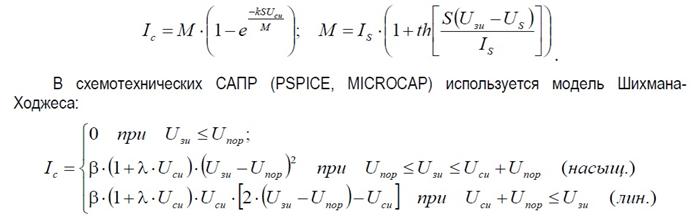
Модели полевого транзистора
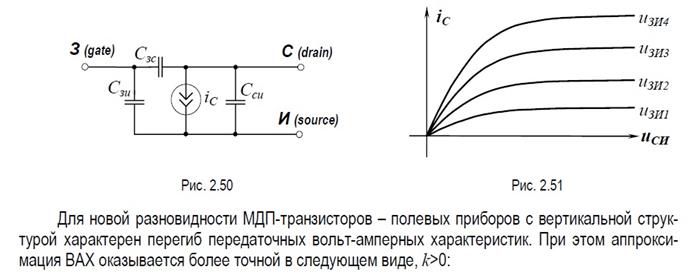
Полевые транзисторы - приборы, в которых используются эффекты изменения параметров полупроводника при воздействии на него электрическогополя. Полевые транзисторы по принципу действия подразделяют на приборы с управляющим pn-переходом, МДП-транзисторы, МДП-транзисторы с вертикальным каналом. Рассмотрим принцип работы МДП-транзистора (рис. 2.49):
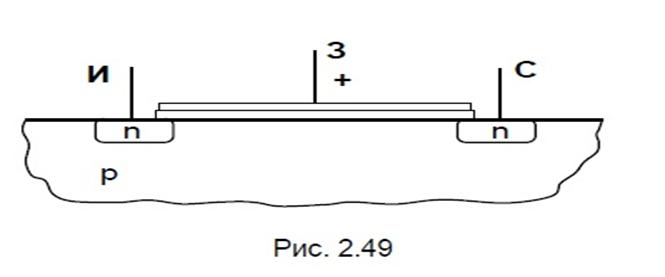
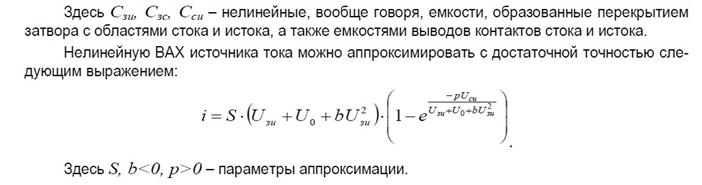
При подаче на затвор положительного потенциала достаточной величины происходит инверсия проводимости в приповерхностном слое полупроводника подложки, в результате чего образуется канал n-типа, проводимость которого зависит от величины приложенного напряжения. Таким образом, величина