Введение
Курсовое проектирование является важным этапом изучение курса “Теория электропривода” и предлагает законченным освоение курсов теоретических основ электротехники, теории автоматического управления и электрических машин.
Целью курсовой работы является приобретение навыков в разработке, применение известных методов расчета и проектирование приводов производственных механизмов, которые бы обеспечивали высокую производительность, имели бы. Необходимо, прежде всего, уяснить технологические особенности работы механизма: величину и характер изменения статического момента, плавность и пределы регулирования скорости, частоту и условия пусков и торможений, требования к статическим и динамическим режимам и т.д., что позволит выбрать целесообразный тип и рациональную мощность привода, обеспечивающего высокую производительность производственного механизма, его надежность и долговечность, минимальные массогабаритные показатели и энергозатраты, а также возможность комплексной автоматизации данного производственного процесса.
В курсовой работе предусматривается разработка электропривода по системе генератор-двигатель с асинхронным приводом двигателем с фазным ротором для одного из общепромышленных механизмов циклического действия. Выбор такой системы электропривода обусловлен учебными задачами - закрепление знаний по курсу “Теория электропривода”.
Задание на курсовую работу
Задачей курсовой работы является разработка разомкнутой системы реверсивного электропривода производственного механизма, выбор и расчет его силовых элементов, расчет и построение нагрузочных диаграмм и тахограммы, статических и динамических характеристик, кривых переходного процессов и проверка двигателя по нагреву.
На рис. 1.1 приведена кинематическая схема механизма наклонного подъемника, электропривод которого надлежит разработать.
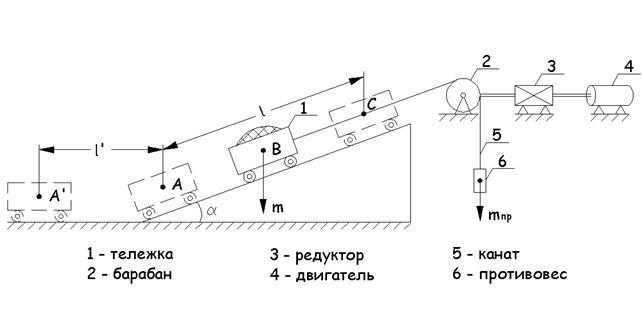
Рисунок 1.1 – Кинематическая схема механизма наклонного подъемника
Наклонный подъемник состоит из тележки 1, перемещающейся по рельсовому пути, уложенному под углом α к горизонтали. Тележка совершает челночное движение по перемещению груза из нижнего положения (из точки А или А’) в верхнее положение (в точку С) на расстояние ℓ или ℓ’. После разгрузки в верхнем положении тележка порожней возвращается в нижнее положении, где проводится ее загрузка, а за тем цикл повторяется.
Перемещение тележки осуществляется при помощи троса 5 (система кинематических связей, для упрощения ее изображения, приведена на рисунке 1.1 схематично), наматываемого на барабан 2, который сочленяется через редуктор 3 с двигателем 4. Для улучшения режима работы двигателя, к барабану, через трос 5, присоединяется противовес 6. При остановках в нижнем и верхнем положениях тележка удерживается с помощью электромагнитных тормозов. В общем случае предлагается, что при пуске двигателя его растормаживание происходит мгновенно в момент времени, когда электромагнитный момент двигателя Мg сравняется со статическим моментом Мс.
Цикл работы подъемника состоит из следующих этапов. Из нижнего положения, точка А (А'), загруженная тележка, разогнавшись, осуществляет движение с постоянной рабочей скоростью Vраб. После прохождения тележкой расстояния ℓ’’ (ℓ’ + ℓ’') подается сигнал на снижение напряжения питания обмотки возбуждения генератора и двигатель переключается работать на новую статическую характеристику с меньшей угловой скоростью, а тележка, притормозив под действием статических сил сопротивления, переходит на движение с ползучей скоростью Vполз. Затем отключается возбуждение генератора и тележка, под действием сил сопротивления, останавливается в точке С с последующим наложением тормозов (сигнал на срабатывание тормозов может поступать от датчиков перемещения тележки). В аварийном случае, когда тележка не останавливается в предельном положении, сигнал от концевых выключателей вызывает накладывание тормозов еще до ее остановки. После остановки тележка разгружается и затем, разогнавшись до рабочей скорости Vраб, двигается вниз до отметки, отстоящей от точки С на расстояние ℓ’’, после чего снижается напряжение питания обмотки возбуждения генератора и двигатель переключается работать на новую статическую характеристику с меньшей угловой скоростью, а тележка, притормозив под действием статических сил сопротивления, переходит на движение с ползучей скоростью. Остановка тележки в точке А (A') происходит аналогично остановке в точке С. Затем тележка загружается и на этом очередной цикл заканчивается.
Ходовая часть тележки, к.п.д. редуктора и барабана характеризуется следующими величинами:
1) диаметр колеса тележки 
2) диаметр цапфы колеса 
3) коэффициент трения качения колеса по рельсу 
4) коэффициент трения скольжения в подшипниках колес  ;
;
5) коэффициент, учитывающий сопротивление движению колеса от трения его реборды о рельс, от трения на торцевых частях ступицы и т.д.  ;
;
6) к.п.д. редуктора  ;
;
7) к.п.д. барабана  .
.
Массогабаритные и скоростные показатели транспортного средства:
1) масса тележки mт = 60, кг;
2) масса груза mг = 240, кг;
3) масса противовеса mпр = 115, кг;
4) рабочая скорость тележки Vраб = 0,6, м/с;
5) ползучая скорость тележки Vполз = 0,05, м/с;
6) допустимое ускорение тележки адоп = 0,66, м/с2;
7) момент инерции барабана Jб = 4, кгм2;
8) диаметр барабана Dб = 0,36, м;
9) угол наклона пути α = 40, град.
Показатели работы транспортного средства и транспортного пути:
1) время загрузки tз = 10, с;
2) время разгрузки tр = 8, с;
3) длина пути движения между точками А и С ℓ = 10, м;
4) длина пути движения между точками А и A' ℓ' = 1,5, м;
5) длина пути разгона и движения груженой тележки с Vраб ℓ'' = 9, м;
6) длина пути разгона и движения порожней тележки с Vраб ℓ''' = 9,2, м.
В качестве электропривода используется система генератор-двигатель постоянного тока независимого возбуждения (Г-Д) с приводным асинхронным двигателем с фазным ротором.
При выполнении курсовой работы необходимо:
1. привести кинематическую схему механизма наклонного подъемника и в соответствии с вариантом записать его показатели;
2. определить величины моментов сопротивления относительно вала барабана для обоих направлений движений тележки;
3. определить предварительную мощность электрических машин системы с учетом ПВ% и рациональное передаточное число редуктора;
4. рассчитать и построить тахограмму  и нагрузочные диаграммы
и нагрузочные диаграммы  ,
,  электропривода с учетом динамических нагрузок и при условии постоянства ускорений в периоды переходных процессов;
электропривода с учетом динамических нагрузок и при условии постоянства ускорений в периоды переходных процессов;
5. проверить предварительно выбранный двигатель по мощности, используя методы эквивалентных (средних) величин, и по перегрузочной способности. Представить принципиальную схему электропривода;
6. рассчитать и построить статические механические (электромеханические) характеристики для всех режимов работы привода: для груженой и порожней тележки при работе с  и
и  ;
;
7. рассчитать и построить графики переходных процессов электропривода:
 , и для всех участков, а также динамическую механическую
, и для всех участков, а также динамическую механическую
характеристику  ;
;
8. проверить двигатель по нагреву с учетом реальных переходных процессов;
9. рассчитать и выбрать пусковые резисторы приводного асинхронного двигателя.
Определение сил и моментов.
Поскольку передаточное число редуктора неизвестно и его еще предстоит определить с учетом действующих сил, то целесообразно рассчитать мощность на валу барабана 2 (рис. 2.1), являющегося последним кинематическим звеном производственного механизма пред редуктором и насаженном на его выходном валу. Учитывая технологические особенности работы производственного механизма за период цикла (различия в скоростях и направления движения, масс грузовой тележки), тахограмма и нагрузочные диаграммы будут представлять собой ломаные графики с отрезками, расположенными по разные стороны от оси абсцисс (оси времени) и на разном от нее удалении. Учитывая сказанное, необходимо определить силы и моменты на соответствующих интервалах движения тележки.

