Усилители
Усилители — это преобразователи, предназначенные для усиления слабого сигнала от датчика (порядка 10~4... 10~5 Вт) до уровня, требуемого для его обработки, и усиления маломощного управляющего сигнала до мощности, необходимой для управления исполнительным устройством системы (порядка 103 Вт) за счет внешнего источника энергии. По виду используемой энергии усилители, как и другие преобразователи, делят на электрические, гидравлические и пневматические.
В группу электрических усилителей входят электронные, магнитные, электромашинные и другие устройства, изменяющие параметры электрического сигнала. Усиление происходит за счет использования энергии стороннего источника питания: гидронасоса, пневмосети и в конечном счете электросети.
В ряде случаев усилители наряду с функцией усиления мощности выполняют функцию преобразования сигнала в другой вид, более удобный для работы системы управления (например, золотниковый гидрораспределитель с электромагнитным приводом).
Усилители выполняются как самостоятельные элементы либо входят в состав измерительных или исполнительных устройств и являются в этом случае их неотъемлемой частью. Как и другие элементы систем управления, усилители характеризуются статическими и динамическими характеристиками, перечисленными ранее.
Основными параметрами усилителей помимо коэффициента усиления (по току, напряжению, мощности) постоянной времени (инерционность) и рабочего диапазона частот являются:
• линейность статической характеристики;
• величина зоны нечувствительности;
• энергетические параметры (входная, выходная и потребляемая мощность);
• стабильность параметров при изменении условий внешней среды и по времени и их воспроизводимость при серийном производстве;
• долговечность, надежность, вибростойкость и т.д.
Возможный коэффициент усиления по мощности усилителей, применяемых в системах управления, лежит в диапазоне от 10 до 107. Выходная мощность усилителей, применяемых в системах управления, лежит в пределах от долей ватт до десятков киловатт. При мощности до 100 Вт обычно применяют электронные усилители, при большей требуемой мощности — гидро- и пневмоусилители.
Так как слабый сигнал от датчика или сравнивающего органа на пути до исполнительного устройства претерпевает серию преобразований и усиливается в миллионы раз, усиление происходит в несколько этапов, а сами усилители строят часто многокаскадными, состоящими в свою очередь из нескольких соединенных последовательно усилителей.
Важной характеристикой являются величина запаздывания и инерционность усилителя. Обычно можно считать безинерционными электронные усилители, гидравлические золотники, струнные реле. Наибольшим запаздыванием обладают магнитные и гидроусилители.
Усилители представляют обычно инерционным звеном первого порядка, характеризуемым передаточным коэффициентом (коэффициентом усиления усилителя) и постоянной времени. Динамические характеристики усилителей основных классов приведены в табл.4.1.
Таблица 4.1.
| Вид усилителя
| Основное применение усилителя
| Коэффициент усиления по мощности
| Постоянная времени, с
|
| Полупроводниковые
| Усилительный каскад на постоянном токе Усилительный каскад на переменном токе Оконечный усилитель мощности
| 103...105
104... 106
102...103
| 10-6... 10-7
10-2...10-2.
10 -2… 10-4
|
| Магнитные
| Усилительный каскад на переменном токе
| 103 …105
| 10 -1…10-4
|
| Электромашинные
| Оконечный усилитель мощности ;
| 102...104
| 1…10-2
|
| Гидравлические
| Дроссельные
Струйные
| 104...166
103...104
| 10-1…10-2
10-1... 10-2
|
| Пневматические
| Дроссельные
Струйные
| 105...107
103…105
| 10-2...10-3
10-3...10-4
|
Электронные усилители
Особенностью электронных усилителей является их способность усиливать маломощные сигналы порядка 10-6 Вт при напряжениях порядка 10-3 В, поэтому в системах управления их применяют в основном в маломощных цепях для обработки сигналов от датчиков, для согласования элементов системы управления по уровню или мощности сигналов, для выработки управляющего сигнала. По выходной мощности эти усилители уступают гидро- и пневмоусилителям тех же габаритов, поэтому для управления исполнительными устройствами они применяются не так широко.