тока стока полевого транзистора оказывается зависящей от величины напряжения затвор-исток. Более детальное рассмотрение процессов в транзисторе приводит к тому, что ток стока зависит от напряжения сток-исток и вследствие эффекта перекрытия канала, вблизи области стока, таким образом, в целом полевой транзистор в статике представляется нелинейным источником тока вида: ic(U3U, Ucu). Полная модель полевого транзистора для не очень высоких частот может быть представлена в виде рис. 2.50.
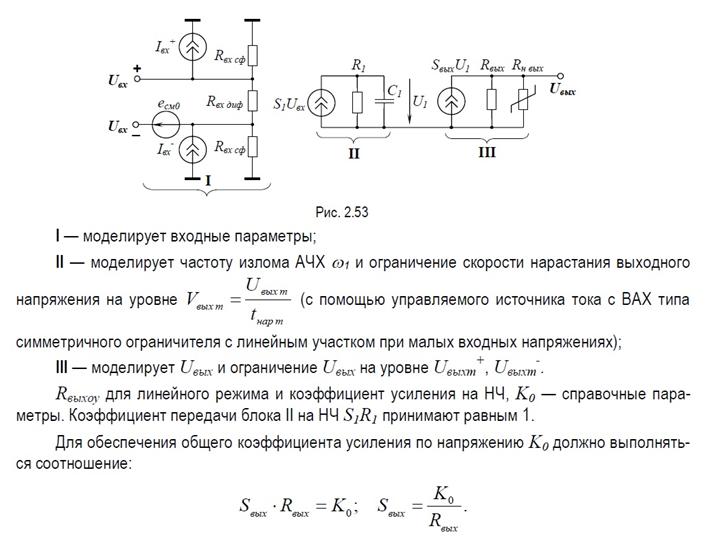
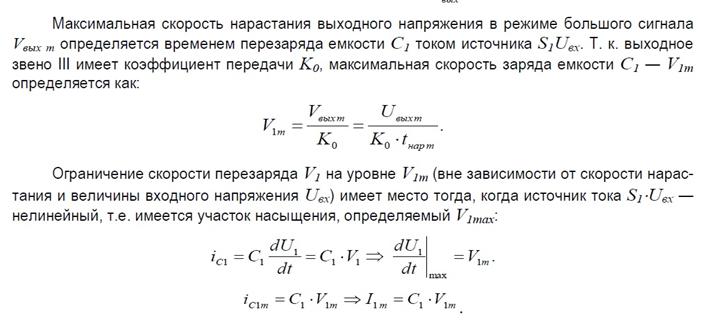
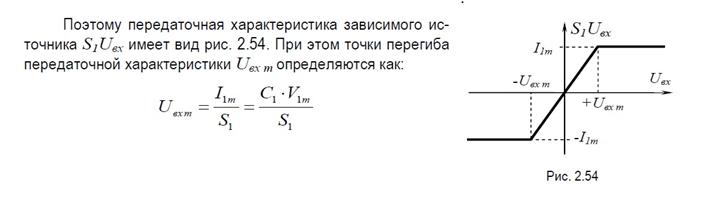
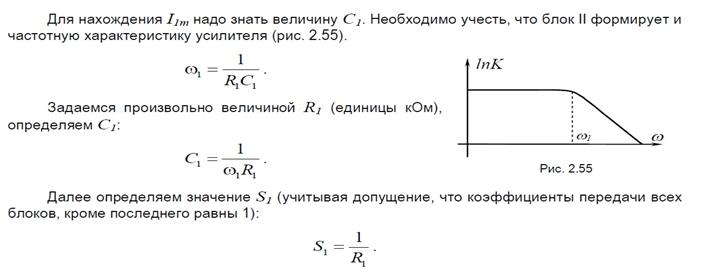
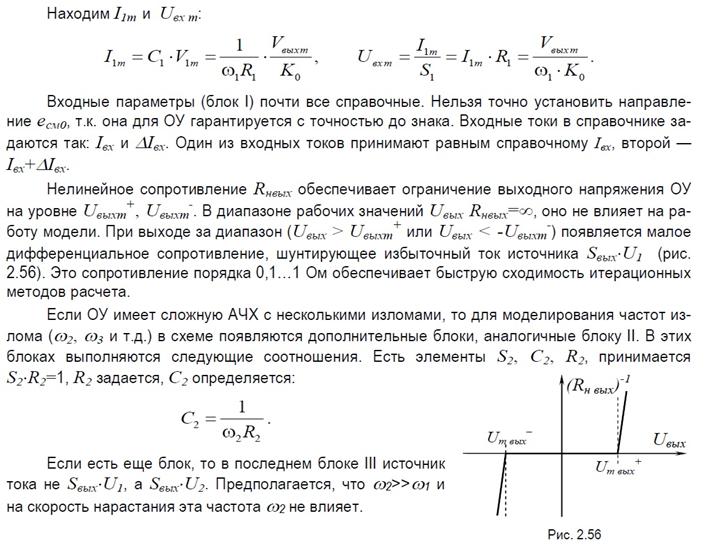
Модели операционного усилителя
Для моделирования элементов аналоговых устройств используется макромодель
