Для регулирования выходного напряжения введём в схему обратную связь по току и сделаем систему замкнутой.
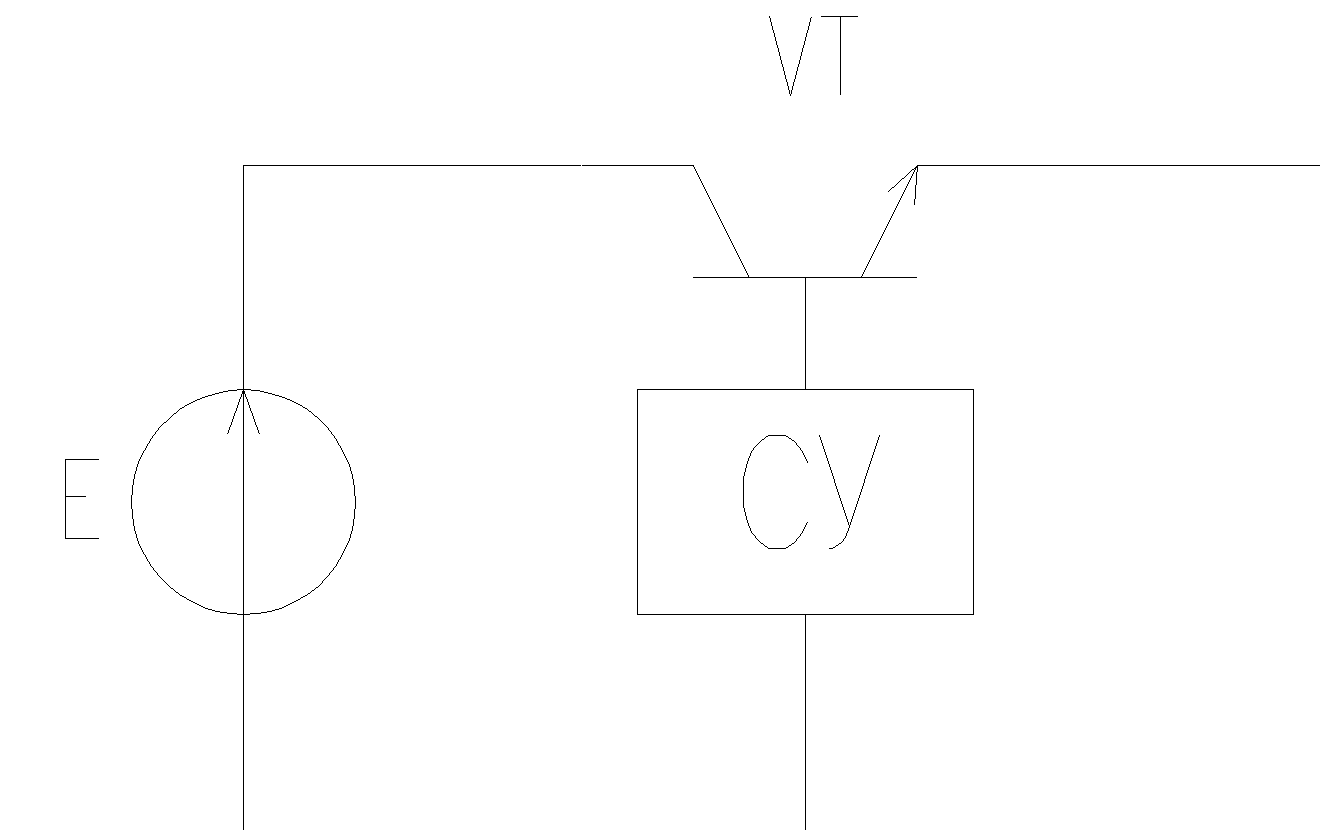
Рис. 28. Принципиальная схема с обратной связью.
Рассчитаем передаточную функцию замкнутого контура:

Для определения передаточной функции компенсатора, рассчитаем передаточную функцию замкнутого контура при условии, что  .
.
В ветвь регулятора с нагрузкой R1 подключим источник напряжения, управляемый током. Установим значение коэффициента передачи  . Тогда при токе нагрузки 2 А, напряжение на выходе источника будет 2 В. Таким образом обратная связь будет сделана по току, а в расчёте передаточной функции будем использовать напряжение источника напряжения, управляемого током нагрузки.
. Тогда при токе нагрузки 2 А, напряжение на выходе источника будет 2 В. Таким образом обратная связь будет сделана по току, а в расчёте передаточной функции будем использовать напряжение источника напряжения, управляемого током нагрузки.
Тогда, коэффициент преобразования датчика рассчитаем исходя из значений опорного напряжения и требуемого напряжения источника по следующей формуле

Для расчета коэффициента преобразования датчика зададимся значением  , тогда для напряжения источника равного 2 В получим
, тогда для напряжения источника равного 2 В получим

Передаточная функция ШИМ модулятора рассчитывается исходя из амплитуды напряжения на выходе генератора пилообразного напряжения

Сделаем ГПН с амплитудой выходного напряжения 1 В. Тогда

Рис. 29. К расчёту передаточной функции ШИМ модулятора.
В общем случае, передаточная функция по управлению инвертирующего регулятора, может быть представлена в следующем виде:
Коэффициенты передаточной функции рассчитаем по следующим формулам:




Следовательно, передаточная функция регулятора имеет вид:

Сформируем модель звена обратной связи нашего регулятора:

Рис. 30. Математическая модель обратной связи.
Построим ЛАЧХ и ФЧХ звена обратной связи регулятора. Для этого в Analysis Setup выбираем пункт AC Sweep. В нём устанавливаем следующие параметры:
AC Sweep Type: Decade
Sweep Parameters: Pts/Decade: 101
Start Freq.: 10
End Freq.: 1Meg

Рис. 31. ЛАЧХ и ФЧХ звена обратной связи регулятора
Из графика рис. 31 видно, что замкнутая система не устойчива, т.к. на частоте среза, приблизительно равной 315 Гц, фаза больше 180 градусов.
Чтобы сделать систему устойчивой введём звено коррекции.
Перед определением передаточной функции компенсатора зададимся новой частотой среза, значение которой должно лежать на интервале от 1,1ω0 до 0,9ωZ. В нашем случае зададимся  .Увеличение частоты среза с 1979 рад/с (315 Гц) до 5027 рад/с (800 Гц) позволяет повысить быстродействие системы в переходных режимах.
.Увеличение частоты среза с 1979 рад/с (315 Гц) до 5027 рад/с (800 Гц) позволяет повысить быстродействие системы в переходных режимах.
Используя рис. 32, для желаемой величины перерегулирования Q определим запас устойчивости по фазе. Выбор величины Q влияет на скорость переходного процесса, а так же на величину перенапряжений. Для нашей системы управления зададимся Q = 0,5, следовательно, 

Рис. 32. Зависимость величины перерегулирования от запаса по фазе
Для нахождения коэффициента усиления компенсатора на частоте среза  (
( ) определим значение ЛАЧХ Tu(s) на этой частоте. Так как на интервале от 315 Гц до 800 Гц ЛАЧХ имеет наклон - 40 dB, то значение ЛАЧХ на частоте 0,8 кГц можно рассчитать следующим образом:
) определим значение ЛАЧХ Tu(s) на этой частоте. Так как на интервале от 315 Гц до 800 Гц ЛАЧХ имеет наклон - 40 dB, то значение ЛАЧХ на частоте 0,8 кГц можно рассчитать следующим образом:



Следовательно, на частоте среза коэффициент усиления компенсатора должен быть равен 17,236 dB или 7,27. Определим частоты нуля и полюса компенсатора для :


Найдем значение нулевого коэффициента усиления компенсатора исходя из того, что на частоте коэффициент усиления ПД-компенсатора должен быть равен 7,27:

Рассчитаем параметры интегрирующего звена исходя из условия, что  :
:

Следовательно, передаточная функция проектируемого ПИД - компенсатора имеет вид:

Построим характеристики рассчитанного ПИД – компенсатора в программном комплексе OrCAD (рис. 33). При моделировании, для обеспечения сходимости расчета, в знаменатель передаточной функции интегрирующего звена добавляется малое число ( ). Таким образом, передаточная функция ПИД компенсатора приобретает следующий вид:
). Таким образом, передаточная функция ПИД компенсатора приобретает следующий вид:


Рис. 33. ЛАЧХ и ФЧХ ПИД – регулятора.
Зная передаточную функцию, рассчитаем параметры элементов ПИД компенсатора представленного на рис. 34.

