Электропривод с двигателем постоянного тока с независимым возбуждением.
Теоретические сведения.
Двигатели постоянного тока (ДПТ) широко применяются в промышленных, транспортных и других установках, где необходимо плавное регулирование скорости вращения (прокатные станы, металлорежущие станки, электрическая тяга на транспорте и. т. п.). В зависимости от способа электромагнитного возбуждения ДПТ подразделяют на ДПТ с независимым, последовательным и смешанным возбуждением. Иногда встречается название ДПТ с параллельным возбуждением, но необходимо учесть, что такой ДПТ является частным случаем ДПТ с НВ и этот термин применяется как доопределяющий.
Схема включения ДПТ с независимым возбуждением (ДПТ с НВ) приведена на рис. 2.1. Для ДПТ с НВ справедлива система уравнений, описывающая его статическое состояние:
U=IR+E
Е=с  ; (2.1)
; (2.1)
М=сI;
где U - напряжение на якорной цепи, В; R - суммарная сопротивление якорной цепи, Ом; М - электромагнитный момент, Нм; I -ток якоря, А; - угловая скорость двигателя, рад/с; Е - ЭДС вращения якоря, В; с = кФ - коэффициент пропорциональности, Вс; к = pN/2na - постоянная ДПТ (р - число пар полюсов; N - число активных проводников якорной обмотки; а - число пар параллельных ветвей якорной обмотки) Ф - магнитный поток, Вб.
Решая первые два уравнения в системе (2.1) относительно Е, можно получить известное уравнение электромеханической характеристики ДПТ
 , (2.2)
, (2.2)
которое определяет зависимость = f(I).
С учетом третьего уравнения в (2.1) уравнение (2.2) можно переписать в виде зависимости w=f(M) которая определяет механическую характеристику ДПТ:
 , (2.3)
, (2.3)
или
 (2.4)
(2.4)
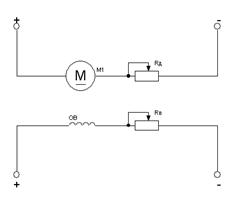
Рис. 2.1. Схема включения ДПТ с НВ
которое определяет зависимость = f(I).
Данное уравнение механической характеристики определяет зависимость скорости вращения от момента на валу двигателя, т.к. в статике вращающий момент равен моменту сопротивления Мс на валу ДПТ, то это уравнение определяет зависимость от Мс, прикладываемого к валу.
Стоит сказать, что здесь мы оперируем величиной электромагнитного момента М, который превышает выходной момент на валу на величину, соответствующую потерям в стали и механическим потерям от трения, но в большинстве практических расчетов можно считать, что эти моменты равны. Коэффициент пропорциональности с = кФ можно считать постоянным для тех ДПТ с НВ, у которых имеются компенсационные обмотки или в случае, когда можно пренебречь влиянием реакции якоря на величину Ф. Вообще-то влияние поперечной реакции якоря на Ф ведет к нарушению линейности механической характеристики по мере увеличения тока.
Из анализа уравнения электромеханической характеристики (формула 2.2) видно, что она может быть представлена прямой линией (рис. 2.2) при неизменных напряжении U, магнитном потоке Ф, создаваемом ОВ и сопротивлением якорной цепи R. Если U = Uном, Ф = Фном и Rд = 0, электромеханическая характеристика называется естественной. При изменении хотя бы одного из указанных параметров электромеханическая характеристика называется искусственной. Таким образом, можно отметить, что ДПТ с НВ обладает лишь одной естественной характеристикой и множеством искусственных.
Нетрудно видеть, что в случае, если I=0, имеет место режим идеального холостого хода и при этом  =
=  = U/кФ == U/c, т.е.
= U/кФ == U/c, т.е.  и
и  .
.
