Выполняемая, механизмом смыкания раздувных агрегатов функция – это смыкание-размыкание полуформы; запирание сомкнутых полуформ усилием, большим, чем распорное усилие от давления раздувающего воздуха. Кроме этого обе плиты с закрепленными на них полуформами должны быть подвижны и смыкаться одновременно, чтобы плоскость смыкания совпадала с осью выдавливаемой заготовки. Симметричность смыкания плит относительно оси заготовки обеспечивается механизмами синхронизации. Каждая плита имеет свой привод.
Машины малых и средних типоразмеров имеют механизмы смыкания с непосредственным приводом от пневмо- или гидроцилиндров. У больших машин эти механизмы чаще всего коленчато-рычажного типа и подобны по конструкции таковым у литьевых машин.
Кинематический, силовой и прочностной расчеты этих механизмов также подобны аналогичным расчетам для литьевых машин. Исходной при расчетах является величина требуемого усилия запирания форм F, которую можно определить по формуле F=ps (где, р – давление раздувающего воздуха, s – площадь проекции формуемого изделия на плоскость, перпендикулярную направлению смыкания плит).
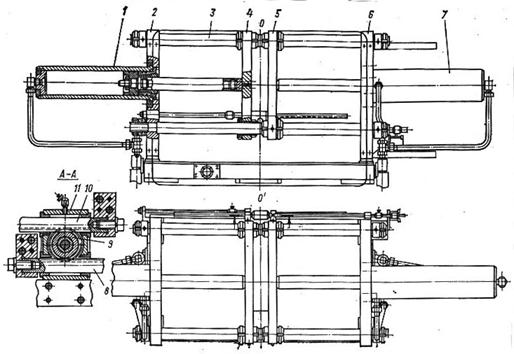
Рис. 91
На рис. 91 механизм смыкания состоит из двух неподвижных плит 2 и 6 и двух подвижных плит 4 и 5, приводимых в движение от двух гидроцилиндров 1 и 7. Неподвижные плиты стянуты расположенными по их диагоналям колоннами 3. Эти колонны служат направляющими для подвижных плит.
Симметричное перемещение плит относительно оси заготовки и раздувающего ниппеля ОО’ обеспечивается синхронизатором. Корпус 11 синхронизатора крепится к основанию механизма или к середине нижней колонны. В корпусе укреплена ось, на которую подвижно надета шестерня 9. В зацеплении с шестерней находятся зубчатые рейки 8 и 10, каждая из которых укреплена на своей подвижной плите механизма смыкания. Благодаря такому кинетическому сочленению подвижных плит перемещение какой-либо из них вызывает точно такое же встречно направленное перемещение другой.
Пример двухпозиционного механизма смыкания с приводом от одного пневмоцилиндра 8 показан на рис. 92. Две неподвижные плиты 14 стянуты двумя диагонально расположенными колоннами 7. Эти колонны случат также направляющими для трех основных подвижных плит 3, 6, 11 и одной вспомогательной подвижной плиты 15. Механизм расположен под двухручьевой головкой с попеременно работающими ручьями 4 и 5.
На плитах 3 и 11 укреплена одна пара полуформ – А и А’, с другой стороны плиты 11 и на плите 6 укреплен другой комплект полуформ – Б и Б’. В то время как полуформы А и А’ открыты, полуформы Б и Б’ закрыты и наоборот.

Рис. 92
Механизм работает следующим образом. При смыкании полуформ Б и Б’ шток 9 пневмоцилиндра 8 перемещает плиту 6 влево. Плита 6 связана двумя штангами 10 с плитой 3. Так что она также движется влево с той же скоростью, размыкая полуформы А и А’. Чтобы смыкание Б и Б’ и размыкание А и А’ было симметричным относительно осей О и О’, необходимо, чтобы средняя подвижная плита 11 перемещалась вправо с той же скоростью. Это обеспечивается спаренным шатунным механизмом, ось которого 13 укреплена на неподвижной плите 14. Плита 3, перемещаясь влево, посредством серьги 2 поворачивает шатун 1 против часовой стрелки, и нижний конец шатуна. Уходит вправо. Тянет за собой вспомогательную плиту 15, которая соединена парой штанг 12 со средней плитой 11 и поэтому толкает ее вправо. Плита 11, перемещаясь, одновременно осуществляет перепуск расплава из правого ручья головки в левый ручей.

Рис. 93
Механизм смыкания машин для производства малых изделий, часто выполняют с «книжным» типом смыкания полуформ (рис. 93). Преимущество их в том, что пространство между разомкнутыми полуформами максимально открыто для обслуживания (ввода заготовки, сьема изделия): направляющие колонны этому не мешают. Как это имеет место в описанных выше конструкциях.
Траверса 6 укреплена на станине или вращающемся столе агрегата винтом 5. Вокруг осей 2 траверсы могут вращаться навстречу друг другу кронштейны 1, на которых смонтированы полуформы. Кронштейны приводятся во вращение складывающимися рычагами 3, а те в свою очередь приводятся гидро и пневмоцилиндром (на рисунке не показан), перемещающим шарнир 4 в направлении, указанном стрелками.
Механизм раздува заготовки (рис. 94) приемного устройства работает следующим образом.

Рис. 94
С помощью маховика 1 и винта 2 может перемещаться вдоль линии разъема форм, т.е. перпендикулярно оси приемного устройства, что позволяет получать различные по конфигурации изделия. Корпус 5 ниппеля соединен с плитой 11, которая перемещается по направляющим. В корпусе смонтировано зубчатое колесо 6, находящееся в зацеплении с рейкой 3. Рейка связана с кареткой 7, которая движется по направляющим 8. На каретке установлен держатель 9 раздувного ниппеля. В момент раздувания ниппель находится в верхнем положении. Как только изделие охладилось, форма размыкается, ниппель опускается, а изделие снимается. Приводом для перемещения ниппеля служит золотник-рейка 14, поворачивающая зубчатое колесо 13 и соединенный с ним вал 4 и колесо 6. вал 4 и колесо 6. На рейке 15 установлен кулак 12, который воздействует на конечные включатели, подающие команду на перемещение соответствующих механизмов. В случае использования неподвижного ниппеля муфта 10 перемещается вправо, разобщая тем самым приводной вал 4.