По соотношению входного сопротивления усилителя ZBX и выходного сопротивления источника сигнала Zс усилители делятся:
на усилители напряжения — ZВХ ≥ 100 МОм >> Zc, ток во входной цепи усилителя Івх = 0 (источник работает в режиме холостого хода), усилитель практически не влияет на процессы в источнике (например, применяется для усиления сигналов с делителей напряжения типа неравновесных мостов);
усилители тока — Zвх<<Zc, источник сигнала работает в режиме, близком к короткому замыканию, ток во входной цепи усилителя Iв х задается источником;
усилители мощности — Р = IU: Z BX = Zc, ток и напряжение на входе усилителя определяются как источником сигнала, так и усилителем.
При проектировании цепи управления следует уделить внимание согласованию звеньев цепи по их входным и выходным сопротивлениям.
В настоящее время в основном применяются полупроводниковые усилители благодаря их малым габаритам, низкой потребляемой мощности и высокой надежности. Работа полупроводникового усилителя основывается на возможности управления током от эмиттера к коллектору транзистора путем изменения напряжения на базе. На рис. 3.31 приведена схема простейшего усилителя напряжения с общим эмиттером. Схема питается от источника, плюсовой контакт которого соединен с землей, а минусовой при помощи делителя R1, R2 устанавливает режим работы транзистора. Выходная цепь представляет собой делитель, в первом из плеч которого стоят Rэ, и транзистор, во втором — RK. Выходное напряжение снимается с первого плеча делителя. В зависимости от входного напряжения меняется ток Iк через Rэ, RK и выходное напряжение Uвых как падение напряжения на Rэ и транзисторе:

При закрытом транзисторе Iк= 0, падение напряжения на RK равно нулю и Uвых=Eп. При открытом транзисторе

Рис. 4.1. Усилительный каскад с общим эмиттером
На рис. 4.2 представлена схема двухкаскадного усилителя тока, оба каскада которого соответствуют рис. 4.1.
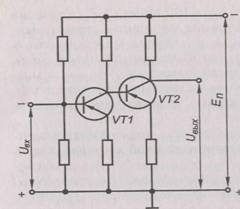
Рис. 4.2. Двухкаскадный усилитель
Такой усилитель имеет коэффициент усиления 30...200.
Основными характеристиками усилителей являются уровень собственных шумов и пороговая чувствительность — минимальное значение входного сигнала, при котором выходной сигнал мож- но отличить от собственных шумов с заданной вероятностью Р (при Р = 0,98 сигнал на выходе должен превышать шум в 3 раза).
Источником собственных шумов являются электромагнитные наводки, уменьшить которые можно экранированием, а также тепловые шумы и шумы усилительных элементов. Особенно вредны шумы во входной цепи и первом каскаде усиления усилителя, где их уровень соизмерим с уровнем полезного сигнала. Шумы усиливаются следующими каскадами усилителя вместе с полезным сигналом и передаются на выход усилителя.
Современные усилители кроме своей основной функции обычно осуществляют также фильтрацию входного сигнала, оставляя в нем только представляющие интерес для анализа частотные составляющие и удаляя помехи (например, наводки от электросети с частотой 50 Гц).
Различают следующие типы транзисторных усилителей:
усилители переменного тока, которые управляют мощностью переменного тока рабочей частоты (например, 50 Гц), подаваемого на электродвигатель синхронный или асинхронный;
усилители с импульсной модуляцией, предназначенные для усиления мощности импульсов, управляющих электромагнитными распределителями в гидро- и пневмоприводах, электромагнитными муфтами, шаговыми электродвигателями, электродвигателями, работающими в импульсном режиме, и т.д. (эти усилители также относятся к группе усилителей переменного тока);
усилители постоянного тока, предназначенные для усиления сигналов постоянного тока от датчиков, управления электромагнитными реле, согласования элементов системы управления по току и напряжению.
Магнитные усилители
Работа магнитных усилителей основана на особенностях свойств ферромагнитных материалов. Если по обмотке, расположенной на сердечнике, идет ток, то индуцированное им магнитное поле, характеризуемое напряженностью Н, взаимодействует с атомами материала сердечника и вызывает намагничивание сердечника, магнитный поток и магнитную индукцию В. На электромагнитные процессы влияет не сама напряженность магнитного поля Н, арезультат его взаимодействия с материалом сердечника — магнитная индукции В, которая может быть больше или меньше Н. Другими словами, магнитное поле может усиливаться или ослабляться средой в зависимости от ее свойств.