С увеличением нагрузки на валу ДПТ возрастает и ток якоря I, т.к. М == сI, а это в свою очередь ведет к падению . В случае, если = 0, то при подведенном к якорю напряжении имеет место режим короткого замыкания, при котором из уравнения (2.2) следует, что Iкз = U/R. Максимальное значение тока короткого замыкания имеет место при Rд = 0, когда R = Rя (Rя - собственное сопротивление обмотки якоря), и оно может в десятки раз превышать величину Iн двигателя, т.к. Iя величина достаточно малая. Реально режим короткого замыкания имеет место, кратковременно, при пуске двигателя и при стопорении двигателя моментом сопротивления.
Рис. 2.2. Механическая и электромеханическая характеристики ДПТ с НВ
При прямом пуске двигателя ударные значения тока Iкз>>Iн, поэтому якорная обмотка может быстро перегреться и выйти из строя, кроме того, большие токи негативно влияют и на работоспособность щеточно-коллекторного узла. Cказанное обуславливает необходимость ограниченияIкз до какой-либо приемлемой величины, либо введением дополнительного сопротивления в якорную цепь Rд, либо уменьшением питающего напряжения U. Величина максимально допустимого тока определяется коэффициентом перегрузки по току Кт, обычно принимающим значения от 2 до 5, в зависимости от типа двигателя. Максимально допустимый ток короткого замыкания должен соответствовать неравенству:
 . (2.5)
. (2.5)
Для микродвигателей обычно осуществляется прямой пуск без добавочных сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск, особенно если привод с ДПТ используется в напряженных режимах с частыми пусками и торможениями. Практически надо помнить, что только частыми пусками можно «сжечь» ДПТ, если конечно не ограничивать пусковые токи. С введением Rд в цепь якоря жесткость электромеханической характеристики уменьшается, что и видно из рисунка 2.2.
Из выражения (2.4) следует, что графически механическая характеристика ДПТ с НВ может быть представлена прямой линией с двумя характерными точками - скоростью холостого хода wо и моментом короткого замыкания Мкз, который также называется пусковым. Величина Мкз определяется как Мкз = сIкз = кФU/R. С введением добавочного сопротивления Rд в цепь якоря жесткость механических характеристик также падает, что с успехом используется при регулировании скорости вращения.
Уравнения механической характеристики можно переписать в виде:
 , (2.6)
, (2.6)
где  = MR/ (кФ)
= MR/ (кФ)  = MR/c - перепад скорости, a R = Rя + Rд.
= MR/c - перепад скорости, a R = Rя + Rд.
С учетом пропорциональной связи между I и М следует, что график механической и электромеханической характеристик один и тот - же при соответствующем масштабировании по оси абсцисс величин I и М, поэтому часто обозначение по оси абсцисс приводится как М (I).
Из уравнения механической характеристики (2.4) следует, что принципиально может регулироваться изменением напряжения U, магнитного потока Ф, создаваемого ОВ, и сопротивления якорной цепи R.
Одним из основных показателей, характеризующих способы регулирования скорости является диапазон регулирования D, который в электроприводе определяется как отношение максимальной скорости вращения max к минимальной min
D =  . (2.7)
. (2.7)
Как правило, диапазон регулирования представляют в числах в виде соотношения, например100:1 и т.д. Естественно, диапазон регулирования увязывается с требуемой стабильностью скорости при заданном отклонении момента.
Как следует из выражения (2.4), при изменении питающего напряжения можно получить семейство параллельных механических характеристик (рис. 2.3).
Практически имеется возможность только уменьшать напряжение питания якоря относительно его номинального значения Uн, т.е. при регулировании скорости изменением U должно выполнятся неравенство:
U  Uн, (2.8)
Uн, (2.8)
при этом скорость вращения можно регулировать только вниз от основной, соответствующей естественной характеристике. Это обусловлено тем, что уже на стадии своего проектирования ДПТ рассчитывается на конкретное номинальное напряжение, и превышение которого может привести к пробою изоляции. Напряжение на якоре может регулироваться различными электромашинными и статическими устройствами.
