Достоинством данного метода [5] является компенсация методических погрешностей измерений за счет того, что полное время счета неизвестной частоты разделено на две части, одна из которых имеет временной сдвиг вверх, а другая – вниз по отношению к истинному значению частоты. На рис. 1.5.6 представлены диаграммы, поясняющие работу. Автономный ГКЧ управляется треугольным напряжением ЦАП, поэтому частота испытательного сигнала также изменяется по треугольному закону.
Выходной сигнал ИУ преобразуется в напряжение огибающей UАЧХ. Будем считать, что в установившемся режиме работы моменты времени t1 и t4 соответствуют равенству мгновенного значения частоты ГКЧ нижней граничной частоте полосы пропускания, а моменты t2 и t3 – верхней граничной частоте.
В режиме измерения средней частоты полосы пропускания на вход разрешения суммирования компьютерного измерителя частоты (КИЧ) подается сигнал разрешения счета длительностью t1, центр которого сдвинут вверх относительно  (момент t1), а также сигнал счета длительностью t3, центр которого сдвинут вниз относительно
(момент t1), а также сигнал счета длительностью t3, центр которого сдвинут вниз относительно  (момент t3). Поскольку длительность каждого интервала счета равна половине необходимого времени измерения частоты, то по окончании периода треугольного напряжения КИЧ вычислит величину:
(момент t3). Поскольку длительность каждого интервала счета равна половине необходимого времени измерения частоты, то по окончании периода треугольного напряжения КИЧ вычислит величину:

где  - длительность интервала разрешения счета, равная половине времени измерения частоты (Т изм=2
- длительность интервала разрешения счета, равная половине времени измерения частоты (Т изм=2  ); tАЧХ = t2 – t1 = t4 - t3 - время изменения частоты ГКЧ в пределах полосы пропускания.
); tАЧХ = t2 – t1 = t4 - t3 - время изменения частоты ГКЧ в пределах полосы пропускания.

Рис. 1.5.6. Диаграммы, поясняющие метод счета «вверх-вниз»
В режиме измерения верхней граничной частоты полосы пропускания на вход разрешения суммирования КИЧ подаются сигналы разрешения счета длительностью t2 и t3, центры которых смещены относительно соответственно вверх и вниз. Поскольку длительность каждого интервала счета равна половине необходимого времени измерения частоты, то по окончании периода треугольного напряжения КИЧ вычислит величину:

В режиме измерения нижней граничной частоты полосы пропускания на вход разрешения суммирования КИЧ подаются сигналы разрешения счета длительностью t1 и t4, центры которых смещены относительно соответственно вверх и вниз. Поскольку длительность каждого интервала счета равна половине необходимого времени измерения частоты, то по окончании периода треугольного напряжения КИЧ вычислит величину:

В режиме измерения ширины полосы пропускания на вход разрешения суммирования КИЧ подаются сигналы разрешения счета длительностью t2 и t3, а на вход разрешения вычитания подаются сигналы длительностью t1 и t4. При этом в процессе работы определяются  и
и  , а затем находится их разность. По окончании периода треугольного напряжения КИЧ вычислит величину:
, а затем находится их разность. По окончании периода треугольного напряжения КИЧ вычислит величину:

Методические погрешности измерений исключены, так как один из каждой пары импульсов времени счета имеет временной сдвиг вверх, а другой – вниз по отношению к истинному значению частоты, что обеспечивает компенсацию погрешности.
Глава 2. Применение преобразований Фурье и Гильберта в задачах оценки
Параметров радиосигналов
2.1. Реализация преобразования Фурье при переменном шаге дискретизации сигнала
В задачах с постоянным шагом дискретизации применение формул дискретного преобразования Фурье (ДПФ) не вызывает затруднений. В режиме реального времени при обработке массива данных с любым числом отсчетов для реализации алгоритма быстрого преобразования Фурье (БПФ) можно применить хорошо себя зарекомендовавший метод Кули-Тьюки. Однако в некоторых случаях, например при использовании метода несинхронизированного стробирования, возникает необходимость реализации преобразования Фурье по массиву отсчетов с непостоянным периодом дискретизации. При этом применение известных формул дискретного преобразования Фурье приведет к большим погрешностям.
Прямое преобразование Фурье для сигнала s(t) может быть записано в виде:
 .
.
Если при расчете преобразования Фурье воспользоваться модернизированной (рассмотренной выше) формулой прямоугольников при переменном шаге дискретизации и обозначить fi=s(ti)exp(-jwti), получим:
 . (2.1.1)
. (2.1.1)
Если при расчете преобразования Фурье воспользоваться модернизированной формулой Симпсона для переменного шага дискретизации со смещением криволинейных трапеций на один дискрет по оси времени с целью уменьшения влияния погрешности аппроксимации параболой, получим следующее выражение:
 , (2.1.2)
, (2.1.2)
где i= 1, 2, 3….; коэффициенты ki, bi, ci kj, bj, cj, kl, bl и cl находятся по формулам (1.2.7) и (1.2.9).
Для того, чтобы подсчитать сумму ровно на одном периоде сигнала, последнее значение функции принимается равным первомузначению (fN+ 1 =f 1, fN+ 2 =f 2), а время этого значения принимается равным периоду сигнала плюс время первого значения (tN+ 1 = t 1 +TC, tN+2= t 2 +TC).
Результаты моделирования нахождения спектральных составляющих путем расчета с применением преобразования Фурье представлены в табл. 2.1.1. В качестве входного был взят меандр и гармонический сигнал. В примере выбрано число точек N =88, каждая из которых расположена на оси времени с шагом 1/ N. Далее каждая из N точек сдвигалась по равномерному закону распределения на случайную величину, лежащую в пределах половины дискрета (-0.5, 0.5). По результатам 10000 случайных точек, распределенных по времени по равномерному закону, были определены СКО и математическое ожидание, которые внесены в таблицы.
Для меандра в первом столбце таблицы представлена относительная частота для времени преобразования, равного периоду меандра. При этом строка «0» соответствует постоянной составляющей сигнала, строка «1» соответствует первой гармонике входного сигнала, строка «2» - второй гармонике, и т.д. В столбце ДПФ представлено значение соответствующей компоненты меандра, рассчитанной с высокой точностью с применением дискретного преобразования Фурье (ДПФ) для дискретизации с постоянным периодом. Это значение составляющей следует считать истинным и по отношению к нему находить погрешность других методов. Метод прямоугольников завышает оценку всех компонент с погрешностью возрастающей с ростом номера нечетной компоненты, но дает меньший уровень несуществующих четных компонент в спектре меандра.
Для гармонического сигнала в первом столбце представлена относительная частота для времени преобразования равного четырем периодам сигнала. При этом строка «0» соответствует постоянной составляющей сигнала, строка «4» соответствует первой гармонике входного сигнала, строка «8» - второй гармонике, и т.д.