Отношение приращения индукции В к приращению напряженности магнитного поля Н называется абсолютной магнитной проницаемостью материала μо = ΔВ/ΔН и составляет для ферромагнетиков десятки тысяч. В случае небольшой напряженности поля Н магнитная проницаемость постоянна и В = μоН.
Принято считать, что материал достиг состояния насыщения при напряженности насыщения Нs и индукции насыщения Bs, когда с ростом Н не происходит роста В, а μа = ΔВ/ΔН = 0, что объясняется исчерпанностью возможности материала реагировать на усиление поля. Кривая зависимости магнитной индукции В от напряженности магнитного поля Н для ферромагнетиков имеет вид характеристики с петлей гистерезиса (см. рис. 3.2, д), где Х и У соответствуют Н и В. При уменьшении Н до нуля и росте в обратном направлении кривая В(Н) пройдет чуть левее за счет остаточных явлений в материале сердечника, при обратном изменении Н — аналогично, но правее.
Схема простейшего магнитного усилителя представлена на рис. 3.33, а. Магнитный усилитель состоит из двух дросселей / и II, охваченных обмоткой подмагничивания 2. Обмотки 1 и 3 переменного тока обоих дросселей намотаны на сердечники так, что переменные магнитные потоки внутри обмотки постоянного тока 2 имеют противоположные направления и компенсируют друг друга, не вызывая в обмотке 2 переменной ЭДС. Входной величиной усилителя является напряжение Е на обмотке подмагничивания 2, выходной величиной является переменный ток /н в обмотках 1 и 3 и нагрузке RH и напряжение
где 
— переменный ток;
R1 R2 — активные сопротивления обмоток 1 и 2, ω — частота переменного напряжения U;L1 и L2 — индуктивности обмоток 1 и 2. При росте тока подмагничивания возрастет постоянное магнитное поле, материал сердечника приближается к состоянию насыщения, его магнитная проницаемость μ0 уменьшается. Индуктивности L1 и 12 и реактивное сопротивление Z1=L1ω1),,


Рис. 4.3. Магнитный усилитель: 1 — 3 — обмотки
Z2 = L2ω2 дросселей 1, 2 вцепи переменного тока определяются как геометрией обмоток 1, 2, так и магнитной проницаемостью сердечников μ0, которая зависит от тока подмагничивания Iy в обмотке 3. Чем больше Iy (рис. 4.3, б), тем меньше μо сердечников, тем меньше индуктивности L1, и L2 и реактивные солротивления Z1, Z2 дросселей и тем больше ток нагрузки Ін.
На рис. 4.3, в показана характеристика рассмотренного магнитного усилителя. Затрачивая небольшую мощность на ток подмагничивания І у, можно управлять значительной мощностью и током нагрузки Iн.
Так как коэффициент усиления магнитного усилителя по току: kі = ІK/Іy определяется реактивным сопротивлением дросселем которое зависит от частоты переменного напряжения U, увеличение частоты с 50 до 500 Гц приводит к увеличению коэффициента усиления в 2 — 4 раза. Мощность магнитных усилителей достигает сотен киловатт при коэффициенте усиления 50...200 и КПД 0,6...0,98. Магнитные усилители нашли широкое применение в устройствах автоматики благодаря своей простоте и надежности. Главным недостатком усилителей этого типа является их инерционность, связанная с большой индуктивностью управляющей обмотки.
Электромашинные усилители
Электромашинные усилители (ЭМУ) применяют для управления мощными устройствами.
Простейший ЭМУ представляет собой генератор постоянного пока, вращаемый с постоянной скоростью (обычно — нерегулируемым 3-фазным асинхронным двигателем), который служит для усиления по мощности электрического сигнала, подаваемого на обмотку возбуждения.
Двухкаскадный ЭМУ получается, если два ЭМУ соединяются таким образом, чтобы выход первого ЭМУ подавался на обмотку возбуждения второго. Иногда двухкаскадное усиление с помошью ЭМУ получают путем установки на коллекторе генератора постоянного тока дополнительной пары короткозамкнутых щеток, расположенных перпендикулярно паре основных щеток. В этом случае создается дополнительная ЭДС, пропорциональная току через эту пару дополнительных щеток, что обеспечивает большее усиление исходного сигнала. Такой усилитель называют «ЭМУ с поперечным полем».