операционного усилителя, которая в зависимости от количества учитываемых параметров, имеет различную степень сложности.

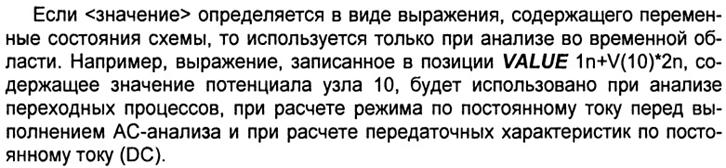
Модель конденсатора в программе MICRO-CAP
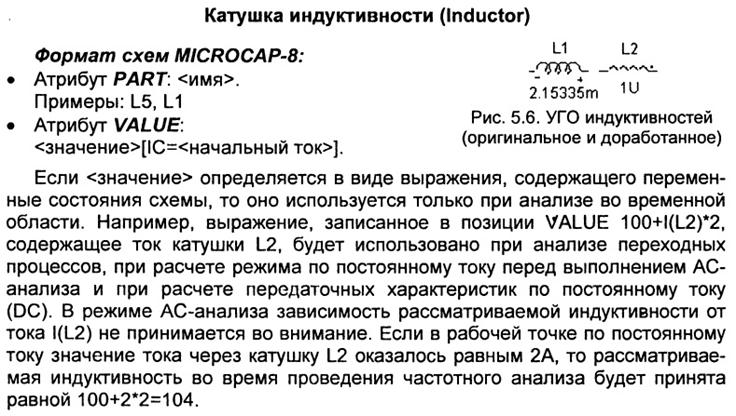
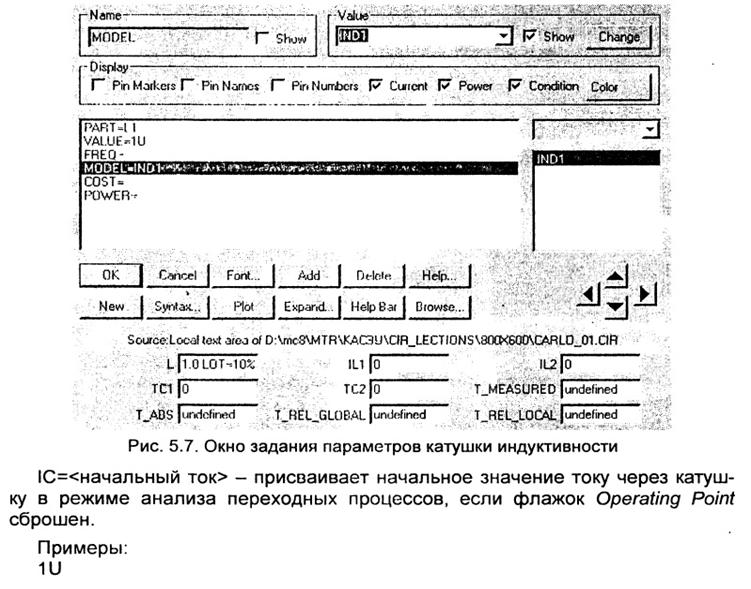
Модель катушки индуктивности в программе MICRO-CAP
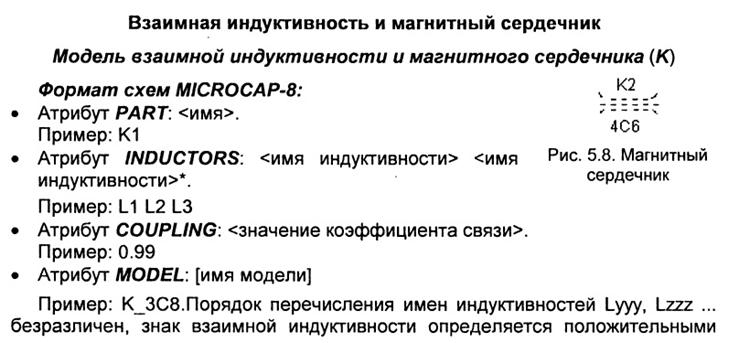
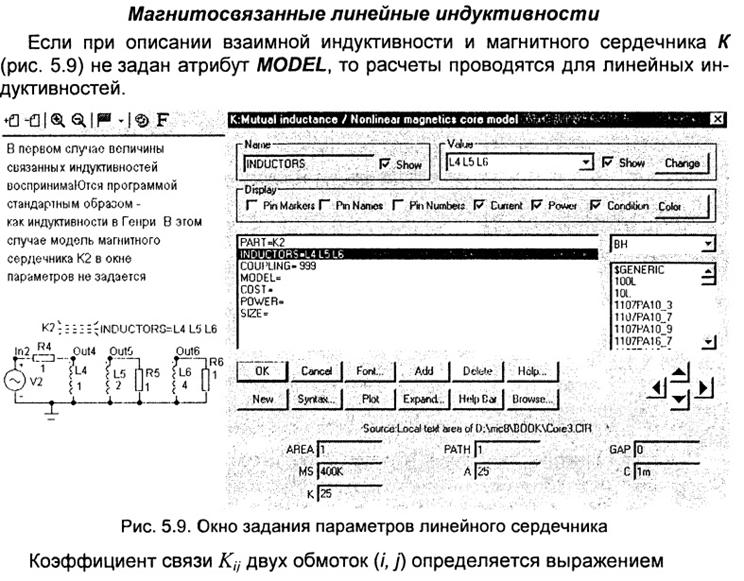
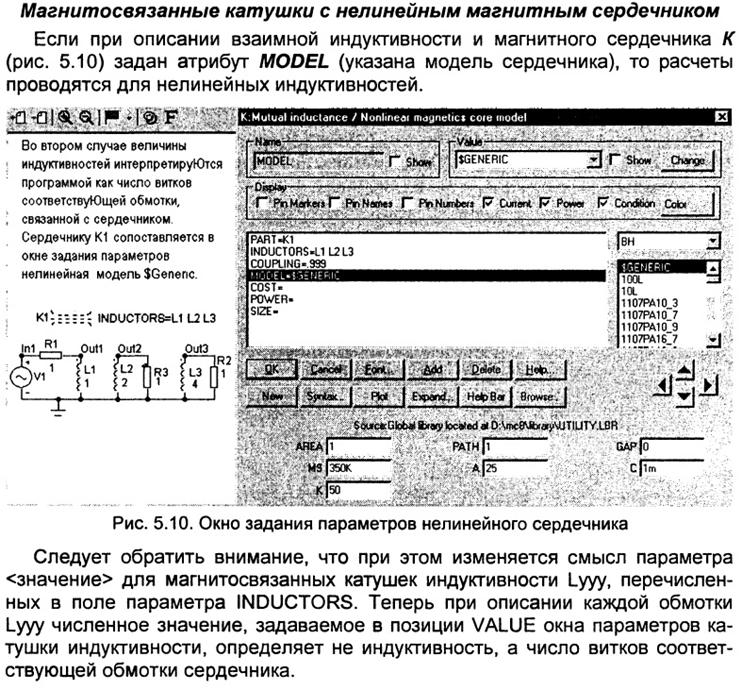
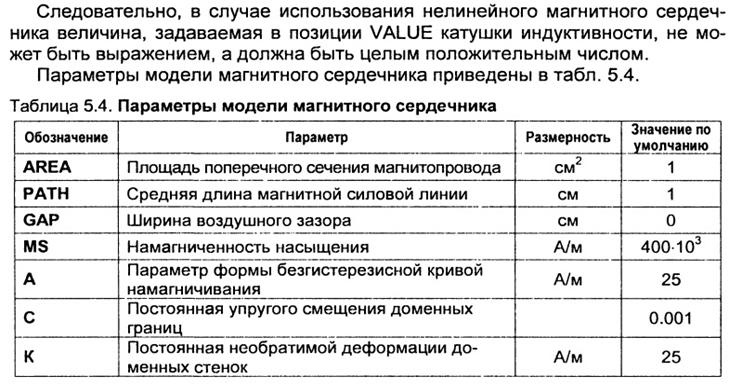
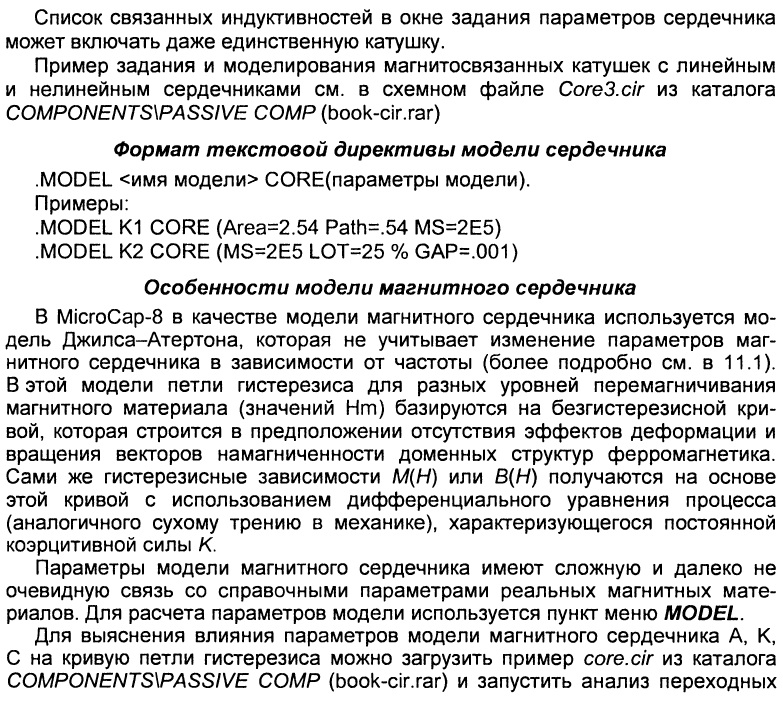
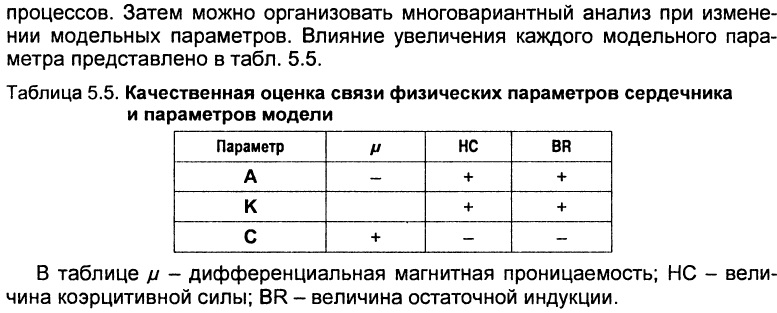
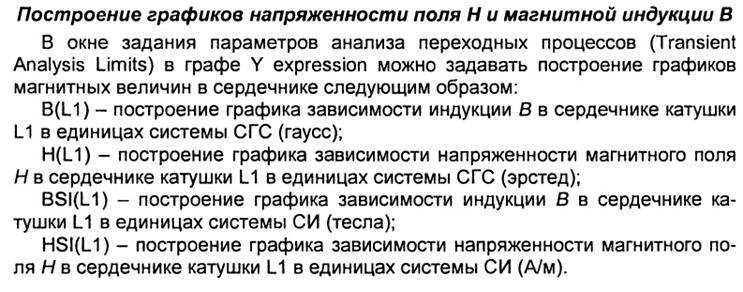
Модель Взаимной индуктивности и магнитного сердечника (к) в программе MICRO-CAP
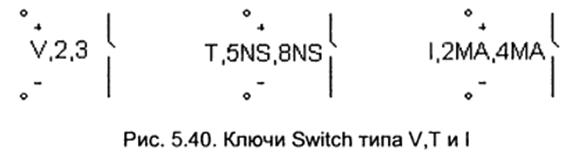
Модели ключей типа switch
Формат схем MICROCAP-8:
• Атрибут PART: <имя>.
• Атрибут VALUE: <[V | T | I] <n1, n2>[,Ron>[,<Roff>]].
Примеры:
V,1,2
l,2ma,3ma
Т,1 ms,2ms,50,5Meg
l,2ma,3ma,0.01,1MEG
Рис. 5.40. Ключи Switch типа V,T и I
При расчете переходных процессов используются ключи, управляемые разностью потенциалов, током (через индуктивность) и коммутируемые в определенные моменты времени. Это наиболее старый вид ключей, применяемых в ранних версиях программы MICROCAP. В последней версии используются также ключи типа S и W (см. ниже), имеющие более плавный переход между состояниями «включено» и «выключено». В ключах SWITCH приняты следующие обозначения:
V - управление разностью потенциалов.
I - управление током.
Т - переключение в определенные моменты времени.
п1, п2 - значения управляющей величины, при которых происходят переключения.
Ron, Roff - сопротивления ключа в замкнутом и разомкнутом состоянии.
