С помощью передаточных функций двухмассойвой системы  можно исследовать динамические свойства механической части электропривода, применяя амплитудно-фазовые характеристики (АФХ). Переход от передаточных функций к АФХ осуществляется простой подстановкой р=jΩ,
можно исследовать динамические свойства механической части электропривода, применяя амплитудно-фазовые характеристики (АФХ). Переход от передаточных функций к АФХ осуществляется простой подстановкой р=jΩ,
где Ω – угловая частота входного воздействия.
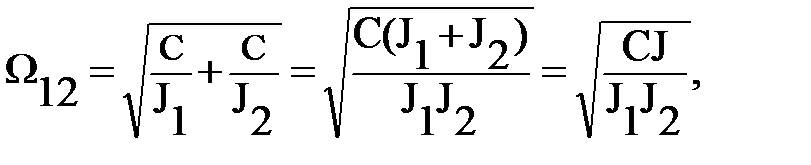
 Для примера рассмотрим динамические свойства двухмассовой системы без диссипативных сил. Полагая
Для примера рассмотрим динамические свойства двухмассовой системы без диссипативных сил. Полагая  найдем АФХ
найдем АФХ
-собственная частота колебаний первой массы при неподвижной второй массе.
Получим:
При анализе можно выделить три области частот (рис. 1.11):
1) 0 < Ω ≤ Ω01 
2) Ω01 ≤ Ω < 

3)  < Ω < ∞;
< Ω < ∞; 
В первой области выделенных частот амплитуда скорости на выходе механической части уменьшается, принимая нулевое значение при Ω=Ω0. В первой области фазовый сдвиг постоянный и равный –π/2. При Ω=Ω0 происходит скачок фазы от –π/2 до π/2 и эта величина остается неизменной во второй области частот, в то время как амплитуда с возрастанием частоты увеличивается, стремясь к бесконечности при Ω→Ω12. При переходе к третьей области частот фаза скачком изменяется от π/2 до -π/2, а амплитуда с возрастанием частоты уменьшается.
Если жесткость механических звеньев очень высокая и теоретически ее можно считать, стремящейся к бесконечности (с→∞), а диссипативными силами можно пренебречь ( ), то получаем собственную частоту Ω12, стремящуюся к бесконечности,
), то получаем собственную частоту Ω12, стремящуюся к бесконечности,
 7.МОДЕЛЬ,структурная схема и уравннеие движения одномассовой системы эп
7.МОДЕЛЬ,структурная схема и уравннеие движения одномассовой системы эп
Таким образом, двухмассовая система преобразуется к одномассовой, которой соответствует структурная схема, показанная на рис. 1.12, операторное уравнение
Jp ω(p)=M(p)–Mc(p)
и дифференциальное уравнение
 (1.72)
(1.72)
которое называется основным уравнением электропривода при постоянном моменте инерции.
 - ур-ие движения при наличии нелин. механизмов (1.73)
- ур-ие движения при наличии нелин. механизмов (1.73)
где J(φ) – приведенный к валу двигателя суммарный момент инерции электропривода, зависящий от угла поворота вала,
Мс(φ) – статический момент на валу двигателя, зависящий от угла поворота.
Полностью очевидно, что при J=const (1.73) преобразуется к (1.72), где возможны частные случаи:
1) Мдин>0, тогда  >0 → разгон,
>0 → разгон,
2) Мдин<0, тогда  <0 → торможение,
<0 → торможение,
3) Мдин=0, тогда  =0, что соответствует установившемуся движению при ωнач>0 и покою при ωнач=0.
=0, что соответствует установившемуся движению при ωнач>0 и покою при ωнач=0.
Заметим, что в установившемся движении Мдин=0 и М=Мс, т.е. электромагнитный момент равен статическому.
8.ДИНАМИЧЕСКИЕ СВОЙСТВА ОДНОМАССОВОЙ СИСТЕМЫ ЭП. Проанализируем динамические свойства одномассовой системы. АФХ будет иметь вид: 
с амплитудно-частотной характеристикой