Гидро- и пневмоусилители
Усилители этой группы используют в качестве вспомогательного источника энергию жидкости под давлением или энергию сжатого воздуха.
Усилитель под управлением маломощного входного сигнала регулирует поток жидкости или газа, питающего привод, задавая тем самым мощность и величину перемещения рабочего органа.
Гидро- и пневмоусилители по принципу действия можно разбить на два класса: дроссельные и струйные.
К дроссельным усилителям относятся, например золотниковые Усилители. Золотниковым усилителем называют прецизионное механическое устройство, состоящее из специальной гильзы с дросселирующими окнами и плунжера, которое предназначено для перераспределения давления и расхода рабочей среды (масла, воздуха), поступающей по напорному трубопроводу. Золотники бы- вают плоские и цилиндрические.


Рис. 4.4. Золотниковые усилители
Рассмотрим схемы усилителей, построенных на базе цилиндрических золотников как наиболее распространенных.
На рис. 4.4 а, приведена схема отсечного золотника для управления двусторонним приводом (подача рабочего тела должна осуществляться то в одну, то в другую полость рабочего цилиндра). Золотник состоит из цилиндра 1 и плунжера 2, перемещающегося в цилиндре под действием управляющего воздействия X, перекрывающего окна 6 и 7 и управляющего подачей жидкости или газа в полости рабочего цилиндра. По трубе 3 подводится рабочая среда под давлением. Плунжер представляет собой двойной поршень и выполнен таким образом, что в среднем нейтральном положении он закрывает одновременно оба окна б и 7, отсекая поступление рабочей среды в рабочий цилиндр или из него.
При смещении плунжера вверх под действием входного воздействия X окно 6 соединяется через золотник с напорной трубой 3, окно 7 — сосливной трубой 5, что вызовет перемещение рабочего поршня вниз. Скорость рабочего поршня определяется проходным сечением частично перекрытых окон 6, 7 и положением поршней 2 плунжера. При перемещении плунжера вниз проходное сечение окон и подача жидкости или газа в окно б и из окна 7 будет постепенно уменьшаться до нуля (останов рабочего поршня при нейтральном положении плунжера), после чего уже окно 7 соединится с напорной трубой 3, а окно 6— со сливной трубой 4, что вызовет перемещение рабочего поршня в обратном направлении.
Золотниковые усилители этого типа позволяют получить на выходе мощность до 100 кВт при воздействии на плунжер сигналом мощностью несколько ватт (коэффициент усиления по мощности может достигать 105). Усилие перемещения плунжера составляет обычно 0,5...20 Н, ход плунжера — 2...10 мм и более.
На рис. 4.4, 6 приведена схема отсечного золотника для управления односторонним приводом, когда рабочий поршень перемещается под действием рабочей среды только в прямом направлении (обратное перемещение осуществляется за счет пружины). Плунжер имеет один поршень 2, перекрывающий окно 6 золотника, соединенное с одной из полостей рабочего цилиндра. В среднем нейтральном положении плунжер закрывает окно 6, блокируя подачу или спуск рабочей среды из рабочего цилиндра и обеспечивая его неподвижность. При смещении под действием входного воздействия плунжера вниз нижняя полость рабочего цилиндра соединяется через золотник с напорной трубой 3, что вызовет перемещение рабочего поршня вверх благодаря разности давлений в полостях цилиндра. При перемещении плунжера вверх вначале будет постепенно остановлено движение рабочего поршня вверх (при нейтральном положении плунжера), после чего полость рабочего цилиндра соединится со сливной трубой. Под действием пружины рабочий поршень пойдет вниз, выталкивая рабочую среду из нижней полости.
Схема и характеристика одностороннего привода с проточным золотником представлены на рис. 4.4 в, г. Плунжер золотника выполнен таким образом, что его цилиндры 2 меняют проходные сечения окон напорной 3 и сливной 4 труб, не перекрывая их целиком (за исключением крайних положений), так что через золотник имеется постоянный поток рабочей среды. В зависимости от положения плунжера меняется давление в камере золотника между цилиндрами и в нижней полости рабочего цилиндра. Поршень рабочего цилиндра всегда находится в равновесии под действием силы сжатия пружины сверху и давления рабочей среды снизу. Этот усилитель обладает высокой чувствительностью, отсутствием зоны нечувствительности, однако меньшей выходной мощностью.