Рисунок 2.1 – Силы и моменты, действующие на производственный механизм при различных направлениях движения тележки.
Величина и направление момента на барабане:
 , (2.1)
, (2.1)
где  - результирующая реактивной
- результирующая реактивной  и активной
и активной  сил, Н;
сил, Н;
 - сила сопротивления от реактивной статической нагрузки, Н;
- сила сопротивления от реактивной статической нагрузки, Н;
 - коэффициент сопротивления движению, зависящий от коэффициентов трения качания по рельсу
- коэффициент сопротивления движению, зависящий от коэффициентов трения качания по рельсу  ,м, трения скольжения в подшипниках колес
,м, трения скольжения в подшипниках колес  и коэффициента к, учитывающего трения реборды колеса о рельс, торцевых частей ступицы и т.д.;
и коэффициента к, учитывающего трения реборды колеса о рельс, торцевых частей ступицы и т.д.;
 - радиус цапфы колеса, м;
- радиус цапфы колеса, м;
 - диаметр колеса, м;
- диаметр колеса, м;
 - нормальная составляющая от веса тележки (при движении вверх
- нормальная составляющая от веса тележки (при движении вверх  , а при движение вниз
, а при движение вниз  , Н);
, Н);
 - тангенциальная составляющая от веса тележки
- тангенциальная составляющая от веса тележки  , Н;
, Н;
 - вес (сила тяжести) противовеса, Н;
- вес (сила тяжести) противовеса, Н;
 - радиус барабана, м;
- радиус барабана, м;
Движение вверх:









