

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Дисциплины:
|
из
5.00
|
Заказать работу |
Определим передаточную функцию линейной системы, отвечающую минимуму дисперсии ошибки на выходе системы
 . (5.11)
. (5.11)
Выразим процесс  в виде (4.4):
в виде (4.4):
 . (5.12)
. (5.12)
Представим  в виде суммы
в виде суммы  , где
, где  - переходная функция оптимальной системы. Очевидно, что
- переходная функция оптимальной системы. Очевидно, что  при e=0, так как при этом
при e=0, так как при этом  .
.
Производная  определится как:
определится как:
 , (5.13)
, (5.13)
где  . (5.14)
. (5.14)
Подставляя (5.14) в (5.13), и приравнивая полученное выражение нулю, будем иметь:

 . (5.15)
. (5.15)
Интеграл (5.15) будет тождественно равен нулю при выполнении условия:
 . (5.16)
. (5.16)
Переписывая (5.16), получим условие, отвечающее минимуму дисперсии ошибки на выходе линейной системы:
 или
или  . (5.17)
. (5.17)
Для решения поставленной задачи перейдем в (5.17) к операторныим спектральным плотностям:
 . (5.18)
. (5.18)
Следует отметить, что уравнение (5.18) справедливо при t>0, так как интеграл в (5.15) брался в пределах  . Распространяя уравнение (5.18) на диапазон t<0 и выражая SVY (p) через SVV (p), получим:
. Распространяя уравнение (5.18) на диапазон t<0 и выражая SVY (p) через SVV (p), получим:
 . (5.19)
. (5.19)
Оригинал, отвечающий правым частям операторных уравнений (5.19), определится как
 при t>0 и
при t>0 и  при t<0.
при t<0.
В уравнениях (5.19) две неизвестных -  и
и  . Решение этих уравнений можно получить, разбив их левые части на слагаемые, содержащие, соответственно, только левые и правые полюса. Тогда, приравнивая выражение для левых корней нулю, получим искомое решение
. Решение этих уравнений можно получить, разбив их левые части на слагаемые, содержащие, соответственно, только левые и правые полюса. Тогда, приравнивая выражение для левых корней нулю, получим искомое решение
 .
.
При этом
Следовательно изображение искомой функции также может быть представлено в виде суммы:
 . (5.20)
. (5.20)
Для выделения составляющих левых частей уравнений (5.19), отвечающих, соответственно, левым и правым корням, произведем факторизацию спектральной плотности суммарного процесса на входе системы:
 . (5.21)
. (5.21)
Подставии (5.21) во второе уравнение системы (5.19), получим:
 . (5.22)
. (5.22)
Разобьем первый член уравнения (5.22) на два сумму двух членов, содержащих, соответственно левые и правые корни:
 . (5.23)
. (5.23)
Приравнивая в (5.23) члены, содержащие лишь левые полюса, получим выражение для оптимальной передаточной функции линейной системы:
 . (5.24)
. (5.24)
Подставив в (5.24)  , получим окончательное выражение для оптимальной передаточной функции:
, получим окончательное выражение для оптимальной передаточной функции:
 , (5.25)
, (5.25)
где  .
.
При решении задачи фильтрации помехи (G (p)=1) выражение (5.25) упрощается:
 . (5.26)
. (5.26)
При практическом использовании выражений (5.25) и (5.26) необходимо выделить в выражении  слагаемое, содержащее левые корни -
слагаемое, содержащее левые корни -  . Приведем метод такого выделения. Функция Ф(p) является аналитической в полосе b<Re p <a, ограниченной ближайшими к оси мнимых левым и правым полюсами этой функции (рис.5.2).
. Приведем метод такого выделения. Функция Ф(p) является аналитической в полосе b<Re p <a, ограниченной ближайшими к оси мнимых левым и правым полюсами этой функции (рис.5.2).
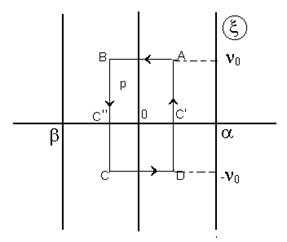
Поэтому, если внутри этой полосы построить прямоугольник АВСD, внутри которого выбрать произвольную точку p,то воспользовавшись интегральной формулой Коши [3], можно записать:
 или
или
Рис.5.2
 . (5.27)
. (5.27)
Устремим n0 к  и положим, что
и положим, что  . Тогда
. Тогда
 . (5.28)
. (5.28)
Первое из слагаемых в (5.28) является аналитической функцией в полуплоскости Re p > c'', второе – аналитической в полуплоскости Re p < c'. Следовательно, функция Ф (р) является аналитической в полосе b < Re p <a (границы с ' и c '' могут быть сколь угодно приближены к границам a и b). Последнее обстоятельство позволяет определять Ф+(р) с помощью теории вычетов:
 , (5.29)
, (5.29)
где  - левые полюса
- левые полюса  .
.
Пример. Определим оптимальную передаточную функцию для примера, рассмотренного в предыдущем параграфе:
 ,
,  ,
,  ,
,  ,
,  .
.
,  ,
,  .
.
Производя факторизацию  , получим
, получим  ,
,
где  ,
,  ,
,  .
.

 .
.
Следовательно передаточная функция оптимального фильтра будет:
 . (5.30)
. (5.30)
Возможная реализация оптимального фильтра приведена на рис.5.3.
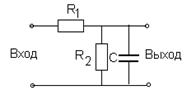 Передаточная функция системы рис.5.3 имеет вид
Передаточная функция системы рис.5.3 имеет вид
 ,
,  или
или
 . (5.31)
. (5.31)
Рис.5.3
Параметры схемы могут быть определены на основе приравнивания правых частей выражений (5.30) и (5.31):
 ®
®  ;
;  (5.32)
(5.32)
Уравнения (5.32) связывают три неизвестные величины: R 1, R 2 и С. Поэтому один из этих параметров контура на рис.5.3 может быть задан произвольно (например, емкость С). Таким образом, оптимальным фильтром при заданных вероятностных характеристиках полезного сигнала и помехи является простейший интегрирующий контур, осуществляющий одновременно операцию умножения на постоянный множитель.

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!