Характерной особенностью золотниковых усилителем является наличие зазора между поршнями плунжера и гильзой, что обусловливает постоянную утечку рабочей среды. Разница между шириной поршня плунжера и размером окна гильзы золотника называется величиной перекрытия. По типу перекрытия различают золотники:
с положительным перекрытием, когда ширина поршня больше ширины окна гильзы;
нулевым перекрытием, когда ширина поршня равна ширине окна гильзы;
отрицательным перекрытием, когда цилиндр плунжера шире окна гильзы.
В целях получения более плотной отсечки цилиндры плунжера отсечного золотника выполняют шире окон (положительное перекрытие составляет 0,05...0,5 мм). При этом на характеристике возникает зона нечувствительности, что вызывает запаздывание срабатывания усилителя.
В проточном золотнике, наоборот, всегда имеется поток рабочей среды через золотник за счет отрицательного перекрытия.
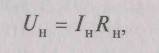
Рис. 4.5. Усилитель типа сопло-заслонка:
1 — дроссель; 2 - сопло дросселя; 3 — заслонка
На рис. 4.5 приведены схема усилителя типа сопло-заслонка, состоящего из дросселя 1 с постоянным гидравлическим сопротивлением и из дросселя с переменным гидравлическим сопротивлением, меняющимся при смещении заслонки 3 относительно сопла дросселя 2. Рабочая среда подается на дроссель 1 с постоянным давлением Ро и через дроссель 2 уходит на слив. Чем больше зазор между соплом 2 и заслонкой 3, тем больше расход рабочей среды через дроссели, тем больше падение давления на дросселе 1 и ближе давление в рабочей полости Рц к атмосферному.
В зависимости от положения заслонки 3 в полости между дросселями устанавливается давление, задающее положение рабочего поршня, находящегося в равновесии под действием силы упругости пружины и силы давления рабочей среды на поршень. Коэффициент усиления мощности таких усилителей может достигать kР =106
Струйные гидро- и пневмоусилители в качестве усилительного элемента используют струйную трубку (рис. 4.6), состоящую из поворотной трубки и приемника 5 с соплами 3, 4. В трубку подается рабочая среда под давлением. Управляющее воздействие Х поворачивает трубку 1, меняя направление струи рабочей среды, расход через сопла 3, 4 и давление в них.

Рис. 4.6. Струйный усилитель: а — конструктивная схема струйного усилителя; б— его статическая характеристика
Противовес 2 предназначен для удержания трубки в равновесном состоянии. При повороте трубки влево давление в канале 3 будет расти, в канале 4 — падать.
Струйные трубки работают под давлением масла порядка 4...8 бар при расходе через трубку 5... 10 л/мин. Максимальное отклонение трубки составляет обычно 1...2 мм.
Гидро- и пневмоусилители выполняют как однокаскадные (кР= 103... 104), так и двухкаскадные (кР= 104... 103).
Пневмоусилители имеют коэффициент усиления на порядок выше и инерционность на 1—2 порядка меньше, чем гидроусилители. Часто первый каскад усилителя выполняют пневматическим, второй — гидравлическим.
Корректирующие устройства
Корректирующим устройством называется сложная комбинация пропорциональных, интегральных, дифференциальных и других звеньев, корректирующая управляющий сигнал для обеспечения требуемых динамических характеристик системы. К этой группе устройств относятся последовательное корректирующее звено-регулятор и вспомогательные обратные связи в системах автоматического регулирования.
В зависимости от природы сигнала применяются электрические, механические, гидравлические, пневматические, комбинированные и цифровые корректирующие устройства. В электрических цепях систем управления в качестве корректирующих устройств используются схемы на резисторах, емкостях и индуктивностях, в механических узлах — пружины, гироскопы, рычаги обратных связей, в гидро- и пневмосистемах — дроссели, демпферы, каналы обратных связей.