Рис. 2.3. Механические характеристики ДПТ с НВ при различных напряжениях на якоре Uном>U1>U2
Из уравнения механической характеристики (2.4) следует, что, например, при постоянном моменте сопротивления Мс на валу можно получить различные установившиеся угловые скорости ниже основной введением в цепь якоря добавочного сопротивления (рис. 2.1). Жесткость механических характеристик уменьшается с увеличением величины добавочного сопротивления Rд. Диапазон регулирования скорости практически не превышает 2:1. Способ характеризуется большими тепловыми потерями на добавочном сопротивлении Rд.
При введении добавочного сопротивления Rв в цепь обмотки возбуждения можно изменять величину магнитного потока двигателя Ф в сторону уменьшения от его номинального значения Фн, которое достигается при Rв = 0.
Как нетрудно видеть из уравнения электромеханической характеристики (2.2), для различных значений потока Ф можно получить семейство электромеханических характеристик, представленное на рис. 2.4.
Угловая скорость идеального холостого хода w0 определяется следующим выражением:  . На рис. 2.4 нижняя характеристика соответствует номинальному потоку возбуждения Фн. Если при этом добавочное сопротивление в якорной цепи Rд равно 0 и якорь запитывается номинальным напряжением Uн,то эта характеристика будет естественной. При уменьшении величины потока возбуждения угловые скорости вращения холостого хода возрастают. Ток короткого замыкания при этом остается неизменным.
. На рис. 2.4 нижняя характеристика соответствует номинальному потоку возбуждения Фн. Если при этом добавочное сопротивление в якорной цепи Rд равно 0 и якорь запитывается номинальным напряжением Uн,то эта характеристика будет естественной. При уменьшении величины потока возбуждения угловые скорости вращения холостого хода возрастают. Ток короткого замыкания при этом остается неизменным.
Момент ДПТ определяется выражением (2.1), поэтому с уменьшением величины потока возбуждения Ф уменьшается и соответствующий пусковой момент Мкз. На рис. 2.5 представлены механические характеристики для различных значений потоков. Практически этот способ используется только для регулирования угловой скорости вращения вверх от основной. Экономически целесообразно регулировать угловую скорость вращения при токе якоря равном номинальному, но при этом номинальные значения моментов будут различными для различных значений величины потока Ф. Точки, соответствующие номинальным моментам двигателя будут лежать на гиперболической кривой, обозначенной пунктирной линией на рис. 2.5.
Рис. 2.4. Характеристики ДПТ с НВ при изменении магнитного потока  .
.
Из этого следует, что целесообразная при таком способе регулирования нагрузка должна характеризоваться нелинейно спадающей механической характеристикой. Диапазон регулирования для двигателей специального исполнения может достигать10:1, но обычно составляет2:1.
Рис. 2.5. Характеристики ДПТ с НВ при изменении магнитного потока .
Согласно принципу обратимости двигатель может работать помимо двигательного и в генераторных режимах. Генераторный режим работы электродвигателя относятся к торможению электродвигателя. Различают следующие генераторные (тормозные) режимы:
• торможение с отдачей энергии в сеть (рекуперативное);
• динамическое торможение;
• торможение противовключением.
Если сторонним устройством разогнать ДПТ с НВ до скорости выше скорости холостого хода, то он начинает работать генератором, включенным параллельно с сетью, отдавая ей электрическую энергию. Ток якоря при этом изменяет свой знак, т.к. Е > U и ДПТ переходит в тормозной режим с моментом Мт = - М.
В этом случае уравнение механической характеристики может быть представлено как
= U/c + MтR/c 2 (2.9)
Нетрудно видеть, что графически зависимость == f(Mт) в данном случае является продолжением механической характеристики двигательного режима и изображается во 2 или 4 квадратах (рис. 2.6). Данный тормозной режим весьма экономичный и широко применяется в промышленности и на транспорте при некоторых способах регулирования скорости, например при регулировании скорости вращения изменением питающего напряжения U.
Рис. 2.6. Механические характеристики ДПТ в режиме рекуперативного торможения (Rд2>Rд1).
Но данный режим работы ДПТ может применяться только при работе электродвигателя на скоростях больших скорости идеального холостого хода w0.
При работе ДПТ с НВ в режиме генератора независимо от сети или в режиме динамического торможения якорную цепь электродвигателя отключают от сети и замыкают её на тормозное сопротивление (рис. 2.7).