По умолчанию Ron=1E-3 Ом, Roff=1E9 Ом.
Если п1<п2, то ключ замкнут (находится в состоянии ON) при управляющем сигнале п1<Х<п2 и разомкнут (находится в состоянии OFF), когда Х<п1 или Х>п2. Если же п1>п2, то ключ разомкнут (OFF) при управляющем сигнале п1>Х>п2 и замкнут (OFF), когда Х>п1 или Х<п2. Для ключей типа V управляющий сигнал X представляет собой разность потенциалов между управляющими выводами ключа. Для ключей типа I управляющий сигнал X представляет собой ток через индуктивность, включенную между управляющими выводами ключа. Для ключей типа Т управляющий сигнал X представляет время, при этом управляющие выводы ключа должны быть заземлены для минимизации общего количества узлов в схеме. При анализе переходных процессов следует обратить внимание на выбор шага расчета. Если шаг будет слишком большим, ключ может не переключаться. Для переключения ключа хотя бы одна расчетная точка должна попасть внутрь области значений, переводящих ключ в противоположное состояние.
При выполнении расчетов частотных характеристик или режима по постоянному току ключ заменяется постоянным сопротивлением.
Обратная связь по току
Структурная схема усилителя с последовательной обратной связью по току приведена на рис. 1.14. Усилительный каскад представлен в виде четырехполюсника с крутизной S = Iвых /Uвх.
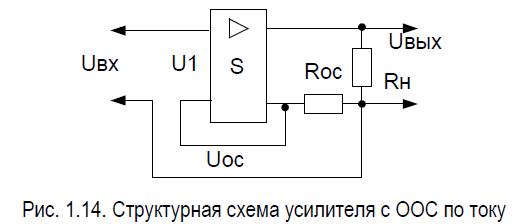
Запишем выражение для входной цепи
U1 = Uвх – Uос = Uвх – Iвых Rос
Разделим обе части равенства на Iвых и, сделав простые преобразования, получим, что

Для последовательной OOС по току справедливы почти все соотношения, что и для OOС по напряжению. Так, последовательная OOС по току увеличивает входное сопротивление:
Rвх ос=Rвх(1+SRос);
Также она расширяет частотную характеристику усилителя, уменьшает фазовые искажения, увеличивает стабильность крутизны:
В отличие от OOС по напряжение OOС по току увеличивает выходное сопротивление усилителя.
Rвых ос =Rвых(1+SRос).
Действительно, с увеличением выходного тока при постоянном значении входного сигнала происходит уменьшение напряжения U1. В результате ток в выходной цепи остается практически постоянным. Это эквивалентно тому, что в выходной цепи усилителя с OOС по току включен источник тока, ток которого мало изменяется с изменением нагрузки.
Классификация моделей компонентов электронных схем.
Математические модели технических устройств могут быть классифицированы по ряду признаков:
1. По характеру отображаемых процессов выделяют: статические и динамические модели.
2. По способу представления модели различают: аналитические, графические и
табличные
Аналитические модели определяют прибор или компоненту в виде уравнений, описывающих его ВАХ или в форме дифференциальных уравнений описывающих переходные процессы в моделируемой схеме и характеризующие инерционность элемента.
Графические модели позволяют представить компоненты в виде графиков ВАХ или в виде эквивалентных схем замещения.
Табличные модели позволяют представить схему или элемент в виде цифровых таблиц, полученных в ходе экспериментального исследования объекта моделирования и соответствующих графикам экспериментальных ВАХ. Табличные модели используют обычно в том случае; если аналитическую модель построить трудно вследствие сложной зависимости. Иногда при сложных функциональных аналитических зависимостях для ВАХ их сознательно табулируют, если это позволяет объем памяти ЭВМ, и создают таким образом, возможно менее точную, но более удобную модель.
Перечисленные выше модели могут быть выполнены в виде подпрограмм, при таком представлении они превращаются в цифровую модель.
Аналитические и графические модели могут быть также заданы в виде алгоритма вычисления внешних параметров модели, при этом модель носит название алгоритмической модели. После оформления подпрограммы в соответствии с приведенным алгоритмом модель становится цифровой.
Цифровые модели могут быть достаточно точными, т.к. степень их сложности в основном определяется сложностью программы и допустимыми для расчета затратами машинного времени. В настоящее время цифровые модели используются все более широко в связи с развитием САПР РЭА.
3. По характеру зависимостей модели делятся на: линейные и нелинейные
Имеется особый класс кусочно-линейных моделей, нелинейность которых проявляется в ограниченном количестве точек стыка линейных участков.
Нелинейные модели, естественно, оказываются более точными, но и более сложными.
4. По диапазону рабочих сигналов модели классифицируются на: модели большого сигнала и малосигнальные
Малосигнальные модели, как правило, представляют собой линейные модели; модели для большого сигнала учитывают нелинейность характеристик активных и пассивных элементов схемы (биполярных и полевых усилительных приборов).
5. По диапазону рабочих частот выделяют: низкочастотные, высокочастотные и
сверхвысокочастотные
Низкочастотные модели не учитывают инерционность компонентов модели и, поэтому низкочастотные модели используют для расчета схем по постоянному току (в статическом режиме).