Важными требованиями, предъявляемыми к корректирующим устройствам, являются возможность сложной коррекции амплитуд гармонических составляющих сигнала в зависимости от частоты и возможность адаптации структуры корректирующего устройства в процессе функционирования. В наибольшей степени этим требованиям удовлетворяют цифровые корректирующие устройства, реализуемые в виде программ микропроцессорных регуляторов.
Фильтрами называют частотно-избирательные устройства, пропускающие или задерживающие составляющие сигнала в зависимости от их частот. Различают аналоговые активные фильтры, выполненные в виде электронных схем на сопротивлениях и конденсаторах (RC-фильтры) и включаемые последовательно в цепь преобразования, и цифровые фильтры, являющиеся программами в цифровых регуляторах, по которым обрабатываются поступившие в регулятор последовательности замеров от датчиков. Существенным достоинством аналоговых фильтров является их простота и низкая стоимость, недостатком — ограниченные возможности и малая гибкость.
Преимуществом цифровых фильтров является возможность применения разнообразных и сложных алгоритмов фильтрации и гибкость, обеспечиваемая возможностью простого переключения регулятора с использования одной программы фильтрации на другую. Для цифровых фильтров характерна некоторая задержка сигнала по времени, необходимая для выполнения расчетов.
Рост быстродействия современных микропроцессоров снизил задержку даже при сложной цифровой фильтрации до нескольких миллисекунд, что в большинстве случаев применения практически оказывается незаметным.
Различают фильтры:
• низкочастотные (ФНЧ), пропускающие гармоники низкой частоты и подавляющие высокочастотные гармоники;
• высокочастотные (ФВЧ), пропускающие только высокочастотные гармоники;
• полосовые (ПФ), пропускающие гармоники только в заданном частотном диапазоне;
• режекторные (РФ), подавляющие гармоники в заданном частотном диапазоне (например, сетевую наводку на частоте 50 Гц).
Реальные системы управления часто функционируют в условиях мощных электромагнитных излучений, порождаемых электросетью и силовым электромагнитным оборудованием (трансформаторами, электродвигателями, переключателями и т.д). Мощность электромагнитной помехи, наводимой на соединительные цепи, может быть соизмерима с мощностью электрического сигнала от датчика типа термопары, что отрицательно влияет на качество регулирования. Для борьбы с электромагниными помехами применяют различные методы. За счет фильтрации помеха, например, от сети питания 50 Гц может быть ослаблена в десятки раз.
Простая скрутка пары соединительных проводов снижает наводки в 10 раз, причем, чем меньше шаг скрутки, тем меньше уровень помех. Одним из основных методов является защитное экранирование: низковольтные цепи заключают в металлический кожух и применяют экранированный провод, состоящий из одной или нескольких изолированных медных жил, заключенных в экран, сплетенный из тонких медных проводов. Наиболее эффективны непрерывные экраны.
Иногда целесообразно экранирование источника помехи, например электродвигателя, заключением его в сплошной металлический заземленный экран. Экранирование позволяет снизить уровень помех в десятки раз.
Одним из источников помех является неудачная схема заземления источника и приемника сигнала. Уровень помех в зависимости от схемы заземления может изменяться в несколько раз.
Следует отметить, что борьба с помехами является во многом искусством и применение рекомендуемых методов часто недостаточно для снижения помехи до требуемого уровня.
Электромагнитные реле
Некоторые характеристики электромагнитных и электронных реле приведены в табл. 4.2.
Таблица 4.2
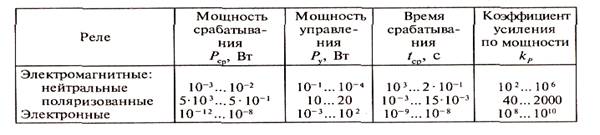
Электромагнитное реле — типовой элемент автоматики, управляющий подачей значительной мощности источника питания в нагрузку, переключая контакты реле за счет использования небольшой мощности в цепи управления. Реле в общем случае представляют собой промежуточный элемент, приводящий в действие одну или несколько электрических цепей.
По сравнению с бесконтактными полупроводниковыми переключателями (транзисторами и тиристорами) контактные реле обладают следующими преимуществами:
устойчивостью к изменению температуры;
широким диапазоном коммутируемых токов и напряжений;
устойчивостью к электрическим перегрузкам как на контактах, так и в цепи управления;
радиационной стойкостью;
возможностью коммутации большого числа гальванически развязанных цепей;
небольшими массой, габаритными размерами, стоимостью.