Уравнение механической характеристики для этого режима запишется как
=МтR/с2 (2.10)
где Мт - тормозной момент, R - сопротивление якорной цепи. R = Rя + Rp.
Ток якоря можно определить как
I=-E/R, (2.11)
т.е. он изменяет свой знак, чем и обуславливается процесс торможение.
Способ динамического торможения достаточно экономичный, т.к. двигатель работает генератором на постоянную нагрузку, потребляя из сети энергию только на электромагнитное возбуждение. При переводе ДПТ из двигательного режима в режим динамического торможения ограничивают величину максимального тормозного тока в момент переключения.
Режим генератора последовательно с сетью или режим торможения противовключением имеет место тогда, когда обмотки двигателя включены для вращения в одну сторону, но под действием внешнего момента или сил инерции ротор вращается в противоположную сторону.
При превышении активным моментом сопротивления величины пускового момента имеет место тормозной спуск, что приводит к изменению направления вращения якоря двигателя и соответственно знака ЕДС. Из первого уравнения системы (2.1) следует, что в этом случае ток якоря определяется как I=(U+E)/R, т.е. ток якоря превышает значения токов короткого замыкания.
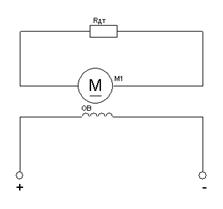
Рис. 2.7. Схема включения ДПТ в режиме динамического торможения.
На рис. 2.8 представлены механические характеристики режима динамического торможения.
Рис. 2.8. Характеристики динамического торможения ДПТ с НВ.
Поэтому для реализации этого режима необходимо ограничивать ток якоря введением добавочного сопротивления Rд. Графически механические и электромеханические характеристики в этом случае являются продолжением соответствующих характеристик в 4 квадрант (рис. 2.9).
Если у ДПТ, работающего в двигательном режиме изменить полярность напряжения на обмотке якоря на противоположную, то знак тока якоря I изменится на противоположный в соответствии с выражением I=-(U+E)/R. Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте. При этом происходит интенсивное торможение и скорость вращения двигателя падает до нуля. Если в этот момент времени обмотку якоря не отключить от сети, то направление вращения изменится на противоположное, т.е. двигатель реверсируется. С энергетической точки зрения данный способ не экономичен, т.к. большое количество энергии выделяется на добавочном сопротивлении, которое необходимо включать в якорную цепь для ограничения бросков тормозного тока. Механические характеристики для этого режима торможения представлены на рис. 2.10.
Рис. 2.9. Характеристики ДЛТ с НВ в режиме тормозного спуска.
Режим тормозного спуска широко применяется в грузоподъемных механизмах для опускания грузов.
Рис. 2.10. Характеристики ДПТ с НВ в режиме торможения противовключением при изменении полярности питающего напряжения (R3>R2>R1).
Переходные процессы. Неустановившиеся или переходные процессы, имеющие место при переходе привода из одного установившегося состояния в другое, совершающемся во времени. При этом
 (2.12)
(2.12)
Можно назвать следующие причины возникновения переходных процессов:
Изменение момента сопротивления Мс;
изменение момента на алу двигателя М, то есть переход привода с одной характеристики на другую, имеющий место при пуске, торможении, реверсе, регулировании скорости, изменении какого-либо параметра привода.
Необходимость в изучении переходных процессов возникает в связи с тем, что производительность ряда ответственных механизмов (например, реверсивного прокатного стана) определяется быстротой протекания переходных процессов; качество выполнения многих технологических операций определяется переходными процессами (движение лифта, врезание резца в деталь и т.п.); механические и электрические перегрузки оборудования в большинстве случаев определяются переходными процессами. Основная задача при изучении переходных процессов сводится к определению зависимостей w(t), M(t) и i(t) для любых конкретных приводов в любых условиях.