и фазо-частотной характеристикой (рис. 1.13)
 .
.
Можно видеть, что одномассовая система электропривода является фильтром низких частот, т.е. она пропускает частоты порядка 5-10 Гц и демпфирует более высокие частоты. Это свойство механической части электропривода используется при применении широтно-импульсной модуляции (ШИМ) в современных электроприводах, где механическая часть реагирует в основном на низкочастотную составляющую входного воздействия.
 Теперь сопоставим амплитудно- и фазо-частотные характеристики двух- и одномассовой систем (см. рис. 1.11 и 1.13). Можно видеть, что свойства двухмассовой системы в диапазоне частот 0<Ω<Ω0 и Ω12<Ω<∞ подобны свойствам одномассовой системы. В диапазоне частот W0<W<W12 динамические свойства двухмассовой системы существенно отличаются от динамических свойств одномассовой системы. Знание резонансных частот имеет существенное значение при частотном управлении электроприводом, когда эти резонансные частоты, если они входят в диапазон рабочих частот, необходимо обходить ступенчатым изменением плавного входного задания.
Теперь сопоставим амплитудно- и фазо-частотные характеристики двух- и одномассовой систем (см. рис. 1.11 и 1.13). Можно видеть, что свойства двухмассовой системы в диапазоне частот 0<Ω<Ω0 и Ω12<Ω<∞ подобны свойствам одномассовой системы. В диапазоне частот W0<W<W12 динамические свойства двухмассовой системы существенно отличаются от динамических свойств одномассовой системы. Знание резонансных частот имеет существенное значение при частотном управлении электроприводом, когда эти резонансные частоты, если они входят в диапазон рабочих частот, необходимо обходить ступенчатым изменением плавного входного задания.
Если жесткость механических звеньев очень высокая и теоретически ее можно считать, стремящейся к бесконечности (с→∞), а диссипативными силами можно пренебречь ( )
)
 (1.37)
(1.37)
получаем собственную частоту Ω12, стремящуюся к бесконечности, что дает возможность преобразовать передаточные функции


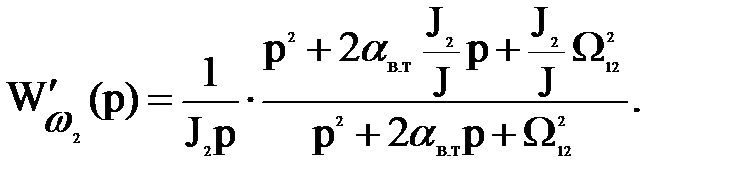 к виду
к виду
 при Мс(р)=0
при Мс(р)=0  при М(р)=0
при М(р)=0
где ω1(р)= ω2(р)= ω(р).
 9.. ПРИВЕДЕНИЕ СИЛ, МОМЕНТОВ СОПРОТИВЛЕНИЯ, МОМЕНТОВ ИНЕРЦИИ И МАСС К ВАЛУ ЭД ДЛЯ ЛИНЕЙНЫХ ПМ
9.. ПРИВЕДЕНИЕ СИЛ, МОМЕНТОВ СОПРОТИВЛЕНИЯ, МОМЕНТОВ ИНЕРЦИИ И МАСС К ВАЛУ ЭД ДЛЯ ЛИНЕЙНЫХ ПМ
С целью упрощения реальную систему электропривода приводят к одной оси, чаще всего к валу электродвигателя со скоростью ω. При этом механические звенья электропривода принимаются абсолютно жесткими.
В результате приведения реальная многомассовая система (рис. 1.14 а) приводится к одномассовой системе (рис. 1.14 б), имеющей суммарный момент инерции J, статический момент Мс, угловую скорость ω и угол поворота вала φ.
При принятом допущении на основании закона сохранения энергии имеем равенство:
Мс ω = ММ ω Н,
из которого находим выражение для статического Мс (приведенного  ) момента
) момента
 (1.79)
(1.79)
Следовательно, статический момент на валу электродвигателя при отсутствии потерь в передаче численно равен моменту сопротивления ММ на валу исполнительного механизма ИМ, деленному на передаточное число j. В этом и состоит сущность приведения моментов сопротивления к валу электродвигателя.
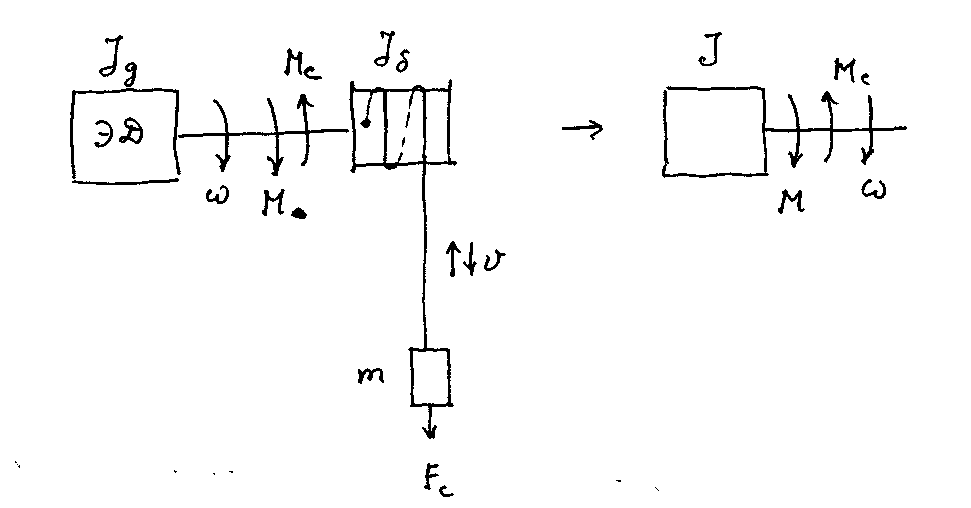 При поступательном движении исполнительного механизма (рис. 1.15 а) и допущении об идеальности передачи с соблюдением закона сохранения энергии имеет равенство
При поступательном движении исполнительного механизма (рис. 1.15 а) и допущении об идеальности передачи с соблюдением закона сохранения энергии имеет равенство
Мс ω = Fс 
где – линейная скорость механизма,
Fc – сила сопротивления в установившемся движении,
Мс – эквивалентный статический момент на валу двигателя одномассовой системы (рис. 1.15 б).
 ,
,
где ρ – радиус приведения поступательного движения к вращательному.
Для линейных передаточных механизмов (j=const, ρ=const) рассмотрим приведения моментов инерции и масс к валу электродвигателя. При вращательном движении исполнительного механизма (см. рис. 1.14 а) и идеальном ПМ кинетическая энергия неприведенной системы должна равняться кинетической энергии приведенной системы (см. рис. 1.14 б), т.е.
 ,
,
откуда находим суммарный момент инерции приведенной системы:

где 
 – приведенный к валу электродвигателя момент инерции механизма.
– приведенный к валу электродвигателя момент инерции механизма.
Для поступательного движения исполнительного механизма (см. рис. 1.15а) записываем равенство кинетических энергий приведенной и неприведенной систем:

из которого получаем

где 
 – приведенный к валу электродвигателя момент инерции поступательно движущейся массы m,
– приведенный к валу электродвигателя момент инерции поступательно движущейся массы m,
 – момент инерции ротора электродвигателя,
– момент инерции ротора электродвигателя,
 – момент инерции барабана, соединенного с ротором ЭД.
– момент инерции барабана, соединенного с ротором ЭД.
Следовательно, приведенный к валу электродвигателя момент инерции поступательно движущейся массы равен произведению этой массы на квадрат радиуса инерции.
10.Приведение сил, моментов сопротивления, моментов инерции и масс к валу ЭД для не линейных ПМ
 на примере кривошипно-шатунного механизма (рис. 1.16). Пренебрегаем потерями в кривошипно-шатунном механизме и массой его элементов.
на примере кривошипно-шатунного механизма (рис. 1.16). Пренебрегаем потерями в кривошипно-шатунном механизме и массой его элементов.
По закону сохранения энергии
FВ  = FA
= FA  ,
,
откуда
FA= FВ  ,
,
Где  =ωК·r,
=ωК·r,

 – линейная скорость точки А,
– линейная скорость точки А,
ωК – угловая скорость кривошипа АО,
r – радиус кривошипа,
ω – угловая скорость ротора электродвигателя,
j – передаточное число ПМ.
Поскольку при ωК=const скорость ползуна В изменяется как по величине, так и по направлению при изменении угла поворота φ кривошипа ОА, то и сила в точке А будет функцией угла, т.е. FA=F(φ).
Момент силы FA относительно точки О
MO(FA)= FA·r= FВ·r·  =ММ
=ММ 
Обозначим mB как массу ползуна и перемещаемого им изделия. Тогда кинетическая энергия движущейся массы mB будет равна
WB=mB 
Приведем эту кинетическую энергию в точку А с фиктивной массой mA, имеющей линейную скорость  :
:
mB  = mA
= mA  mA=mB
mA=mB 
Момент инерции точечной массы mA относительно оси О по определению равен
J0(mA)=JM= mAr2=mBr2 
Приведение этого момента инерции к валу электродвигателя выполняется в соответствии с правилом (1.82):