Существуют реле постоянного и переменного тока. В основном применяются реле постоянного тока, подразделяемые на нейтральные и поляризованные.
Основными параметрами, характеризующими работу реле являются;
мощность срабатывания Рсраб - электрическая мощность на входе реле, при которой ПРОИСХОДИТ замыкание (размыкание) контактов (0,001…0,1В)
время срабатывания - время между моментом подачи на реле управляющего импульса и моментом замыкания контактов управляемой цепи (0,001...0,2 с);
мощность управления Рупр - электрическая мощность управляемой цепи (10... 1000 Вт и более).
Коэффициент усиления по мощности для реле, иногда называемый коэффициентом управления, определяется как  и составляет 40... 10s.
и составляет 40... 10s.
Вместо контактных электромагнитных реле все чаще применяют полупроводниковые ключи, построенные на базе транзисторов и тиристоров. Простейший ключ на транзисторе (рис.4.7, а) представляет собой усилитель с релейной характеристикой. При наличии напряжения на базе транзистор пропускает ток его сопротивление в цепи эмиттер-коллектор мало. При отсутствии напряжения на базе транзистор закрыт, ток от эмиттера к коллектору и в выходной цепи отсутствует.
Тиристор - это полупроводниковый четырехслойный прибор способный, подобно диоду, пропускать ток только в одну сторону, причем ток пойдет только при наличии на управляющем электроде открывающего напряжения. Когда входной сигнал достигает заданного уровня (рис.4.7, б), сопротивление ключа мало (ключ открыт); если входной сигнал ниже заданного порогового -сопротивление ключа велико (ключ закрыт). После снятия управляюшего сигнала тиристор будет пропускать ток еще некоторое время, пока не закроется, поэтому тиристоры называют приборами с неполной управляемостью.
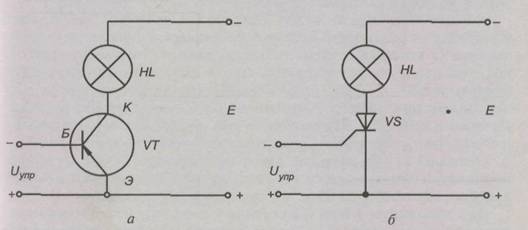
Рис. 4.7. Ключи на транзисторе (а) и тиристоре (б)
Тиристор имеет релейную характеристику при двух устойчивых состояниях — открытом и закрытом. Для ускорения запирания тиристора применяют специальные схемы.
Переключение полупроводниковых ключей занимает несколько микросекунд, т.е. происходит практически мгновенно. Полупроводниковые ключи имеют малые габаритные размеры, большую механическую прочность, устойчиво работают в диапазоне температур — 60... 150 0С, способны пропускать токи до 300 А.
Подобие некоторых физических свойств жидкостей и газов объясняет подобие конструкций гидро- и пневмораспределителей. Так же как и усилители, они подразделяются по типу распределительного элемента на распределители давления и расхода золотникового типа, распределители с соплом и заслонкой, распределители струйного типа, распределители клапанного типа и комбинированные.
Электромеханические муфты
Управляемые муфты служат для передачи движения от одного вала к другому по сигналам управления и являются дистанционными управляемыми выключателями механического движения. С помощью муфт осуществляется быстрое подключение или отключение и торможение элементов управляемого объекта от постоянно работающего электродвигателя. Муфты позволяют плавно регулировать частоту вращения ведомого вала и передаваемый на него момент за счет регулируемого проскальзывания ведущем и ведомого элементов муфты, что важно для предотвращения аварии в момент резкого возрастания нагрузки на привод (например, в момент включения муфты).
По характеру связи между ведущим и ведомым элементами конструкции различают муфты с механической связью, или фрикционные (в которых степень проскальзывания полумуфт друг относительно друга регулируется силой сжатия контактирующих поверхностей), и муфты, передающие крутящий момент за счет взаимодействия электромагнитных полей полумуфт без их механического контакта. Это гистерезисные, индукционные (синхронные и асинхронные ) и конденсаторные электромагнитные муфты.
Основными критериями работоспособности муфт являются, прочность сцепления, или максимальный передаваемый момент, износостойкость поверхностей трения, теплостойкость.