Мгновенный наброс и сброс нагрузки, пуск, реверс, торможение – вот круг задач которые приходится решать при исследовании переходных режимов. При этом основным фактором, влияющим на переходной процесс, является механический момент инерции (J). Такие электрические параметры, как индуктивность обмоток якоря, индуктивность обмоток возбуждения и т. п., оказывают ничтожно малое влияние на работу электродвигателя в переходных режимах, поэтому при исследовании переходных процессов ими обычно пренебрегают. Фактор, вызывающий переходный процесс, изменяется скачкообразно (мгновенно) то есть много быстрее, чем скорость.
Все переходные процессы подчиняются, очевидно, механическому уравнению движения
 (2.13)
(2.13)
Искомые зависимости w(t) и M(t) должны быть получены путем решения этого уравнения при заданных начальных условиях. Конкретные особенности привода отразятся в виде зависимостей M(w) и Mс (w) входящих в уравнение.
Рассмотрим поведение привода при следующих условиях:
1. M = const, Mс = const
а) б)
Рис. 2.11. Механические характеристики (а) и временные зависимости (б) при М = const и Mc = const
Пусть привод работал в точке w нач, М нач = М с (рис. 2.11) некоторой характеристики (она нас не интересует) и в момент времени t = 0 был мгновенном переведен на новую характеристику, показанную на рис. 2.11, а жирной линией.
Уравнение движения привода в переходных режимах (2.13) в этом случае представляет собой дифференциальное уравнение с разделяющимися переменными и его решение имеет вид:
 (2.14)
(2.14)
Постоянную интегрирования С найдем из начального условия - при t = 0, w = w нач: w нач = С.
Окончательно будем иметь:
 (2.15)
(2.15)
Это решение действует на интервале w нач < w < w кон, так как по условию при w = w кон функция w(М) терпит излом. На этом интервале М =М1.
Графики переходного процесса приведены на рис. 2.11,б. При этом время переходного процесса t пп:
 (2.16)
(2.16)
Рассмотренный простейший случай имеет очень большое практическое значение, так как к нему может быть сведено в целях оценки времени и характера переходного процесса большое число конкретных задач.
2. Мс = const, M линейно зависит от w, b < 0.
Пусть характеристики двигателя и механизма имеют вид, представленный на рис. 2.12. Уравнение линейной механической характеристики двигателя с отрицательной жесткостью может быть записано как
Рис. 2.12. Механические характеристики и графики переходных процессов w(t) и M(t) при линейной зависимости w(М)
 (2.17)
(2.17)
или
 (2.18)
(2.18)
где  - жесткость механической характеристики; для линейной характеристики
- жесткость механической характеристики; для линейной характеристики  .
.
Подставив полученное уравнение в уравнение движения привода, после простых преобразований получим:
 (2.19)
(2.19)
Выражение в правой части представляет собою w кон. Обозначив коэффициент перед производной через Т м, запишем:
 (2.20)
(2.20)
Теперь подставим в уравнение движения (2.13) вместо  выражение и получим
выражение и получим
 (2.21)
(2.21)
Итак, мы обнаружили, что в рассматриваемом переходном процессе, как для скорости, так и для момента справедливо одинаковое уравнение вида
 , (2.22)
, (2.22)
то есть линейное неоднородное дифференциальное уравнение с постоянной правой частью.
Коэффициент при производной
 (2.23)
(2.23)
называют электромеханической постоянной времени.
Рис. 2.13. К определению электромеханической постоянной времени Тм
Для выяснения смысла этой величины рассмотрим условный привод с характеристикой, показанной на рис. 2.13. Определив время разгона такого привода
 (2.24)
(2.24)
замечаем, что оно выражается так же, как Т м. В связи с этим можно считать, что электромеханическая постоянная времени Т м представляет собою время, за которое привод разогнался бы вхолостую до w = w0 под действием момента короткого замыкания.
Лабораторная работа № 1
«Определение координат и параметров электропривода с двигателем постоянного тока с независимым возбуждением в статическом режиме»
Цель работы: Приобрести практические навыки в выполнении опытов по снятию параметров и построении статических механических и электромеханических характеристик электродвигателя постоянного тока независимого возбуждения для различных режимов работы; получить экспериментальное подтверждение теоретическим сведениям об электромеханических и механических характеристиках электродвигателя.
