ПЕРЕДАТОЧНЫЕ ФУНКЦИИ двухмассовой модели

В структурной схеме рис. 1.7 управляющим воздействием является электромагнитный момент двигателя М(р), возмущающим воздействием – статический момент Мс(р), а регулируемыми координатами (переменными состояния) – скорости первой ω1(р) и второй ω2(р) масс или соответственно углы поворота φ1(р) и φ2(р) этих масс.
На основании этой структурной схемы можно получить передаточные функции по управляющему и возмущающему воздействиям. Получим передаточную функцию по управляющему воздействию для выходной координаты ω2(р):
 при Мс(р) =0
при Мс(р) =0
Передаточная функция замкнутой системы:

Получим в общем виде передаточную функцию по управляющему воздействию для выходной координаты ω1(р):
 при Мс(р) = 0
при Мс(р) = 0

Теперь найдем передаточную функцию по возмущающему воздействию для выходной координаты ω2(р):
 при М (р) =0
при М (р) =0

 ,
,  У всех один знаменатель
У всех один знаменатель

 ; обазначим:
; обазначим:
 -
-

где J=J1+J2 – суммарный момент инерции двухмассовой системы,
Ω12 – собственная частота колебаний 2массовой сист..
αВ.Т – коэффициент затухания механических колебаний.
В результате получаем




В итоге получаем:


ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛОПО КРИТЕРИЮ минимум габарита ЭД
угловое ускорение:
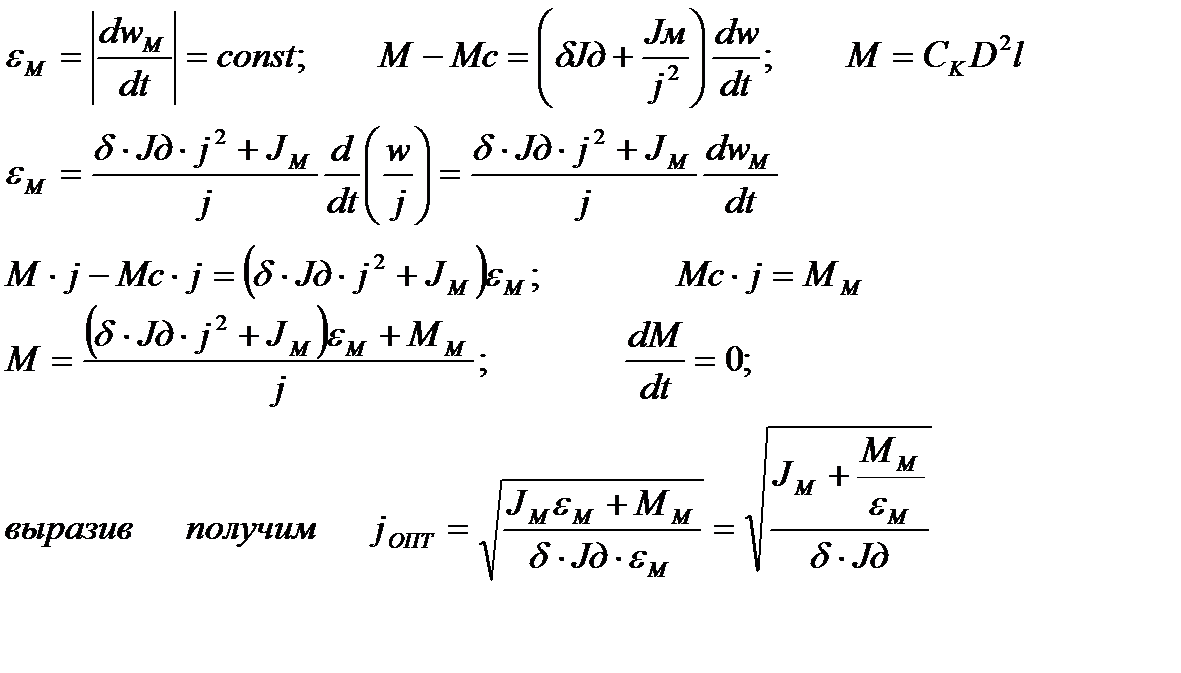
при отсуствии нагрузки на выходном валу 
фиктивный момент инее
рции 
тогда  следовательно
следовательно 
УЧЕТ ПОТЕРЬ В ПЕРЕДАЧЕ.
Потери энергии (мощности) в передаче учитывают двумя способами:
1) приближенным, т.е. с помощью КПД и 2) уточненным, т.е. непосредственным вычислением составляющих потерь. Рассмотрим эти способы.
А. Учет потерь в передачах с помощью КПД.
Механическая часть электропривода (рис.1.17) включает ротор электродвигателя ЭД с угловой скоростью w и моментом М, передаточный механизм ПМ, имеющий КПД  hп и передаточное число j, и исполнительный механизм ИМ, на валу которого приложен момент Мм и скорость вала wм. Для наглядности обозначим статический момент в двигательном режиме
hп и передаточное число j, и исполнительный механизм ИМ, на валу которого приложен момент Мм и скорость вала wм. Для наглядности обозначим статический момент в двигательном режиме  , а в тормозном -
, а в тормозном -  . Для двигательного режима работы, исходя из закона сохранения энергии, можно записать равенство
. Для двигательного режима работы, исходя из закона сохранения энергии, можно записать равенство
 ,
,  , где
, где  ,
,
 - момент механизма, приведенный к валу электродвигателя.
- момент механизма, приведенный к валу электродвигателя.
Для тормозного режима будем иметь такое равенство
 ,
,  ,
,
Но КПД  является переменной величиной, зависящей от постоянных и переменных потерь в передаче. Определим потерю момента в передаче для двигательного режима
является переменной величиной, зависящей от постоянных и переменных потерь в передаче. Определим потерю момента в передаче для двигательного режима
 ,
,
Примем допущение, что в тормозном режиме будет такая же потеря момента. Тогда статический момент в тормозном режиме можно записать в таком виде:

1)  , тогда
, тогда  , что соответствует тормозному режиму, когда двигатель развивает тормозной момент. Применительно к грузоподъемному механизму это будет опускание тяжелого груза, когда момент от действия груза на валу двигателя Мг превышает момент потерь DМ в передаче. Получаем так называемый тормозной спуск;
, что соответствует тормозному режиму, когда двигатель развивает тормозной момент. Применительно к грузоподъемному механизму это будет опускание тяжелого груза, когда момент от действия груза на валу двигателя Мг превышает момент потерь DМ в передаче. Получаем так называемый тормозной спуск;
2)  , тогда
, тогда  , что соответствует не тормозному, значит, двигательному режиму. Для грузоподъемного механизма это эквивалентно опусканию крюка, когда момент от его веса на валу двигателя МК меньше момента потерь DМ в передаче. Имеем так называемый силовой спуск.
, что соответствует не тормозному, значит, двигательному режиму. Для грузоподъемного механизма это эквивалентно опусканию крюка, когда момент от его веса на валу двигателя МК меньше момента потерь DМ в передаче. Имеем так называемый силовой спуск.
Потери момента в передаче приближенно выражаются через две составляющие, одна из которой для данной передачи является постоянной величиной, а вторая – пропорциональна передаваемому моменту:
 ,
,
где  – коэффициент постоянных потерь;
– коэффициент постоянных потерь;
b – коэффициент переменных потерь;
Мс.ном – номинальный статический момент передачи;
Мперед – передаваемый момент, который равен моменту на выходном (по направлению передачи энергии) валу передачи.
Для установившегося двигательного режима  . КПД передачи можно представить отношением мощностей в установившемся режиме:
. КПД передачи можно представить отношением мощностей в установившемся режиме:
 ,
,
где  ,
,  ,
,
P2 – мощность на выходном валу ПМ в установившемся двигательном режиме;
DP – потери мощности в передаче.
 , Обозначим
, Обозначим  ,
,  ,
,
При номинальной нагрузке КЗ=1 и
 ,
,  ,
,
Таким образом, КПД передачи является функцией коэффициента загрузки и номинального КПД, так как коэффициент постоянных потерь  зависит от номинального КПД и для ряда передач приводится в справочниках.
зависит от номинального КПД и для ряда передач приводится в справочниках.
14. Уточненный метод учета потерь в передаче.
Рассмотрим сначала установившийся режим работы. Для двигательного установившегося режима имеем:
 ,
,  ,
,
Для тормозного установившегося режима (см. Рис.1.17):

 ,
,
 ,
,
откуда
 ,
,
Теперь перейдем к переходным режимам. Для двигательного режима в переходном процессе (разгон)
 ,
, 
 , находим
, находим  ,
,
где 
 ,
,
 - коэффициент, учитывающий момент инерции передаточного механизма;
- коэффициент, учитывающий момент инерции передаточного механизма;
 - момент инерции ротора электродвигателя;
- момент инерции ротора электродвигателя;
 - эквивалентный статический момент при разгоне электропривода;
- эквивалентный статический момент при разгоне электропривода;
 - эквивалентный момент инерции при разгоне электропривода.
- эквивалентный момент инерции при разгоне электропривода.
Для тормозного режима в переходном процессе
 ,
,
где М – момент электродвигателя в переходном процессе,
 ,
,  ,
,
находим  , где
, где 
 ,
,
 - эквивалентный статический момент при торможении электропривода;
- эквивалентный статический момент при торможении электропривода;
 - эквивалентный момент инерции при торможении электропривода.
- эквивалентный момент инерции при торможении электропривода.
Заметим, что эквивалентные статические моменты при разгоне и торможении электропривода равны статическим моментам для установившихся двигательного и тормозного режимов. Самое важное состоит в том, что непосредственный учет потерь в передаче привел к тому, что эквивалентный момент инерции при разгоне электропривода стал больше, а при торможении меньше суммарного момента инерции электропривода. Получилось, что инерционность электропривода зависит, при прочих неизменных условиях, от режима работы.
Сложность непосредственного расчета потерь в передаче состоит в том, что необходимо иметь значения коэффициентов  и b.
и b.
ПРЯМЫЕ И ОБРАТНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ ДЛЯ СТАТОРА И РОТОРА ОЭМ
 Преобразование, с помощью которого координаты точки А в новой системы координат
Преобразование, с помощью которого координаты точки А в новой системы координат  выражаются через координаты xА,yА этой точки в старой системе координат, называется прямым координатным преобразованием. Из геометрических построений на Рис. 2.3 следует, что
выражаются через координаты xА,yА этой точки в старой системе координат, называется прямым координатным преобразованием. Из геометрических построений на Рис. 2.3 следует, что