Промежуточные точки показывают паразитный уровень спектральных составляющих (фон), возникающих из-за неидеальности преобразования Фурье для переменного шага дискретизации сигнала.
Моделирование показало, что при использовании модернизированной формулы Симпсона погрешности, связанные с наличием шумового фона преобразования, значительно ниже. Уровень второй гармоники составляет всего 2,70*10-4 по отношению к первой, в то время как для метода прямоугольников 5,44*10-3.
Таким образом, для оценки параметров сигналов при переменном шаге дискретизации могут быть использованы модернизированные алгоритмы ДПФ. Метод прямоугольников следует использовать в задачах оценки характеристик сигналов, аппроксимируемых прямоугольниками. Модернизированную формулу Симпсона следует использовать в задачах оценки характеристик «плавно изменяющихся» сигналов, в частности сигналов близких к гармоническим.
2.2. Оценка параметров модуляции
Известны измерители модуляции, выделяющие мгновенные значения сигнала соответствующие максимальному значению напряжения несущей частоты. Они содержат АЦП и систему синхронизации. Вместе с тем известно, что преобразование Гильберта позволяет для сигнала  найти ортогональный сигнал
найти ортогональный сигнал  . Используя эти сигналы можно оценить в любой точке мгновенную амплитуду (огибающую) и мгновенную частоту исходного сигнала
. Используя эти сигналы можно оценить в любой точке мгновенную амплитуду (огибающую) и мгновенную частоту исходного сигнала  по формулам:
по формулам:
 ;
;
 .
.
По сравнению с известным методом, в процессе восстановления огибающей сигнала здесь не нужно выделять моменты времени соответствующие амплитудному значению напряжения несущей. Реализация преобразования Гильберта возможна через преобразование Фурье, поэтому необходимо рассмотреть особенности реализации преобразования Фурье в реальных условиях при получении массива данных с АЦП.
Особенности реализации преобразования Фурье
Когда АЦП работает в режиме стробирования, то его полоса пропускания может быть значительно больше fд/ 2. При стробировании с частотой дискретизации fд частота сигнала f на выходе гетеродинного преобразователя определяется выражением:
fСП = f - nfд, (2.2.1)
где n=ent(f/fд) - целое число. Еслиреализуется гетеродинное преобразование, то спектр сигнала на выходе АЦП должен быть расположен в диапазонах частот: от 0до fд/ 2или от fд/ 2до fд.
В общем случае частота измеряемого сигнала неизвестна, поэтому преобразование Фурье должно осуществляться на нецелом числе периодов сигнала, что приводит к явлению Гиббса, которое называют «растеканием» спектра. для уменьшения расширения спектральных линий на массив полученных дискретных отсчетов следует наложить временное непрямоугольное окно (Хемминга, Кайзера и др.). Эффект растекания необходимо также учесть путем сужения на величину bfд/N снизу и сверху границ рабочих частот. Тогда скорректированные диапазоны частот будут от bfд/N до fд/ 2 -bfд/N и от fд/ 2 +bfд/N до fд-bfд/N. Значение b показывает, на какое число спектральных составляющих растекается спектр, а также какое минимальное число периодов сигнала должно быть в окне преобразования. Реальные значения b для окна Кайзера и Хемминга могут находиться в пределах от 5 до 20.
Из-за особенностей преобразования Фурье гармоника, попадающая во второй частотный диапазон, зеркально отображается в первом, при этом, если ее номер во втором частотном диапазоне был N/2+z, то ее номер в первом частном диапазоне будет N/2-z. Таким образом, если частота гармоники после стробирования была fСП>fд/ 2, то ее частота в первом частотном диапазоне будет fд/ 2 - (fСП -fд/ 2) = fд-fСП.
Требования к точности определения несущей частоты сигнала f невысокие,так как ее значение используется только для корректировки шага дискретизации таким образом, чтобы спектр сигнала на выходе АЦП лежал в допустимых границах. Если погрешность оценки частоты велика, то она может быть учтена путем дополнительного сужения границ допустимых рабочих частот. С учетом абсолютной погрешности измерения частоты Df скорректированные диапазоны частот будут следующие: от bfд/N+Df до fд/ 2 -bfд/N -Df или от fд/ 2 +bfд/N+Df до fд-bfд/N-Df. Аналогично, путем сужения границ допустимых частот можно учесть погрешность установки частоты дискретизации. Если еще учесть абсолютную погрешность установки частоты дискретизации D fд, то для каждого значения n=ent(f/fд) получим два диапазона рабочих частот, нижние и верхние границы которых представлены в табл. 2.2.1.
Приведем пример проверки правильности выбора частоты дискретизации. Пусть f = 100,5МГц, fмод =10 кГц, fд =955,5 кГц, сигнал с AM, N= 512(число точек в массиве данных). Тогда получим:
n=ent(f /fд)= 105; fСП = f - nfд= 172,5 кГц;
fСП - fмод =162,5 кГц; fСП + fмод =182,5 кГц.
Таблица 2.2.1
| Диапазон рабочих частот
| Нижняя граница диапазона частот
| Верхняя граница диапазона частот
|
| Основной - «а»
| bfд/N+Df+nDfд
| fд/ 2 -bfд/N-Df -nDfд
|
| Дополнительный - «б»
| fд/ 2 +bfд/N+Df +nDfд
| fд-bfд/N-Df -nDfд
|
Для Dfд / fд=Df / f =10-5 оценим Df = f ´10-5 =1005 Гц, D fд = fд ´10-5 =9,555 Гц.
Рис. 2.2.1 поясняет условия работоспособности. Темным отмечена область частот, которая не удовлетворяет условиям «a» и «б».

Рис. 2.2.1. диапазоны рабочих частот
Проверим выполнение условия работоспособности для b =7:
а) fMIN >7 fд/N+DfВЧ+nDfд »15.1 кГц,
fMAX < fд/ 2 - 7 fд/N-DfВЧ -nDfд »462.7 кГц;
б) fMIN > fд/ 2 + 7 fд/N+DfВЧ +nDfд » 492.9 кГц,
fMAX < fд- 8 fд/N-DfВЧ -nDfд »938.6 кГц.
Откуда следует, что выполняется условие «а», следовательно, частота дискретизации выбрана правильно. Когда ни одно условие не выполняется, то необходимо подобрать частоту дискретизации.
Оценка параметров модуляции
Вариант схемы, реализующей метод оценки параметров модуляции сигнала с преобразованиями Фурье и Гильберта [4], приведен на рис. 2.2.2. Рассмотрим алгоритм работы вычислителя по шагам:
1. Измерение несущей частоты входного сигнала fВЧ.
2. Выбор такой частоты fд дискретизации АЦП, для которой будет выполняться одно из условий:
а) fMIN>bfд/N+DfВЧ+nDfд , fMAX <fд/ 2 -bfд/N-DfВЧ -nDfд ;
б) fMIN> fд/ 2 +bfд/N+DfВЧ +nDfд , fMAX <fд-bfд/N-DfВЧ - nDfд .
3. Дискретизация сигнала с частотой fд и получение массива u [ iTд ], где  - номер элемента в массиве мгновенных значений u [ iTд ].
- номер элемента в массиве мгновенных значений u [ iTд ].