Для аналитического определения Мс и  необходимо найти отношение
необходимо найти отношение  . С этой целью воспользуемся следствием одной из теорем теоретической механики: при плоском движении проекции скоростей двух точек на прямую, проходящую через эти точки, равны, т.е.
. С этой целью воспользуемся следствием одной из теорем теоретической механики: при плоском движении проекции скоростей двух точек на прямую, проходящую через эти точки, равны, т.е.
 (АВ) =
(АВ) =  (АВ)
(АВ)  cosβ=
cosβ=  sin(φ+β),
sin(φ+β), 
или 
Для треугольника ОАВ (рис. 1.16) по теореме синусов имеем

откуда


Теперь можно записать аналитическое выражение для приведенного к валу электродвигателя момента сопротивления


которые являются функцией угла поворота φ кривошипа ОА.
Расчеты динамики электропривода при переменном моменте инерции весьма сложные. Поэтому в расчетах обычно учитывают фактическую зависимость Мс=F(φ), а момент инерции принимают постоянным, равным среднему значению.
Момент инерции передаточного механизма в большинстве своем неизвестен, поэтому его принимают равным (10-30)% от момента инерции ротора электродвигателя, т.е.
JПМ=(0,1÷0,3)JД
В общем случае суммарный момент инерции электропривода, приведенный к валу электродвигателя, вычисляются по формуле:
J=(1,1÷1,3)JД+ 
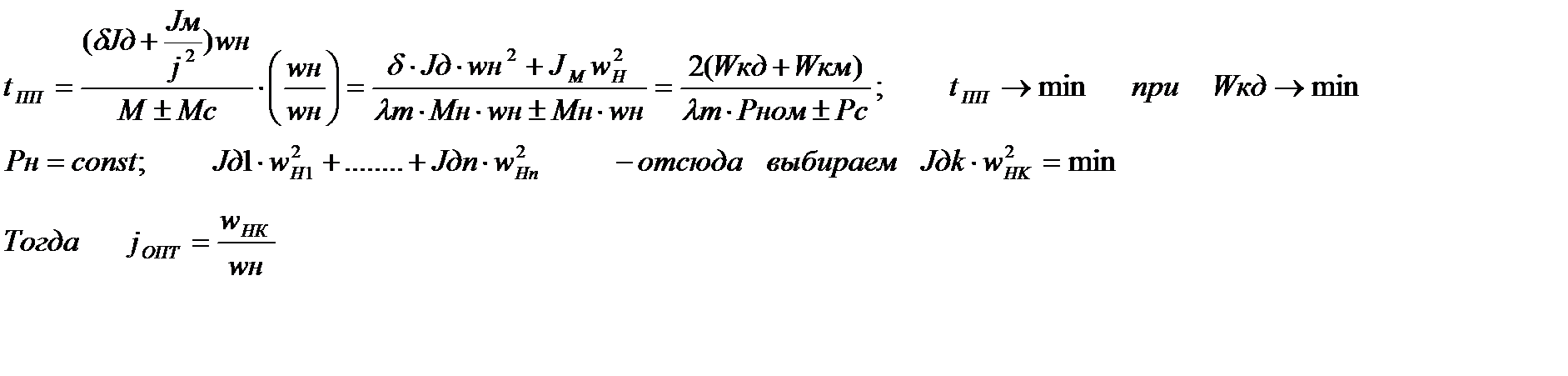
11ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
1) По минимуму времени переходного процесса:
a) первый способ: (ЭДМ=const, Jд=const) (Исполн-й мех-м Mн,wн,Jн)


+ торможение, - разгон
При оптимальном j и отсуствия момента нагрузки на валу, кинетическая энергия механизма = кинетической энергии ЭД вместе с редуктором
b) второй способ ( ЭД P =const) (Исполн-й мех-м Mн,wн,Jн)
М=const; М=Мном  ;
;