Под вектором  будем понимать вектор
будем понимать вектор  любой переменной ОЭМ, например, вектор напряжения
любой переменной ОЭМ, например, вектор напряжения  , вектор тока
, вектор тока  , вектор потокосцепления
, вектор потокосцепления  . Под координатными осями будем понимать:
. Под координатными осями будем понимать:


где оси u,  вращаются с постоянной угловой скоростью wК относительно неподвижных осей 1a-1b.
вращаются с постоянной угловой скоростью wК относительно неподвижных осей 1a-1b.
Угол поворота осей u,  относительно неподвижных осей 1a-1b равен
относительно неподвижных осей 1a-1b равен
 jК=wК t (2.48)
jК=wК t (2.48)
где t – время.
Теперь, после оговоренных условий, можем записать уравнения координатных преобразований для вектора  любой переменной ОЭМ:
любой переменной ОЭМ:
Прямые преобразования:
а) для переменных статора: б) для переменных ротора:
 (2.49)
(2.49)  (2.50)
(2.50)
Обратные преобразования: б) для переменных ротора:
а) для переменных статора:


(2.51) (2.52)
где  ,
,  – проекции вектора
– проекции вектора  на оси координат 1a-1b,
на оси координат 1a-1b,
 ,
,  – проекции вектора на оси координат 1u-1 ,
– проекции вектора на оси координат 1u-1 ,
 ,
,  – проекции вектора
– проекции вектора  на оси координат 2d-2q,
на оси координат 2d-2q,
 ,
,  – проекции вектора на оси координат 2u-2 .
– проекции вектора на оси координат 2u-2 .
Для упрощения дальнейших записей обозначим:
 ,(2.53);
,(2.53);  ,(2.54)
,(2.54)
 ,(2.55);
,(2.55);  ,(2.56)
,(2.56)
 ,(2.57)
,(2.57)
где  – матрица поворота осей координат статора,
– матрица поворота осей координат статора,
 – обратная матрица поворота осей статора,
– обратная матрица поворота осей статора,
 – матрица поворота осей координат ротора,
– матрица поворота осей координат ротора,
 – обратная матрица поворота осей координат ротора,
– обратная матрица поворота осей координат ротора,
Можно видеть, что
 =
=  =
=  ,
,
 =
=  =
=  ,
,
т. е. обратные матрицы поворота равны транспонированным матрицам. После введения этих обозначений можем записать:
Прямые преобразования: Обратные преобразования:
а) для переменных статора: а) для переменных статора:
 (2.58)
(2.58)  (2.60)
(2.60)
б) для переменных ротора: б) для переменных ротора:  (2.59)
(2.59)  (2.61)
(2.61)
Из (2.96) определяем
 (2.117)
(2.117)
и подставляем в (2.111):
 (2.118)
(2.118)
так как  =0.
=0.
Используя (2.96)  ), выражаем
), выражаем
 (2.119)
(2.119)
и подставляем в (2.111):
 (2.120)
(2.120)
где Kr =  ,(2.121) Kr – коэффициент магнитной связи ротора.
,(2.121) Kr – коэффициент магнитной связи ротора.
Теперь из (2.95)  ) находим
) находим
 (2.122) и подставляем в (2.111):
(2.122) и подставляем в (2.111):