 - угловая скорость барабана,
- угловая скорость барабана,
где V-скорость движения тележки,  ;
;
 - мощность на барабане при подъеме.
- мощность на барабане при подъеме.
Движение вниз:







 - мощность на барабане при спуске.
- мощность на барабане при спуске.
Предварительный расчет мощности электродвигателя.
Для точного расчета и выбора электродвигателя необходимо иметь тахограмму и нагрузочную диаграмму двигателя. Нагрузочная диаграмма определяется не только статическими, нагрузками, но и передаточным числом редуктора, выбор которого связан с параметрами двигателя, а так же динамическими нагрузками, которые в значительной мере зависят от инерционных масс системы электропривода, в том числе и от момента инерции двигателя. При этих условиях нагрузочная диаграмма двигателя построена быть не может. Поэтому необходимо предварительно выбрать двигатель с учетом ПВ% по средним эквивалентным значениям мощности статической нагрузки, с последующей проверкой его по условиям нагрева и допустимого значения максимального момента.

Рисунок 3.1 – Упрощенная нагрузочная диаграмма механизма
Оси пронумеровать
Предварительный выбор двигателя может быть выполнен на основании расчета среднего или эквивалентного значения статической мощности за время в пределах цикла:
 (3.1)
(3.1)
 (3.2)
(3.2)
где  - коэффициент, учитывающий отличие динамической нагрузочной диаграммы двигателя от статической.
- коэффициент, учитывающий отличие динамической нагрузочной диаграммы двигателя от статической.
 – статические мощности на валу двигателя с учетом к.п.д. редуктора и барабана при движении тележки вверх и вниз.
– статические мощности на валу двигателя с учетом к.п.д. редуктора и барабана при движении тележки вверх и вниз.