Рис. 2.2.2. Схема оценки параметров модуляции сигнала
По методу Фурье-Гильберта
4. Нахождение максимального значения из массива AmAX =MAX(u [ iTд ]). Если P1 > AmAX / MAXАЦП >P2, то изменение коэффициента передачи входного устройства не проводится. Здесь: P1 и P2 – максимальный и минимальный коэффициенты использования динамического диапазона АЦП (можно выбрать P1= 0.9, P2= 0.5); MAXАЦП – предел шкалы АЦП. При необходимости изменения коэффициента передачи повторяются 3-й и 4-й шаги алгоритма. Правильный выбор коэффициента передачи обеспечит более полное использование рабочего диапазона АЦП, что будет способствовать высокой точности оцифровки. На рис. 2.2.3 показан пример исходного массива данных u [ iTд ]. На графике по оси OX отложено время в миллисекундах,по оси OY – относительная амплитуда.

рис. 2.2.3. пример массива данных u[iTд]
5. Наложение на дискретизированный массив временного окна Хемминга и получение массива u w[ iTд ]. На рис. 2.2.4 показан пример массива данных u w[ iTд ]. На графике по оси OX отложено время в миллисекундах,по оси OY – относительная амплитуда.

рис. 2.2.4. пример массива данных uw[iTд] после наложения окна
6. Нахождение преобразования Гильберта от массива u w[ iTд ].
Преобразование Гильберта находится через прямое (FFT) и обратное (RFT) преобразование Фурье:
 ,
,
где  ;
;
k=-j если i=0,1,2,3,…N/2;
k=j если i=N/2+1, N/2+2, N/2+3,…N-1.
7. Нахождение огибающей  .
.
Для восстановления амплитуды  каждый элемент массива необходимо разделить на функцию (массив коэффициентов) окна Хемминга. Из-за краевых эффектов, которые возникают при попадании в окно преобразования нецелого количества периодов входного сигнала, около 25% от начала и конца функции целесообразно отбросить. На рис. 2.2.5 показан пример массива данных . На графике по оси OX отложено время в миллисекундах,по оси OY – относительная амплитуда.
каждый элемент массива необходимо разделить на функцию (массив коэффициентов) окна Хемминга. Из-за краевых эффектов, которые возникают при попадании в окно преобразования нецелого количества периодов входного сигнала, около 25% от начала и конца функции целесообразно отбросить. На рис. 2.2.5 показан пример массива данных . На графике по оси OX отложено время в миллисекундах,по оси OY – относительная амплитуда.

рис. 2.2.5. Восстановленный АМ сигнал
8. Для симметричной формы огибающей коэффициент амплитудной модуляции (КАМ) находим по формуле
 ,
,
где AMAX =MAX(); AMIN =MIN().
9. Для оценки частотной модуляции необходимо вычислить производную от массивов X w, X w1. Ее можно найти, используя прямое и обратное преобразование Фурье:
 , где
, где  ;
;
 , где
, где  .
.
Здесь k=jwi если i=0,1,2,3,…N/2;
k=-jw (N-i)если i=N/2+1, N/2+2, N/2+3,…N-1.
10. После нахождения производных закон изменения частоты fСП будет описываться формулой:
 .
.
Из-за краевых эффектов, которые возникают при попадании в окно преобразования нецелого количества периодов входного сигнала, около 25% от начала и конца массива  целесообразно отбросить. На рис. 2.2.6 показан пример массива данных . На графике по оси OX отложено время в миллисекундах,по оси OY – мгновенная частота
целесообразно отбросить. На рис. 2.2.6 показан пример массива данных . На графике по оси OX отложено время в миллисекундах,по оси OY – мгновенная частота  в герцах.
в герцах.
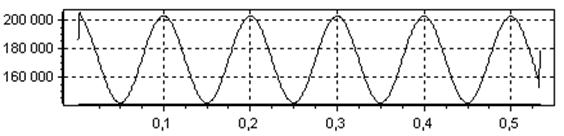
рис. 2.2.6. Восстановленный ЧМ сигнал
11. Для симметричной формы модулирующего сигнала девиация
 ,
,
где  =MAX(
=MAX( ),
),  =MIN().
=MIN().
Анализ погрешностей методом математического моделирования
Моделирование, представленное ниже, проводилось с применением к входному массиву данных окна Хемминга с коэффициентом a=0.5001 и количеством отсчетов в окне преобразования N =512. На приведенных графиках использованы следующие обозначения: f – несущая частота; fд – частота дискретизации; F – частота модулирующего сигнала; Fд – частота девиации.
Погрешности измерения глубины АМ
На рис. 2.2.7 и рис. 2.2.8 приведены зависимости погрешностей от величины АМ, для сигнала с параметрами F =1000 Гц, f =100 МГц, fд =95500 Гц. Из графиков следует, что паразитная ЧМ практически не влияет на погрешность измерения глубины АМ.

рис. 2.2.7. Зависимость погрешности измерения
глубины АМ от КАМ при паразитной ЧМ (Fд=3000 Гц)

рис. 2.2.8. Зависимость погрешности измерения