Лабораторная работа № 2
«Регулирование скорости двигателя постоянного тока с независимым возбуждением»
Цель работы: Изучить основные способы регулирования скорости двигателя постоянного тока с независимым возбуждением.
Лабораторная работа № 3
«Исследование электропривода с двигателем постоянного тока с независимым возбуждением в генераторном режиме»
Цель работы: Изучить режимы торможения двигателя постоянного тока с независимым возбуждением.
Соберите электрическую схему, позволяющую исследовать работу электромашинного агрегата в двигательном режиме. Принципиальная электрическая схема приведена на рис. 2.15. Обмотка возбуждения машины постоянного тока, используемой как двигатель с независимым возбуждением, присоединена через реостат А1 к нерегулируемому выходу “ВОЗБУЖДЕНИЕ” источника G2. К регулируемому выходу “ЯКОРЬ” источника присоединены последовательно соединенные якорная обмотка того же двигателя, а также реостат АЗ и датчик тока блока А4. Вход питания источника G2 присоединен с помощью электрического шнура к одной из двух розеток “220 В~ “ трехфазного источника G1. Обмотка ротора машины переменного тока, используемой как нагрузочный генератор G4 через гнезда “F1”, “FЗ” присоединена к выходу возбудителя G3, вход питания которого присоединен с помощью электрического шнура к одной из двух розеток “220 В~” трехфазного источника G1. Фазы статорной обмотки генератора G4 присоединены к активной нагрузке А2. Указатель частоты вращения Р1 присоединен к выходу преобразователя угловых перемещений G5. В цепь обмотки возбуждения и в якорную цепь двигателя постоянного тока включены амперметры Р2 и РЗ. Соберите схему тепловой защиты машины переменного тока (рис. 2.14). Соедините гнёзда защитного заземления устройств, используемых в эксперименте, с гнездом PE источника питания G1. Переключатели режима работы источника G2 и возбудителя G3 установите в положение “Ручн.”. Регулировочные рукоятки источника G2 и возбудителя G3 поверните против часовой стрелки до упора.
Динамическое торможение
Это один из наиболее распространенных способов торможения. Электромеханические характеристики динамического торможения изображаются во 2 и 4 квадрантах (в зависимости от направления вращения). Опытные данные для построения характеристик необходимо снять для нескольких значений тормозного сопротивления А3.
Опыт проводится в следующем порядке:
Собрать электрическую схему, позволяющую исследовать работу электромашинного агрегата в режиме динамического торможения. Принципиальная электрическая схема приведена на рис. 2.16.
· Регулировочные рукоятки источника G2 и регулировочных сопротивлений А1, А3 и А5 поверните против часовой стрелки до упора.
· Установите переключателями в блоке А2 номинальные напряжения трансформаторов: первичные ~220 В, вторичные ~230 В.
· Включите источник G1. При этом о работе источника, возможно, судить по наличию свечения индикатора.
- Запустите асинхронный электродвигатель М2 включением выключателя А4
- Включите выключатель «СЕТЬ» и нажмите кнопку «ВКЛ» источника G2
- Установите сопротивление динамического торможения А3 в любое положение.
- Вращая регулировочные рукоятки нагрузки А5, изменяйте ток якоря двигателя М1, и заносите показания амперметра P3 и указателя скорости Р1 в таблицу 2.6.
- Опыт повторить при нескольких положениях рукоятки сопротивления А3.
- По данным таблицы построить электромеханическую характеристику исследуемого электродвигателя.
Таблица 2.6.
2.1.4.3 Контрольные вопросы:
- Назовите режимы работы двигателя постоянного тока.
- Перечислите достоинства и недостатки известных Вам способов торможения.
- В каких квадрантах осей координат располагаются характеристики ДПТ с НВ?
- Укажите, в каких режимах работают электрические машины при работе исследуемого электродвигателя в генераторном тормозном режиме?