Мощность двигателя с учетом ПВ%

Заключение
В данном курсовом проекте была разработана схема электропривода производственного механизма передвижения тележки.
В ходе проектирования был выбран двигатель, генератор и асинхронный двигатель, в качестве приводного. Для данного привода была построена тахограмма и нагрузочные диаграммы, двигатель бы проверен по перегрузочной способности с учетом нагрева и переходных процессов. Проверка показала, что данный двигатель соответствует предъявляемым требованиям.
Список используемой литературы
1. «Методические указания к курсовой работе»,
под редакцией Н.С. Бурянина, Д.Ф. Зенков 1988г.
2. Чиликин М.Г., Сандлер А.С. “Теория электропривода”,
М. Энергоиздательство 1981г.
3. Вешеневский С.Н. “Характеристики двигателей в электроприводе”
М. Энергия 1977г.
4. Романов М.Н. «Методические указания по правилам оформления отчетов по лабораторным работам и расчетно-пояснительных записок для курсовых проектов», Новосибирск 1994г.
Введение
Курсовое проектирование является важным этапом изучение курса “Теория электропривода” и предлагает законченным освоение курсов теоретических основ электротехники, теории автоматического управления и электрических машин.
Целью курсовой работы является приобретение навыков в разработке, применение известных методов расчета и проектирование приводов производственных механизмов, которые бы обеспечивали высокую производительность, имели бы. Необходимо, прежде всего, уяснить технологические особенности работы механизма: величину и характер изменения статического момента, плавность и пределы регулирования скорости, частоту и условия пусков и торможений, требования к статическим и динамическим режимам и т.д., что позволит выбрать целесообразный тип и рациональную мощность привода, обеспечивающего высокую производительность производственного механизма, его надежность и долговечность, минимальные массогабаритные показатели и энергозатраты, а также возможность комплексной автоматизации данного производственного процесса.
В курсовой работе предусматривается разработка электропривода по системе генератор-двигатель с асинхронным приводом двигателем с фазным ротором для одного из общепромышленных механизмов циклического действия. Выбор такой системы электропривода обусловлен учебными задачами - закрепление знаний по курсу “Теория электропривода”.
Задание на курсовую работу
Задачей курсовой работы является разработка разомкнутой системы реверсивного электропривода производственного механизма, выбор и расчет его силовых элементов, расчет и построение нагрузочных диаграмм и тахограммы, статических и динамических характеристик, кривых переходного процессов и проверка двигателя по нагреву.
На рис. 1.1 приведена кинематическая схема механизма наклонного подъемника, электропривод которого надлежит разработать.
Рисунок 1.1 – Кинематическая схема механизма наклонного подъемника
Наклонный подъемник состоит из тележки 1, перемещающейся по рельсовому пути, уложенному под углом α к горизонтали. Тележка совершает челночное движение по перемещению груза из нижнего положения (из точки А или А’) в верхнее положение (в точку С) на расстояние ℓ или ℓ’. После разгрузки в верхнем положении тележка порожней возвращается в нижнее положении, где проводится ее загрузка, а за тем цикл повторяется.
Перемещение тележки осуществляется при помощи троса 5 (система кинематических связей, для упрощения ее изображения, приведена на рисунке 1.1 схематично), наматываемого на барабан 2, который сочленяется через редуктор 3 с двигателем 4. Для улучшения режима работы двигателя, к барабану, через трос 5, присоединяется противовес 6. При остановках в нижнем и верхнем положениях тележка удерживается с помощью электромагнитных тормозов. В общем случае предлагается, что при пуске двигателя его растормаживание происходит мгновенно в момент времени, когда электромагнитный момент двигателя Мg сравняется со статическим моментом Мс.