Рис. 34. Схема ПИД – компенсатора.
Найдем величины сопротивлений и емкостей конденсаторов в схеме ПИД - компенсатора, для этого зададимся значением  :
:





Соберём схему с обратной связью по току в программном комплексе OrCad (рис. 35). Сопротивление R4 ПИД – регулятора убираем из цепи – делаем разрыв. Названия сопротивлений и ёмкостей на рис. 34 и на схеме будут отличаться, т.к. значения R1 и C1 уже использовались в схеме. Перед ШИМ-модулятором opamp устанавливаем блок VPWL, ограничивающий коэффициент заполнения γ в диапазоне 0,1-0,85. Во всех ёмкостях и индуктивностях L и C схемы устанавливаем начальное значение тока Ic=0. Значение опорного напряжения устанавливаю  , чтобы ток на нагрузке был максимально приближённым к 2 А.
, чтобы ток на нагрузке был максимально приближённым к 2 А.

Рис. 35. Схема инвертирующего регулятора с обратной связью по напряжению.
Приведем полученные графики напряжения и тока на нагрузке регулятора с обратной связью по току в пусковом и установившемся режиме.

Рис. 36. Графики напряжения и тока на нагрузке в пусковом режиме
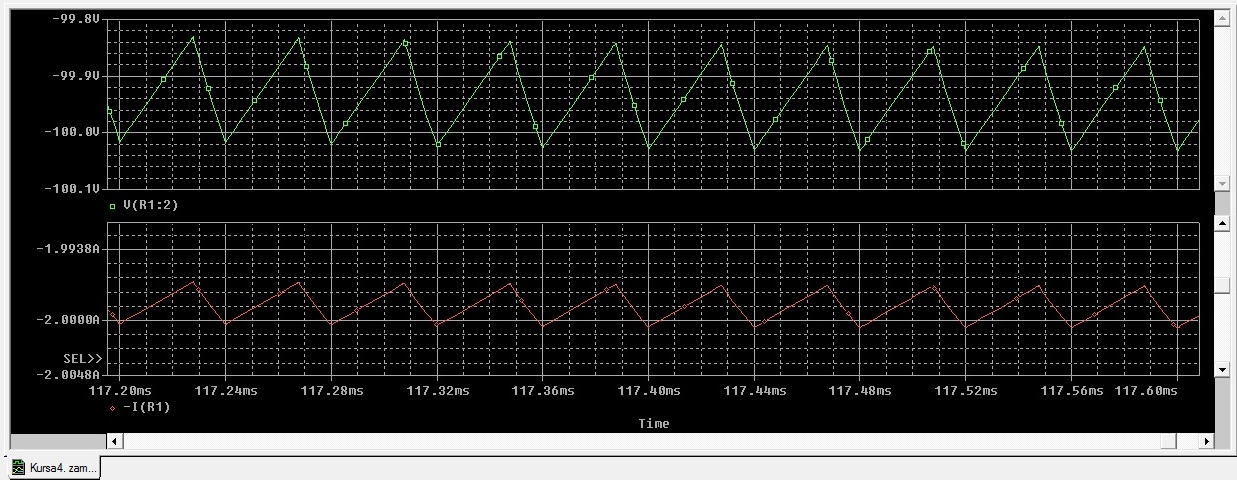
Рис. 37. Графики напряжения и тока на нагрузке в установившемся режиме.
2.8. Построить входную характеристику  регулятора:
регулятора:
Изменяем значение входного напряжения в диапазоне  и измерим значение выходного напряжения. Построим входную характеристику.
и измерим значение выходного напряжения. Построим входную характеристику.

Рис. 38. Входная характеристика регулятора. Пусковой режим.