где Ks =  , (2.124) Ks – коэффициент магнитной связи статора.
, (2.124) Ks – коэффициент магнитной связи статора.
Из (2.95) и (2.96) следует, что
 (2.125)
(2.125)
Поскольку
 , (2.153)
, (2.153)
то
 , (2.154)
, (2.154)
где  - индуктивные сопротивления рассеяния статора, ротора (приведенное) и намагничивающего контура.
- индуктивные сопротивления рассеяния статора, ротора (приведенное) и намагничивающего контура.
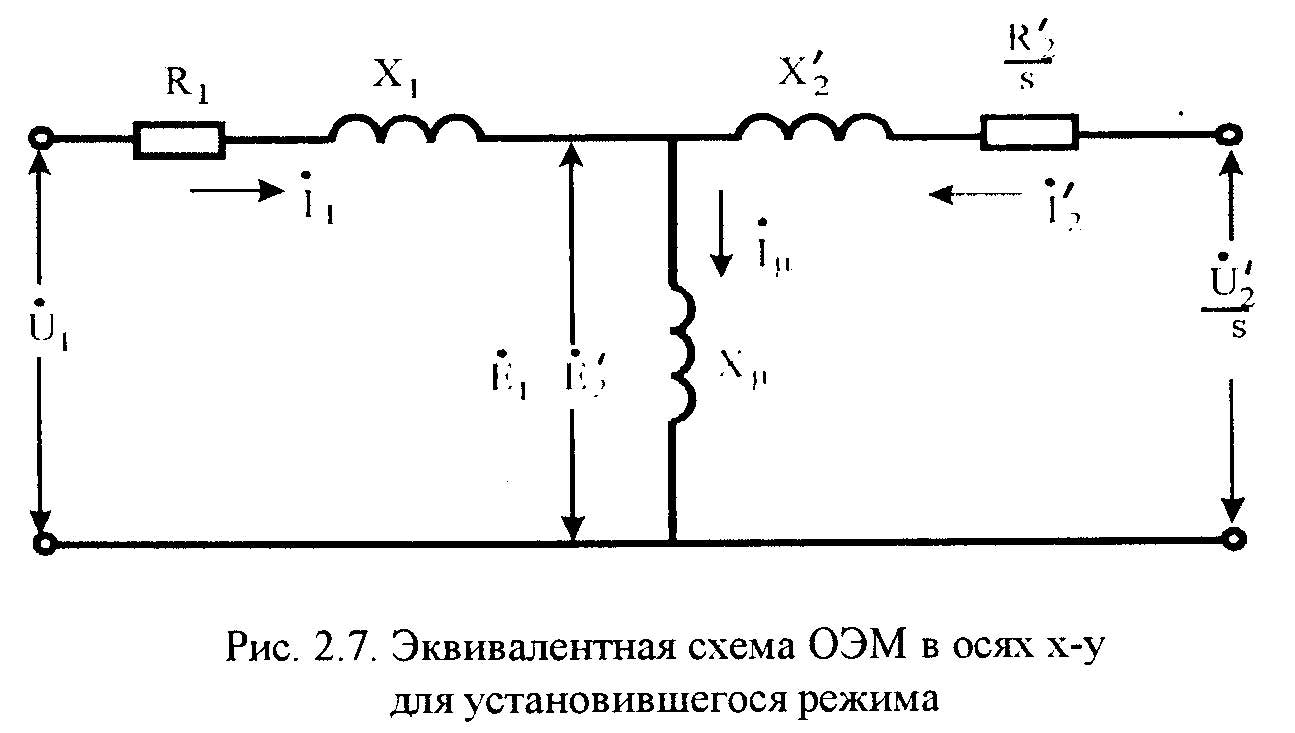
Уравнениям (2.154) соответствует эквивалентная схема ОЭМ, показанная на Рис.2.7, причем
 (2.155)
(2.155)
 - комплекс ЭДС, индуктированной потокосцеплением взаимоиндукции.
- комплекс ЭДС, индуктированной потокосцеплением взаимоиндукции.
ФАЗНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ
В связи с тем, что большинство электрических машин переменного тока выполняется трехфазными, возникает задача преобразования переменных (напряжений, токов, потокосцеплений) реальной трехфазной машины в переменные двухфазной обобщенной машины. Необходимо также производить и обратные преобразования переменных двухфазной машины в переменные трехфазной машины. При этом все преобразования должны быть инвариантными по мощности.
Рассмотрим сначала преобразование переменных  трехфазной электрической машины в переменные
трехфазной электрической машины в переменные  двухфазной обобщенной машины. Будем полагать, что переменные
двухфазной обобщенной машины. Будем полагать, что переменные  и
и  пропорциональны переменным
пропорциональны переменным  и
и  соответственно. Обозначим коэффициент пропорциональности
соответственно. Обозначим коэффициент пропорциональности  .
.
Переменные по осям  и
и  могут иметь любую величину, соответственно и по осям
могут иметь любую величину, соответственно и по осям  .
.
Совместим ось  обмотки статора с осью
обмотки статора с осью  (Рис.2.8). Отметим углы оси по отношению к осям
(Рис.2.8). Отметим углы оси по отношению к осям  :
:  и углы оси
и углы оси  по отношению к осям :
по отношению к осям :  .
.
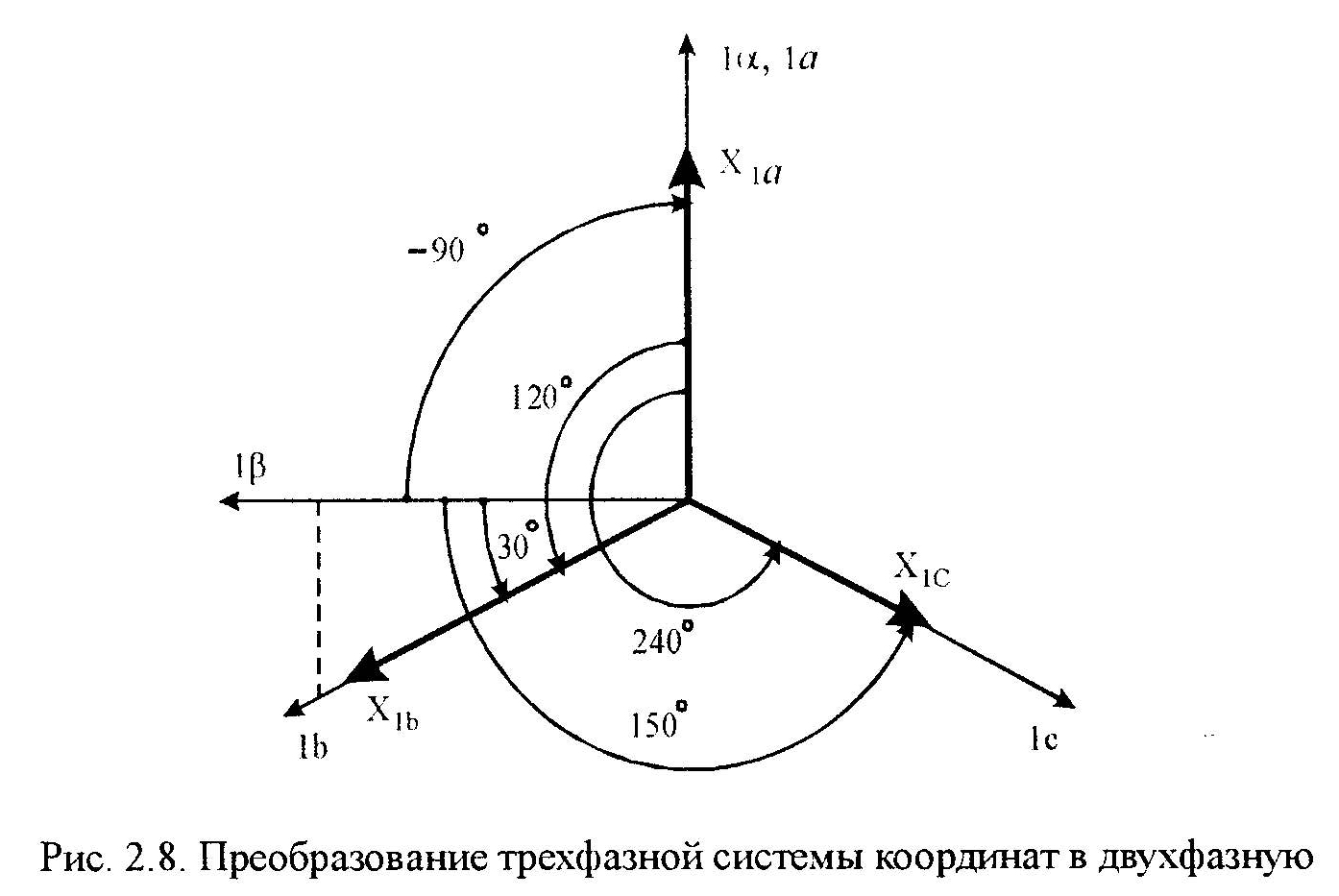
В результате можем составить матрицу поворота трехфазных осей к двухфазным:
 , (2.156)
, (2.156)
Теперь переменные  статора двухфазной системы можно выразить через переменные
статора двухфазной системы можно выразить через переменные  трехфазной системы:
трехфазной системы:
 (2.157)
(2.157)
где  , (2.158)
, (2.158)
Учитываем, что
 , (2.167)
, (2.167)
 , (2.168)
, (2.168)
 , (2.169)
, (2.169)
тогда
 , (2.170)
, (2.170)
Вычислим произведение матриц:

Следовательно
 , (2.171)
, (2.171)
Из условия инвариантности следует принять
 , (2.172) откуда
, (2.172) откуда  , (2.173)
, (2.173)
Но существует и другой подход к фазным преобразованиям, предложенный Ковачем и Рацем […]. Сущность его состоит в том, что в преобразованиях переменных от трехфазной машины к двухфазной и наоборот переменные одной фазы, например фазы  (фазы
(фазы  ) не изменяются. Тогда при переходе от трехфазной машины к двухфазной следует взять
) не изменяются. Тогда при переходе от трехфазной машины к двухфазной следует взять  :
:
 , (2.174)
, (2.174)
Для соблюдения инвариантности мощности необходимо в этом случае в формулах мощности и электромагнитного момента использовать коэффициент  :
:  , (2.175)
, (2.175)  ,(2.176)
,(2.176)
При переходе от двухфазной машины к трехфазной в преобразованиях переменных принимают коэффициент  :
:
 , (2.177)
, (2.177)
Если трехфазная машина имеет переменную  нулевой последовательности (четырехпроводная система), то
нулевой последовательности (четырехпроводная система), то  , (2.178)
, (2.178)
и  , (2.179)
, (2.179)
При наличии нулевой последовательности в токах и напряжениях в четырехпроводной системе будет потребляться мгновенная мощность
 ,
,
Где  - соответственно нулевая последовательность напряжения и тока.
- соответственно нулевая последовательность напряжения и тока.