Цикл работы подъемника состоит из следующих этапов. Из нижнего положения, точка А (А'), загруженная тележка, разогнавшись, осуществляет движение с постоянной рабочей скоростью Vраб. После прохождения тележкой расстояния ℓ’’ (ℓ’ + ℓ’') подается сигнал на снижение напряжения питания обмотки возбуждения генератора и двигатель переключается работать на новую статическую характеристику с меньшей угловой скоростью, а тележка, притормозив под действием статических сил сопротивления, переходит на движение с ползучей скоростью Vполз. Затем отключается возбуждение генератора и тележка, под действием сил сопротивления, останавливается в точке С с последующим наложением тормозов (сигнал на срабатывание тормозов может поступать от датчиков перемещения тележки). В аварийном случае, когда тележка не останавливается в предельном положении, сигнал от концевых выключателей вызывает накладывание тормозов еще до ее остановки. После остановки тележка разгружается и затем, разогнавшись до рабочей скорости Vраб, двигается вниз до отметки, отстоящей от точки С на расстояние ℓ’’, после чего снижается напряжение питания обмотки возбуждения генератора и двигатель переключается работать на новую статическую характеристику с меньшей угловой скоростью, а тележка, притормозив под действием статических сил сопротивления, переходит на движение с ползучей скоростью. Остановка тележки в точке А (A') происходит аналогично остановке в точке С. Затем тележка загружается и на этом очередной цикл заканчивается.
Ходовая часть тележки, к.п.д. редуктора и барабана характеризуется следующими величинами:
1) диаметр колеса тележки
2) диаметр цапфы колеса
3) коэффициент трения качения колеса по рельсу
4) коэффициент трения скольжения в подшипниках колес ;
5) коэффициент, учитывающий сопротивление движению колеса от трения его реборды о рельс, от трения на торцевых частях ступицы и т.д. ;
6) к.п.д. редуктора ;
7) к.п.д. барабана .
Массогабаритные и скоростные показатели транспортного средства:
1) масса тележки mт = 60, кг;
2) масса груза mг = 240, кг;
3) масса противовеса mпр = 115, кг;
4) рабочая скорость тележки Vраб = 0,6, м/с;
5) ползучая скорость тележки Vполз = 0,05, м/с;
6) допустимое ускорение тележки адоп = 0,66, м/с2;
7) момент инерции барабана Jб = 4, кгм2;
8) диаметр барабана Dб = 0,36, м;
9) угол наклона пути α = 40, град.
Показатели работы транспортного средства и транспортного пути:
1) время загрузки tз = 10, с;
2) время разгрузки tр = 8, с;
3) длина пути движения между точками А и С ℓ = 10, м;
4) длина пути движения между точками А и A' ℓ' = 1,5, м;
5) длина пути разгона и движения груженой тележки с Vраб ℓ'' = 9, м;
6) длина пути разгона и движения порожней тележки с Vраб ℓ''' = 9,2, м.
В качестве электропривода используется система генератор-двигатель постоянного тока независимого возбуждения (Г-Д) с приводным асинхронным двигателем с фазным ротором.
При выполнении курсовой работы необходимо:
1. привести кинематическую схему механизма наклонного подъемника и в соответствии с вариантом записать его показатели;
2. определить величины моментов сопротивления относительно вала барабана для обоих направлений движений тележки;
3. определить предварительную мощность электрических машин системы с учетом ПВ% и рациональное передаточное число редуктора;
4. рассчитать и построить тахограмму и нагрузочные диаграммы , электропривода с учетом динамических нагрузок и при условии постоянства ускорений в периоды переходных процессов;
5. проверить предварительно выбранный двигатель по мощности, используя методы эквивалентных (средних) величин, и по перегрузочной способности. Представить принципиальную схему электропривода;
6. рассчитать и построить статические механические (электромеханические) характеристики для всех режимов работы привода: для груженой и порожней тележки при работе с и ;
7. рассчитать и построить графики переходных процессов электропривода:
, и для всех участков, а также динамическую механическую
характеристику ;
8. проверить двигатель по нагреву с учетом реальных переходных процессов;
9. рассчитать и выбрать пусковые резисторы приводного асинхронного двигателя.
Определение сил и моментов.