Рис. 39. Входная характеристика регулятора. Установившийся режим.
На рис. 39 видно, что выходное напряжение колеблется около значения 100 В. По графику определим коэффициент пульсаций:








Снимем показания в крайней правой точке графика и построим входную характеристику по полученным точкам:
| Е, В
| 31,5
|
| 40,5
|
| 49,5
|
| 58,5
|
| Uвых, В
| 99,792
| 99,894
| 99,877
| 99,894
| 99,953
| 99,77
| 99,95
|
Таблица 4. Входная характеристика регулятора.

Рис. 40. Входная характеристика регулятора.
В системе с обратной связью выходное напряжение поддерживается на одном уровне при изменении входного напряжения. Обратная связь осуществляет качественное регулирование напряжения, так как мы должны поддерживать на нагрузке требуемое напряжение постоянно, в не зависимости от каких-либо скачков входного напряжения. Однако, в моём регуляторе существуют скачки выходного напряжения, что объясняется..
2.9. Построить нагрузочную характеристику  (диапазон изменения
(диапазон изменения  ) при различных значениях коэффициента усиления обратной связи.
) при различных значениях коэффициента усиления обратной связи.
Для построения нагрузочной характеристики при различных коэффициентах усиления, введём в схему блок Parameters. Зададим в нём R1 и  . Учтём, что от коэффициента усиления зависят значения сопротивления R5 и конденсатора C3. Зададим их в блоке parameters как функцию . Т.к. по заданию обратная связь по току, то на нагрузке будем снимать не напряжение, а ток.
. Учтём, что от коэффициента усиления зависят значения сопротивления R5 и конденсатора C3. Зададим их в блоке parameters как функцию . Т.к. по заданию обратная связь по току, то на нагрузке будем снимать не напряжение, а ток.

Рис. 41. Математическая модель регулятора c обратной связью по току.
Величину сопротивления R1 будем изменять в диапазоне 25-75 Ом с шагом 5 Ом. Коэффициент усиления обратной связи возьмём: 0,1; 0,896; 10, 100.

Рис. 42. Диаграмма напряжения на выходе регулятора при  .
.
Т.к. значения тока на нагрузке схемы имеют некоторые пульсации, в таблицу 5 занесём значения Iвых при t=120 мс. Аналогично будем поступать при других значениях коэффициента усиления.
Таблица 5. Нагрузочная характеристика при .
| R1, Ом
|
|
|
|
|
|
|
|
|
|
|
|
| Iн, В
| 2,012
| 2,024
| 2,001
| 2,002
| 2,008
| 2,004
| 2,005
| 1,985
| 2,157
| 1,951
| 1,995
|

Рис. 43. Диаграмма напряжения на выходе регулятора при  .
.
Таблица 6. Нагрузочная характеристика при .
| R1, Ом
|
|
|
|
|
|
|
|
|
|
|
|
| Iн, В
| 1,993
| 2,002
| 2,001
| 2,001
| 2,002
| 2,001
|
| 2,001
| 2,001
| 2,003
| 2,001
|

Рис. 44. Диаграмма напряжения на выходе регулятора при  .
.
Таблица 7. Нагрузочная характеристика при .
| R1, Ом
|
|
|
|
|
|
|
|
|
|
|
|
| Iн, В
| 2,135
| 2,028
| 2,118
| 2,068
| 2,073
| 2,04
|
| 1,968
| 2,051
|
| 1,996
|

Рис. 45. Диаграмма напряжения на выходе регулятора при  .
.
Таблица 8. Нагрузочная характеристика при .
| R1, Ом
|
|
|
|
|
|
|
|
|
|
|
|
| Iн, В
| 2,298
| 2,009
| 2,098
| 2,162
| 2,028
| 2,007
| 1,987
| 2,066
| 2,048
| 2,028
| 1,995
|
Так как регулятор с обратной связью по току, то выходной ток должен поддерживаться постоянным при любых изменениях нагрузки. Из полученных диаграмм видно, что оптимальным коэффициентом усиления обратной связи является , при больших и меньших значениях коэффициента усиления выходной ток не совсем точно поддерживается на требуемом уровне.

Рис. 46. Нагрузочная характеристика регулятора для различных значений коэффициента усиления .