35. Инвариантность мощности в преобразованиях уравнений ОЭМ от осей  к осям u-v
к осям u-v
 (2.81)
(2.81)
Уравнения (2.81не имеют периодически изменяющихся коэффициентов, хотя остаются нелинейными, так как имеют произведения переменных величин ( и y). Вместе с тем в этих уравнениях появляются составляющие ЭДС, связанные с вращением системы координат u- относительно исходной системы координат 1a-1b. Указанные уравнения соответствуют другой модели ОЭМ, где на взаимно перпендикулярных осях u- находятся неподвижные относительно друг друга системы обмоток, которые вращаются со скоростью
и y). Вместе с тем в этих уравнениях появляются составляющие ЭДС, связанные с вращением системы координат u- относительно исходной системы координат 1a-1b. Указанные уравнения соответствуют другой модели ОЭМ, где на взаимно перпендикулярных осях u- находятся неподвижные относительно друг друга системы обмоток, которые вращаются со скоростью  относительно осей 1a-1b. Возникающие при таком вращении дополнительные ЭДС и обеспечивают инвариантность мощности при преобразованиях переменных. Покажем, что при рассмотренном координатном преобразовании соблюдается инвариантность мощности. В целях упрощения примем u2d=u2q=0, тогда полная мощность S:
относительно осей 1a-1b. Возникающие при таком вращении дополнительные ЭДС и обеспечивают инвариантность мощности при преобразованиях переменных. Покажем, что при рассмотренном координатном преобразовании соблюдается инвариантность мощности. В целях упрощения примем u2d=u2q=0, тогда полная мощность S:
 (2.83)
(2.83)
Представим векторы напряжения и тока через обратные преобразования (2.63), (2.64) и учтем, что
 , (2.84)
, (2.84)
тогда 
так как  (2.86)
(2.86)
Равенство  (2.87)
(2.87)
подтверждает инвариантность мощности при координатном преобразовании.
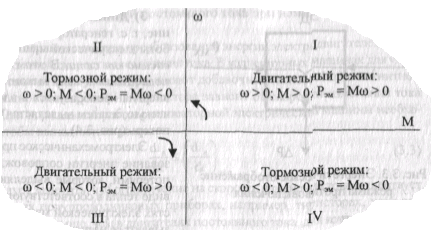
36 РЕЖИМЫ РАБОТЫ ЭЛЕКТРОДВИГАТЕЛЕЙ и ограничения на электромеханические преобразования энергии
Электрическая машина обратима, поэтому она может работать в двух режимах, двигательном итормозном. В двигательном режиме электромагнитная мощность принимается положительной (Рэм = Мw >0), а в тормозном режиме -отрицательной (Рэм = Mw < 0).
 Каждый тормозной режим является генераторным, так как энергия поступает в электрическую машину с вала, преобразуется в электрическую, отдается в сеть или рассеивается в сопротивлениях, связанных с якорем. Различают три тормозных режима электрической машины:
Каждый тормозной режим является генераторным, так как энергия поступает в электрическую машину с вала, преобразуется в электрическую, отдается в сеть или рассеивается в сопротивлениях, связанных с якорем. Различают три тормозных режима электрической машины:
1) Рекуперативное торможение, т. е. генераторный режим работы электрической машины параллельно с сетью. В этом режиме к двигателю поступает механическая энергия, которая за вычетом потерь возвращается в сеть в виде электрической энергии (рис. 3.2).

2) Торможение противовключением, т. е. генераторный режим работы электрической машины последовательно с сетью. В режиме противовключения к электрической машине с одной стороны подводится механическая, а с другой - электрическая энергия, и суммарная энергия превращается в потери (рис. 3.3).
3) Динамическое торможение, т. е. генераторный режим работы электрической машины независимо от сети. В этом режиме подводимая к валу механическая энергия преобразуется в электрическую, а затем выделяется в виде потерь (рис. 3.4).
Электромеханическое преобразование энергии сопровождается потерями, которые выделяются в виде тепла в соответствующих частях электрической машины и вызывают ее нагревание. Нагревание электрической машины ограничивается допустимой температурой. Поэтому первым ограничением преобразования энергии в электродвигателе будет ограничение по нагреву: мощность, момент и ток двигателя не должны превышать значений, допустимых по нагреву. Допустимые по условиям нагрева данные электродвигателя называются ) номинальными.
Второе ограничение, связанное с преобразованием энергии электродвигателем, состоит в кратковременно допустимом токе и моменте: Iдоп, Мдоп, которые электродвигатель может безопасно выдерживать заданное время. Отношение этих величин к номинальным называют перегрузочной способностью двигателя.