Для дополнительного увеличения коэффициента трения и передаваемого момента в 3 — 4 раза соприкасающиеся поверхности полумуфт изготавливают из специальных материалов. В сухих фриционных муфтах применяют трение стали или чугуна по накладкам из фрикционного материала на асбестовой основе или по металлокерамическим накладкам. Фрикционные тела муфт, работающих в масле, выполняют из закаленной стали, трущейся по фрикционной пластмассе или металлокерамике.
В электромагнитных муфтах полумуфты образуют замкнутую магнитную систему. Муфта выполнена из ферромагнитных материалов и имеет одну или несколько обмоток возбуждения. Постоянный ток подается на вращающуюся катушку по контактным кольцам и щеткам.
В маломощных фрикционных муфтах сами подвижные полумуфты не имеют обмоток (рис. 4.8, а), одна из них (обычно ведомая) перемещается под действием магнитного поля неподвижной обмотки возбуждения, сцепляясь со второй полумуфтой. При подаче тока в обмотку 3 возникает магнитное поле, перемещающее вдоль ведомого вала по шлицам или шпонке и прижимающее ведомый элемент муфты 2 к ведущему 1. Для передачи больших моментов применяют многодисковые муфты с подвижной катушкой электромагнита (рис.4.8,б), в которых площадь соприкосновения ведущей и ведомой полумуфт в несколько раз больше. При отключении тока пружина отжимает ведомую полумуфту от ведущей и прижимает ее к тормозной поверхности, чем обеспечивается быстрое торможение. Работа такой муфты подобна работе электромагнита.
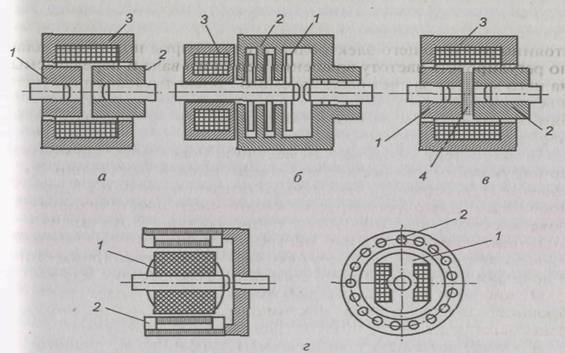
Рис. 4.8. Электромагнитные муфты
Наряду с дисковыми применяют конусные и цилиндрические обжимные муфты, позволяющие передавать большие моменты однако они имеют значительные габариты и конструктивно слои нее, что обусловило ограниченность их применения.
Зазор между полумуфтами может быть заполнен ферромагнитным порошком 4 (рис. 4.8, в). Под действием магнитного поля при включении муфты зерна порошка располагаются вдоль силовых линий и образуют мостики, связывающие полумуфты. Сопротивление сдвигу намагниченного порошка тем больше, чем сильнее он намагничен, что позволяет легко управлять передаваемым моментом. Порошок состоит из зерен диаметром от 4 до 50 мкм и может быть сухим (графит, тальк) или жидким, пропитанным силиконовыми, трансформаторными маслами, фтористыми соединениями
Электромагнитные фрикционные муфты с ферромагнитным наполнителем более надежны и менее инерционны (время срабатывания составляет менее 20 мс), имеют больший КПД. К недостаткам следует отнести сложность конструкции, постоянные потери ферромагнитного порошка через уплотнения, необходимость периодической смены порошка (в среднем через 400... 500ч работы) ввиду постепенного окисления и разрушения зерен порошка.
В асинхронных индукционных муфтах передаваемый момент управляется изменением напряжения на обмотке возбуждения индуктора. Такие муфты способны передавать мощность от нескольких ватт до тысяч киловатт. Одна из полумуфт (рис.4.8, г) имеет электромагнитные полюсы 1 с обмоткой возбуждения (индуктором), конструктивно выполненной подобно ротору асинхронного двигателя и питаемой постоянным током. Другая полумуфта имеет короткозамкнутую обмотку 2, аналогичную роторной обмотке асинхронного двигателя. При вращении индуктора в обмотке якоря возникает ЭДС и идет ток. Взаимодействие этого тока с магнитным потоком возбуждения создает электромагнитный момент, приводящий во враще