Высокочастотные модели — модели более высокого уровня, они учитывают помимо особенностей статического режима инерционность компонентов. Поэтому такие модели дополняют системой дифференциальных уравнений, учитывающей инерционность компонентов, или эквивалентными схемами реальных приборов на высоких частотах — индуктивностями и емкостями выводов, инерционностями, определяющими физические процессы в компонентах (например, накопление заряда), емкостями областей структур и т.п.
Особенность низкочастотных и высокочастотных моделей состоит в том, что они выполняются на сосредоточенных элементах и поэтому для этих моделей справедливы законы Кирхгофа.СВЧ модели отличаются от высокочастотных моделей учетом пространственных и временных координат, поэтому для анализа и расчета СВЧ-схем необходимо использовать уравнения Максвелла. Применение законов Кирхгофа оправдано лишь в диапазоне частот до 10 гГц, где размеры компонентов (особенно компонентов ИС) остаются меньше длины волны 1=3 см.
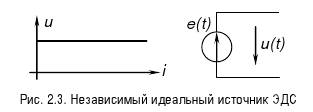
13.)Базовый набор элементов моделей.Зависимые и независимые источники тока и напряжения. Их основные параметры.
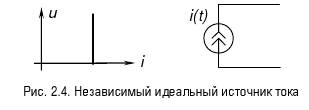
Существует ряд моделей, на основе которых может быть построена любая электрическая модель прибора. Эти модели получили название базового набора элементов моделей. Идеальные активные элементы – идеальные источники напряжения или тока - вводятся для характеристики реальных источников электрической энергии, в которых неэлектрические виды. Рис. 2.3. Независимый идеальный источник эдс энергии (химическая, механическая) преобразуются в электрическую. В зависимости от вида ВАХ и возможности управления выходными параметрами различают зависимые и независимые источники напряжения и тока. Независимый идеальный источник напряжения представляет собой двухполюсный элемент, напряжение на котором, возможно, изменяется во времени по некоторому закону e(t), не зависящему от величины тока, проходящего через источник. Выходная характеристика источника u(l), его эквивалентная схема замещения (рис. 2.3).В режиме короткого замыкания величина тока источника стремится к бесконечности, источник отдает бесконечно большую мощность в нагрузку. Независимый идеальный источник тока представляет собой двухполюсный элемент, выходной ток которого изменяется, возможно, по некоторому закону во времени независимо от напряжения на элементе. Источник отдает в нагрузку бесконечно большую мощность при холостом ходе. Эквивалентная схема и ВАХ источника изображены на рис. 2.4.
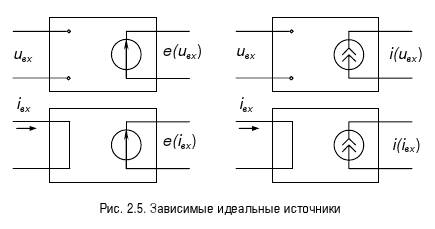
Зависимые идеальные источники напряжения или тока представляют собой трехполюсные или четырехполюсные элементы (необратимые), которые ставят в зависимость от входного сигнала (напряжения или тока) выходной ток или напряжение. Если управление зависимыми источниками осуществляется током, то его вход представляет собой короткое замыкание, если напряжением — холостой ход. Изображение зависимых источников напряжения или тока приведено на рис. 2.5:
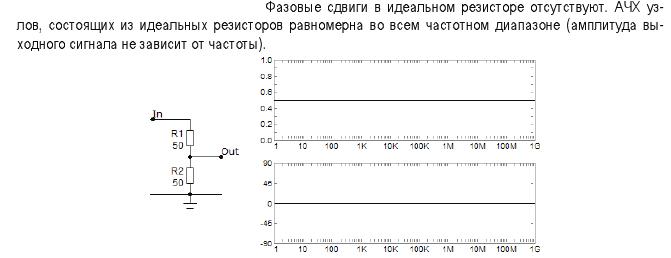
14.)Модели резистора. Идеальный линейный резистор характеризуется только одним параметром -сопротивлением R или проводимостью G. Проводимость - величина, обратная сопротивлению: G=1/R. Размерности величин: R[Om], G[Cm], Сопротивление (проводимость) устанавливает связь между током через резистор и напряжением на нем: U=IR.
 В общем случае сопротивление резистора может быть постоянным, либо меняться в зависимости от каких-либо воздействий (механических, температурных, электрических и т.д.). Если сопротивление не зависит от тока через резистор или напряжения на нем, то говорят, что оно нелинейно (зависимость тока от напряжения - прямая линия). В противном случае оно нелинейно. Нелинейное сопротивление характеризуется ВАХ (рис. 1.1). Компонент с такой характеристикой называется нелинейным резистором.
В общем случае сопротивление резистора может быть постоянным, либо меняться в зависимости от каких-либо воздействий (механических, температурных, электрических и т.д.). Если сопротивление не зависит от тока через резистор или напряжения на нем, то говорят, что оно нелинейно (зависимость тока от напряжения - прямая линия). В противном случае оно нелинейно. Нелинейное сопротивление характеризуется ВАХ (рис. 1.1). Компонент с такой характеристикой называется нелинейным резистором.