Для коллекторных машин перегрузочная способность ограничивается в первую очередь условиями коммутации. Реактивная ЭДС в коммутирующей секции обмотки якоря, которая определяет искрение на коллекторе, пропорциональна произведению скорости со и тока якоря I. В связи с этим, исходя из допустимой степени искрения на коллекторе, в диапазоне скоростей w > wном следует уменьшать допустимое значение тока:




Для обычных двигателей постоянного тока при номинальной скорости

Третье ограничение при преобразовании энергии электродвигателем связа-ю с допустимой скоростью изменения тока. В коллекторных машинах для улучшения условий коммутации применяют добавочные полюса. Из-за магнитной инерционности искрение на коллекторе зависит от скорости изменения тока якоря. Для нормальной работы коллекторной электрической машины необходимо, чтобы выполнялось условие:

Следует заметить, что ограничение на скорость изменения тока существует и в силовых полупроводниковых приборах, например, тиристорах, хотя она там на порядки выше, чем в двигателях постоянного тока, для которых обычно

В бесколлекторных машинах переменного тока (асинхронных, синхронных) перегрузочная способность выше, чем в коллекторных машинах, и ограничивается наибольшим (критическим) моментом, который может развивать машина при данном напряжении и токе возбуждения. •
Максимальное значение скорости двигателя ограничивается механической прочностью подшипниковых узлов и креплений ротора, а для коллекторных машин - главным образом, допустимым значением реактивной ЭДС.
Теперь можно на плоскости переменных о)-М выделить облает допустимых значений для длительной и кратковременной работы электродвигателя (рис. 3.5),
37. МОДЕЛЬ ДПТ НВ В ОСЯХ  И ЕЁ УРАВНЕНИЯ
И ЕЁ УРАВНЕНИЯ
Модель обобщенной электрической машины в осях 1α-1β, 2d-2q включает в себя все частные модели электрических машин. Модель ДПТ НВ получается из этой модели с помощью следующих изменений:
1) Обмотка статора по оси 1β включается на постоянное напряжение, а обмотка статора по оси 1α не используется;
2) Обмотки фаз 2d, 2q питаются переменными токами i2d, i2q от преобразователя частоты ПЧ, осуществляющего коммутацию тока в функции электрического угла φЭЛ поворота ротора с угловой частотой ωЭЛ, где сигнал φЭЛ поступает от датчика положения ротора ДПР (рис.3.6).
Если ПЧ – вентильный преобразователь частоты коммутируемый с помощью ДПР, то эта модель соответствует модели вентильного (электроннокоммутируемого) двигателя. Если же ПЧ – механический коммутатор, т.е. коллектор со щетками, то рис. 3.1 представляет собой модель коллекторного двигателя постоянного тока.
Для двухфазной модели обобщенной электрической машины в осях 1α-1β, 2d-2q была получена формула (2.25) мгновенного значения электромагнитного момента 

В представленной на рис. 3.6 модели ДПТ НВ U1α=0, i1α=0, поэтому
 (3.5)
(3.5)
Для непрерывного преобразования энергии электродвигателем необходимо, чтобы электромагнитный момент (3.5) не зависел от положения ротора, т.е. от φЭЛ. Это возможно, если
 (3.6)
(3.6)
тогда
 (3.7)
(3.7)
Преобразуем токи ротора i2d, i2q к неподвижным осям α-β, используя общие формулы (2.50) прямого преобразования переменных ротора:
 (3.8)
(3.8)
где ΔφК=φК-φЭЛ=(ωК-ωЭЛ)t
Для неподвижных осей α-β имеем ωК=0 и
ΔφК=-ωЭЛt=-φЭЛ (3.9)
тогда с учетом (3.6) и (3.9) имеем
 (3.10)
(3.10)
т.е. i2α=iЯ и i2q=0.
Следовательно, две обмотки ротора, находящиеся на осях 2d-2q, при преобразовании к осям статора дают одну обмотку, оп которой протекает постоянный ток iя.
38. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДПТ НВ И СТРУКТУРНАЯ СХЕМА ДПТ НВ В ОСЯХ 


Уравнение обобщенной электрической машины в осях α-β применительно к условиям ДПТ НВ:
 (3.12)
(3.12)
Имеют вид
 (3.13)
(3.13)
Учитывая, что
 (3.14) пол-ем
(3.14) пол-ем  (3.15)
(3.15)
Изменяя обозначения переменных обобщенной электрической машины в осях α-β на привычное обозначение переменных ДПТ НВ:
 (3.16) то
(3.16) то  (3.17)
(3.17)
Обозначим:
 (3.18)
(3.18)
 (3.19)
(3.19)
где е – ЭДС вращения ДПТ НВ,
Ф – магнитный поток взаимоиндукции,
k – конструктивный коэффициент определяемый как
 (3.20)
(3.20)
N – число активных проводников обмотки якоря,
а – число пар параллельных ветвей обмотки.
На основании (3.19) имеем
 (3.21)
(3.21)
где
 (3.22)
(3.22)
LФ – эквивалентная индуктивность, определяющая связь между магнитным потоком взаимоиндукции и током возбуждения электрической машины.Величину LФ можно определить из кривой намагничивания электрической машины (рис. 3.9).