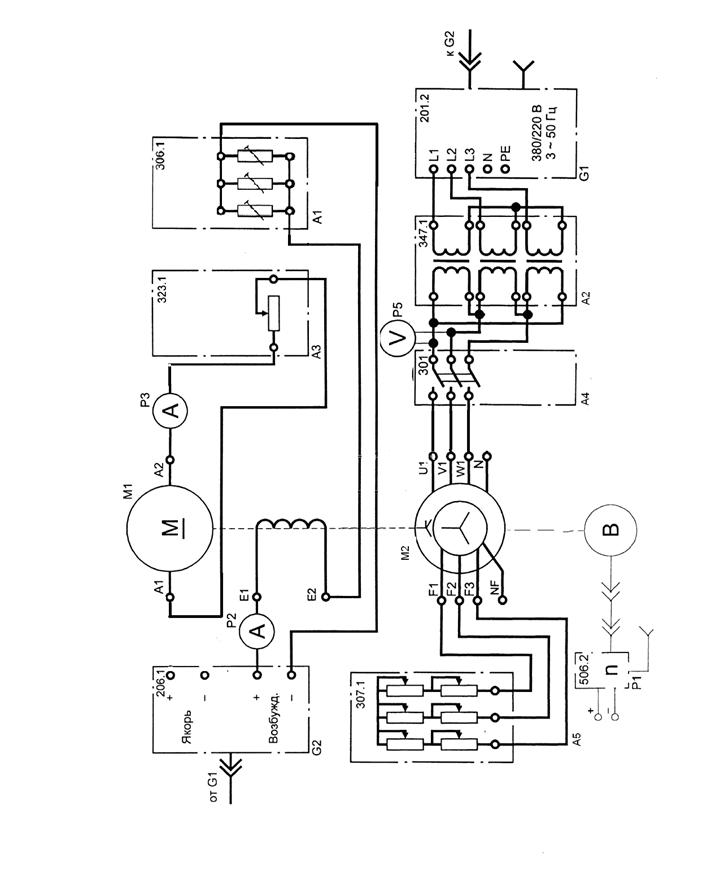
Рис. 2.16. Схема исследования двигателя постоянного тока с независимым возбуждением в режиме динамического торможения.
Лабораторная работа № 4
«Определение координат и параметров электропривода в переходном режиме»
Цель работы: Изучить процессы, протекающие в двигателе постоянного тока с независимым возбуждением в переходных режимах.
Теоретические сведения
Асинхронные двигатели (АД) широко применяются в промышленности благодаря простоте их конструкции, надежности в эксплуатации и сравнительно низкой стоимости.
Схема включения АД в сеть и соответствующая ей однофазная схема замещения приведена на рис. 2.18.
Рис. 2.18. Схема включения и однофазная схема замещения асинхронного электродвигателя с фазным ротором
На приведенной схеме замещения приняты следующие обозначения:
R m, Х m - активное и индуктивное сопротивление контура намагничивания, Ом;
Х 1, Х 2' - индуктивные фазные сопротивления, обусловленные полями рассеяния обмоток статора и ротора, последнее приведено к обмотке статора, Ом;
R 1, R 2S’ - активное сопротивление обмоток статора и суммарное сопротивление ротора, приведенное к обмотке статора, Ом;
U 1 - действующее значение фазного напряжения сети, В;
I m, I 1, I 2’ - соответственно фазный ток намагничивания, статора и приведенный ротора, А;
S - скольжение двигателя, равное
 (2.28)
(2.28)
где w - угловая скорость ротора;w0 - угловая скорость поля статора, рад/с;
 (2.29)
(2.29)
где f 1 - частота напряжения питающей сети, Гц; р - число пар полюсов двигателя.
Рассматриваемая схема замещения двигателя составлена при следующих допущениях:
- параметры двигателя не зависят от режима его работы;
- не учитывается насыщение магнитопровода, добавочные и механические потери, а также влияние высших гармонических составляющих намагничивающих сил обмоток статора и ротора.