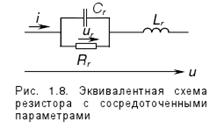 У реального резистора вольтамперная характеристика на постоянном токе не отличается от идеальной. Однако любой реальный резистор помимо сопротивления обладает емкостью и индуктивностью. Эти дополнительные параметры резистора называются паразитными параметрам Такими параметрами обладает не только резистор, но и любой другой реальный компонент (конденсатор, катушка индуктивности, трансформатор, транзистор и т.д.). Величина паразитных параметров определяется в основном конструктивными особенностями компонента и при определенных условиях паразитные параметры компонентов могут оказывать существенное влияние на работу электронных схем. Поэтому при создании моделей компонентов (особенно предназначенных для работы на высоких частотах) необходимо предусмотреть возможность учета паразитных параметров. Это существенно усложняет модели. Например, даже упрощенная высокочастотная модель резистора состоит из трех компонентов (рис. 1.8). Однако и она не в полной мере отражает поведение резистора во всей области частот. Эта модель использует сосредоточенные параметры (C и L), а на самом деле, они распределенные. Если же заменить сосредоточенные параметры распределенными, то модель еще более усложняется.На практике не всегда используют модели с полным набором параметров, поскольку учет всех паразитных компонентов может существенно увеличить время расчета, а точность не повысится. Например, на частотах в единицы килогерц учет емкости и индуктивности пленочных резисторов нецелесообразен, поскольку на таких частотах реактивные свойства практически не проявляются. А вот учет индуктивности проволочного резистора уже обязателен, поскольку его паразитная индуктивность намного больше. В области СВЧ, при моделировании элементов в гибридном интегральном или твердотельном исполнении, необходимо использование самой сложной модели - с распределенными пара и метрами, поскольку в этих областях применения обязателен учет эффектов длинных линий.
У реального резистора вольтамперная характеристика на постоянном токе не отличается от идеальной. Однако любой реальный резистор помимо сопротивления обладает емкостью и индуктивностью. Эти дополнительные параметры резистора называются паразитными параметрам Такими параметрами обладает не только резистор, но и любой другой реальный компонент (конденсатор, катушка индуктивности, трансформатор, транзистор и т.д.). Величина паразитных параметров определяется в основном конструктивными особенностями компонента и при определенных условиях паразитные параметры компонентов могут оказывать существенное влияние на работу электронных схем. Поэтому при создании моделей компонентов (особенно предназначенных для работы на высоких частотах) необходимо предусмотреть возможность учета паразитных параметров. Это существенно усложняет модели. Например, даже упрощенная высокочастотная модель резистора состоит из трех компонентов (рис. 1.8). Однако и она не в полной мере отражает поведение резистора во всей области частот. Эта модель использует сосредоточенные параметры (C и L), а на самом деле, они распределенные. Если же заменить сосредоточенные параметры распределенными, то модель еще более усложняется.На практике не всегда используют модели с полным набором параметров, поскольку учет всех паразитных компонентов может существенно увеличить время расчета, а точность не повысится. Например, на частотах в единицы килогерц учет емкости и индуктивности пленочных резисторов нецелесообразен, поскольку на таких частотах реактивные свойства практически не проявляются. А вот учет индуктивности проволочного резистора уже обязателен, поскольку его паразитная индуктивность намного больше. В области СВЧ, при моделировании элементов в гибридном интегральном или твердотельном исполнении, необходимо использование самой сложной модели - с распределенными пара и метрами, поскольку в этих областях применения обязателен учет эффектов длинных линий.
На более низких частотах учитывают либо только индуктивность, либо емкость и индуктивность как сосредоточенные параметры. Индуктивность резистора формируется за счет индуктивности выводов и индуктивности резистивного слоя. В зависимости от технологии изготовления величина этого паразитного параметра может меняться в сотни раз и даже более. За счет наличия паразитной индуктивности (рис. 1.9) сопротивление резисторов на высокой частоте становится комплексным, приобретает индуктивный характер:
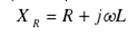
Здесь первое слагаемое- активная составляющая полного сопротивления, второе- реактивное 
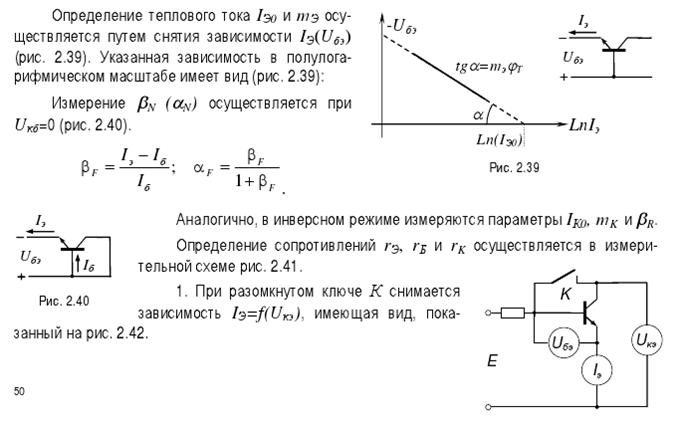
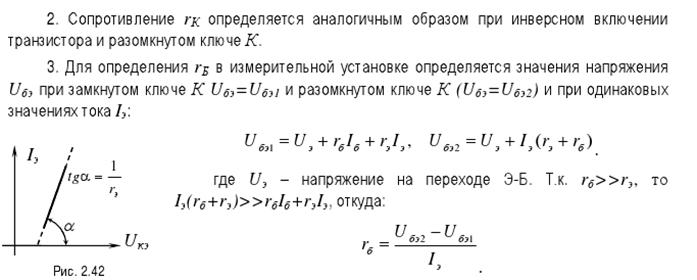
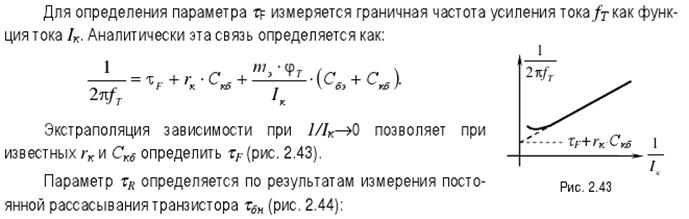
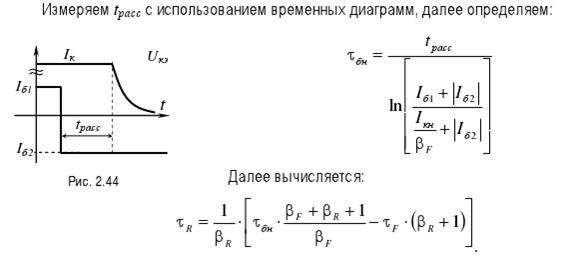
20)определение параметров модели биполярного транзистора.