Теперь систему уравнений (3.17) можно записать в виде:
 (3.23)
(3.23)
Выразим
 (3.24)
(3.24)
и подставим в первое уравнение (3.23):
 (3.25)
(3.25)
Обозначим
 (3.26)
(3.26)  (3.27)
(3.27)
тогда (3.23) можно представить в таком виде
 (3.28)
(3.28)
где ТВ – электромагнитная постоянная времени цепи возбуждения ДПТ НВ,
ТЯ – электромагнитная постоянная времени якорной цепи.
Систему уравнений (3.28) запишем в операторной форме
 (3.29)
(3.29)
УЧЕТ ПОТЕРЬ В ПЕРЕДАЧЕ 18
14. Уточненный метод учета потерь в передаче. 20
ПРЯМЫЕ И ОБРАТНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ ДЛЯ СТАТОРА И РОТОРА ОЭМ 42
ПРЕОБРАЗОВАНИЕ ПЕРЕМЕННЫХ ЭЛЕКТРИЧЕСКОГО РАВНОВЕСИЯ ДЛЯ ОБМОТОК СТАТОРА И РОТОРА ОЭМ
ФАЗНЫЕ ПРЕОБРАЗОВАНИЯ ПЕРЕМЕННЫХ 56
35. Инвариантность мощности в преобразованиях уравнений ОЭМ от осей к осям u-v 62
ТОРМОЗНЫЕ РЕЖИМЫ ДПТ СВ
51.ЛИНЕАРИЗОВАННАЯ СТРУКТУРНАЯ СХЕМА АД ПРИ R1=0
КЛАССФИФИКАЦИЯ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ
Номинальная мощность электродвигателя Рном определяется выражением
Рном=Мномwном, (1.1)
где Мном , wном – номинальные вращающий момент и угловая скорость ротора.
В свою очередь
Мном=СкD  l (1.2)
l (1.2)
где
Ск – коэффициент, зависящий от конструктивных особенностей электрической машины,
D – диаметр якоря,
L – длинна активной части якоря.
Отсюда следует, что для уменьшения габаритов электродвигателя (D l) при заданной номинальной мощности Рном необходимо увеличивать угловую скорость wном, особенно для маломощных двигателей (wном=100 – 600 рад/с). В тоже время для рабочих машин по технологическим условиям требуется значительно меньшая скорость, примерно, в 10 – 100 раз меньшая. Согласование механических параметров электродвигателя (скорости и момента) с механическими параметрами рабочей машины осуществляется с помощью передаточного механизма (ПМ). При этом ПМ могут изменять не только количественные параметры механической энергии, но и характер движения, преобразуя вращательное движение в поступательное.
 Редукторы представляют собой зубчатые передачи, заключенные в единый корпус (Рис.1.1а). По числу зубчатых пар они разделяются на одно-, двух-, трех-, n-ступенчатые. По виду зубьев: на прямозубые, косозубые, червячные. По исполнению: на цилиндрические и конические. По принципу действия: на обычные и планетарные.
Редукторы представляют собой зубчатые передачи, заключенные в единый корпус (Рис.1.1а). По числу зубчатых пар они разделяются на одно-, двух-, трех-, n-ступенчатые. По виду зубьев: на прямозубые, косозубые, червячные. По исполнению: на цилиндрические и конические. По принципу действия: на обычные и планетарные.
Редуктор характеризуется передаточным числом

Совместная компоновка электродвигателя и редуктора называется мотор-редуктором.
Передаточные числа редукторов находятся в пределах  =1,6 – 12500. редукторы изготовляются на мощности от 0,12 до 560 кВт и выходные моменты до 1200кНм.
=1,6 – 12500. редукторы изготовляются на мощности от 0,12 до 560 кВт и выходные моменты до 1200кНм.
Ременные(цепные)передачи (Рис.1.1б) характеризуются передаточным числом

где D1, Z1 – диаметр (число зубьев) входного шкива (звездочки),
D2, Z2 – диаметр (число зубьев) выходного шкива (звездочки).
Передачизубчатоеколесо-рейка, барабан-трос преобразуют вращательное движение в поступательное и характеризуются радиусом приведения

Винтоваяичервячно-реечнаяпередачи преобразуют вращательное движение винта (червяка) в поступательное перемещение гайки (рейки). Радиус приведения поступательного движения к вращательному:
а) для винтовой передачи
 ,
,
б) для червячно-реечной передачи

где l,  – линейные перемещения и скорость,
– линейные перемещения и скорость,
 ,
, 
|
|
|