Динамическое торможение
Для осуществления динамического торможения обмотка статора отключается от сети переменного тока и подключается к источнику постоянного тока (рис. 2.20). Постоянный ток, протекающий в обмотке статора, создает неподвижный в пространстве магнитный поток. Величина постоянного тока, подводимого к статору асинхронного электродвигателя, обычно ограничивается сопротивлением динамического торможения Rд В обмотках вращающегося по инерции ротора наводится ЭДС, которая вызывает появление
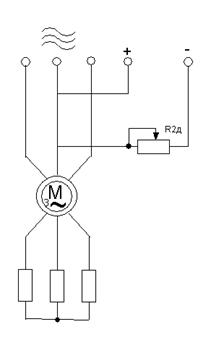
Рис. 2.20. Схема динамического торможения АД
тока в роторной цепи. Взаимодействие тока ротора с неподвижным магнитным потоком статора создает тормозной момент, значение которого определяется выражением
 , (2.37)
, (2.37)
где I ЭКВ - эквивалентный ток обмотки статора, равный для заданной схемы включения обмоток  ;
;
I П - постоянный ток, потребляемый обмоткой статора, I П=(2Q3) I m;
 - текущее значение скольжения при динамическом торможении.
- текущее значение скольжения при динамическом торможении.
Из уравнения (2.37) видно, что момент при динамическом торможении зависит от I ЭКВ, протекающего по обмотке статора, и является функцией относительной скорости вращения ротора S ' = w.
Исследуя полученное значение тормозного момента на экстремумы, найдем, что М К ДТ будет иметь место при
 , (2.38)
, (2.38)
а значение критического момента
 . (2.39)
. (2.39)
С учётом полученных выражений для критического скольжения и критического момента можно вывести уравнение механической характеристики для режима динамического торможения, т. е.
 . (2.40)
. (2.40)
На рис. 2.21 изображены механические характеристики при динамическом торможении для трех различных добавочных сопротивлений в роторе и для двух значений постоянного тока в цепи статора.
Из анализа кривых (рис. 2.21) видно, что при изменении добавочного сопротивления
| Рис. 2.21. Механические характеристики АД при динамическом торможении
| |
в цепи ротора изменяется и среднее значение тормозного момента. Следовательно, имеется оптимальное значение сопротивления, при котором имеет место максимальный тормозной момент при заданном значении постоянного тока и минимальное время торможения.
Режим противовключения
Режим противовключения может быть получен при активном моменте нагрузки (например, при спуске, какого – либо груза), т. е. при М С> М П (рис. 2.22). Для получения соответствующего момента, а, следовательно, и установившейся скорости - wС необходимо в роторную цепь включить добавочное сопротивление R Р2. Установившемуся режиму при этом соответствует точка - wУСТ.1, М С1, т.е. когда момент, развиваемый двигателем, равен моменту статического сопротивления, М = М С.
Рис. 2.22. Торможение противовключением при активном моменте
Торможение противовключением может быть получено путем смены чередования фаз обмотки статора, что приводит к изменению направления вращения магнитного поля. Ротор при этом вращается против направления поля, создавая тормозной момент (рис. 2.22). Когда угловая скорость спадет до нуля, двигатель необходимо отключить от сети, иначе он перейдет в двигательный режим работы, вращаясь в противоположном направлении.
Для ограничения тока, а также для получения эффективного торможения в цепь ротора АД вводят добавочное сопротивление.
Уравнение механической характеристики:
 . (2.41)
. (2.41)
Данный тормозной режим наиболее эффективен, так как при нулевом значении скорости имеет место тормозной момент (рис.2.23).
Рис. 2.23. Торможение АД противовключением.
Рекуперативное торможение
Данный вид торможения имеет место только при скорости выше синхронной, w>w0, и соответствует генераторному торможению с отдачей энергии в сеть. Механические характеристики w= f(M) для данного режима работы приведены на рис. 2.24.
Рис. 2.24. Торможение АД с отдачей энергии в сеть.
Уравнение механической характеристики:
 , (2.42)
, (2.42)
где  ;
;  .
.
Из рисунка 2.24 видно, что ме<