Модель конденсатора
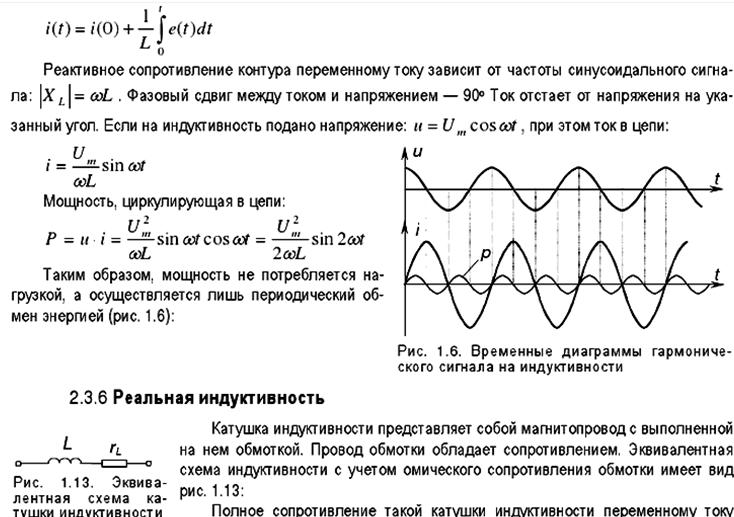
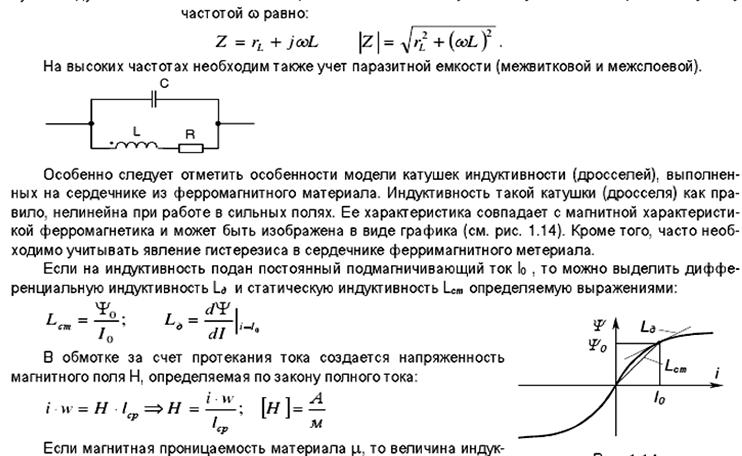
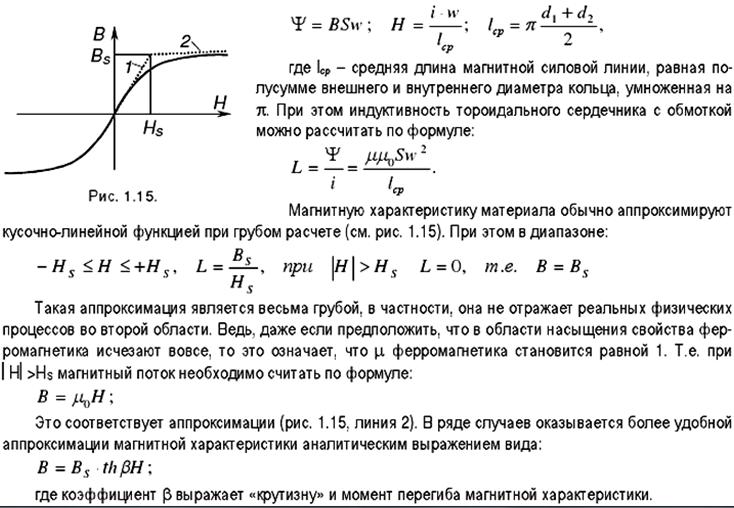
16. Модель катушки индуктивности (дросселя)
17. Модель трансформатора