Поскольку передаточное число редуктора неизвестно и его еще предстоит определить с учетом действующих сил, то целесообразно рассчитать мощность на валу барабана 2 (рис. 2.1), являющегося последним кинематическим звеном производственного механизма пред редуктором и насаженном на его выходном валу. Учитывая технологические особенности работы производственного механизма за период цикла (различия в скоростях и направления движения, масс грузовой тележки), тахограмма и нагрузочные диаграммы будут представлять собой ломаные графики с отрезками, расположенными по разные стороны от оси абсцисс (оси времени) и на разном от нее удалении. Учитывая сказанное, необходимо определить силы и моменты на соответствующих интервалах движения тележки.
Рисунок 2.1 – Силы и моменты, действующие на производственный механизм при различных направлениях движения тележки.
Величина и направление момента на барабане:
, (2.1)
где - результирующая реактивной и активной сил, Н;
- сила сопротивления от реактивной статической нагрузки, Н;
- коэффициент сопротивления движению, зависящий от коэффициентов трения качания по рельсу ,м, трения скольжения в подшипниках колес и коэффициента к, учитывающего трения реборды колеса о рельс, торцевых частей ступицы и т.д.;
- радиус цапфы колеса, м;
- диаметр колеса, м;
- нормальная составляющая от веса тележки (при движении вверх , а при движение вниз , Н);
- тангенциальная составляющая от веса тележки , Н;
- вес (сила тяжести) противовеса, Н;
- радиус барабана, м;
Движение вверх:
- угловая скорость барабана,
где V-скорость движения тележки, ;
- мощность на барабане при подъеме.
Движение вниз:
- мощность на барабане при спуске.
Предварительный расчет мощности электродвигателя.
Для точного расчета и выбора электродвигателя необходимо иметь тахограмму и нагрузочную диаграмму двигателя. Нагрузочная диаграмма определяется не только статическими, нагрузками, но и передаточным числом редуктора, выбор которого связан с параметрами двигателя, а так же динамическими нагрузками, которые в значительной мере зависят от инерционных масс системы электропривода, в том числе и от момента инерции двигателя. При этих условиях нагрузочная диаграмма двигателя построена быть не может. Поэтому необходимо предварительно выбрать двигатель с учетом ПВ% по средним эквивалентным значениям мощности статической нагрузки, с последующей проверкой его по условиям нагрева и допустимого значения максимального момента.
Рисунок 3.1 – Упрощенная нагрузочная диаграмма механизма
Оси пронумеровать
Предварительный выбор двигателя может быть выполнен на основании расчета среднего или эквивалентного значения статической мощности за время в пределах цикла:
(3.1)
(3.2)
где - коэффициент, учитывающий отличие динамической нагрузочной диаграммы двигателя от статической.
– статические мощности на валу двигателя с учетом к.п.д. редуктора и барабана при движении тележки вверх и вниз.
Мощность двигателя с учетом ПВ%
Определение передаточного числа редуктора.
Из таблицы приложений выбираем три двигателя серии “П”, мощностью наиболее близкой к, полученной в предыдущем пункте, предварительной мощности двигателя:
Таблица 4.1
Двигатели постоянного тока сери “П” продолжительного режима, защищенные, с самовентиляцией, 220В, возбуждение независимое
| Тип двигателя
| Номинальная мощность Рном
| Номинальная частота вращения nном
| Номинальный ток якоря Iн
| Сопротивление обмотки якоря и доп. полюсов Zя+Zдп
| Число активных проводников якоря
| Сопротивление независимой обмотки Zв
| Число витков независимой обмотки на полюс Wнх
| Номинальный ток независимой обмотки Iвн
| Номинальный магнитный поток на полюс Фн
| Номинальный кпд ηн
| Момент инерции якоря J
|
|
| кВт
| Об/мин.
| А
| Ом
|
| Ом
|
| А
| мВб
| %
| кгм2
|
| П21
| 0,7
|
| 4,3
| 6,75
|
|
|
| 0,3
| 3,1
| 73,6
| 0,042
|
| П31
| 0,7
|
| 2,9
| 9,48
|
|
|
| 0,29
| 5,2
|
| 0,09
|
| П32
| 0,7
|
| 4,2
| 4,98
|
|
|
| 0,31
| 8,1
|
| 0,116
|
Выбираем двигатель, руководствуясь следующими данными:
 , (4.1)
, (4.1)
где  - передаточное число редуктора;
- передаточное число редуктора;
 - номинальная угловая скорость.
- номинальная угловая скорость.
П21:  ;
;  ;
;
 .
.
П31:  ;
;  ;
;
 .
.
П32:  ;
;  ;
;
 .
.
Руководствуясь требованием  , выбираем двигатель серии П32.
, выбираем двигатель серии П32.
Для дальнейших расчетов выбираем ближайшее меньшее стандартное передаточное число редуктора и его тип РМ-500:  .
.
Рассчитываем мощность генератора:

В качестве генератора будем использовать двигатель типа:
Таблица 4.2
Двигатели постоянного тока сери “П” продолжительного режима, защищенные, с самовентиляцией, 220В, возбуждение независимое
| Тип двигателя
| Номинальная мощность Рном
| Номинальная частота вращения nном
| Номинальный ток якоря Iн
| Сопротивление обмотки якоря и доп. полюсов Zя+Zдп
| Число активных проводников якоря
| Сопротивление независимой обмотки Zв
| Число витков независимой обмотки на полюс Wнх
| Номинальный ток независимой обмотки Iвн
| Номинальный магнитный поток на полюс Фн
| Номинальный кпд ηн
| Момент инерции якоря J
|
|
| кВт
| Об/мин.
| А
| Ом
|
| Ом
|
| А
| мВб
| %
| кгм2
|
| П42
| 1.5
|
| 9,75
| 2,92
|
|
|
| 0,69
| 5,1
| 74,1
| 0,18
|
Рассчитываем мощность АД:

Здесь всю формулу расшифровать
В качестве гонного двигателя используем асинхронный двигатель серии МТН с фазным ротором:
Таблица 4.3
Металлургические двигатели серии МТН с фазным ротором 380/220В, ПВ%=100%
| Тип двигателя
| Мощность на валу Р2Н
| Номинальная частота вращения nном
| Номинальный ток ротора Iрн
| ЭДС между кольцами неподвижного разомкнутого ротора Ер.р.
| Номинальный момент Мн, Нм
| Критический момент Мкр
| Момент инерции ротора J
| Номинальное скольжение Sн
| Критическое скольжение Sкр
| Сопротивление фазы ротора Zр
| Номинальный кпд ηн
|
|
| кВт
| Об/мин.
| А
| В
| Нм
| Нм
| кгм2
| %
| %
| Ом
| %
|
| МТН 111-6
|
|
| 8,5
|
| 20,3
|
| 0,0488
| 0,06
| 0,7
| 0,717
|
|
5. Построение тахограммы и нагрузочных диаграмм.
Тахограмма представляет собой зависимость  на интервале цикла. Для построения тахограммы необходимо определить интервалы времени работы двигателя в каждом режиме:
на интервале цикла. Для построения тахограммы необходимо определить интервалы времени работы двигателя в каждом режиме:
Подъём:
1 интервал - время разгона двигателя и длина участка пути:

2 интервал - время работы двигателя с  , соответствующей рабочей скорости перемещения тележки
, соответствующей рабочей скорости перемещения тележки  , и длина участка пути:
, и длина участка пути:

3 интервал - время перехода от  до
до  и длина участка пути:
и длина участка пути:

4 интервал - время работы двигателя с  , соответствующей «ползучей» скорости перемещения тележки , и длина участка пути:
, соответствующей «ползучей» скорости перемещения тележки , и длина участка пути:

где  - определяется на пятом интервале из условия, что после отключения напряжения обмотки возбуждения генератора
- определяется на пятом интервале из условия, что после отключения напряжения обмотки возбуждения генератора  остановка произойдет в конечной точке при замедлении под действием статических сил сопротивления.
остановка произойдет в конечной точке при замедлении под действием статических сил сопротивления.
5 интервал - время замедления скорости тележки до “0” и длина участка пути:

где  - замедление тележки под действием статических сил сопротивления после отключения напряжения обмотки возбуждения генератора , считая условно, что при этом
- замедление тележки под действием статических сил сопротивления после отключения напряжения обмотки возбуждения генератора , считая условно, что при этом  и соответственно
и соответственно  становится мгновенно равным нулю;
становится мгновенно равным нулю;
 - момент статических сил сопротивления, приведенный к валу двигателя;
- момент статических сил сопротивления, приведенный к валу двигателя;
 - момент инерции системы производственный механизм- двигатель, приведенный к валу двигателя;
- момент инерции системы производственный механизм- двигатель, приведенный к валу двигателя;
 - момент инерции произведенного механизма, приведенный к валу барабана.
- момент инерции произведенного механизма, приведенный к валу барабана.
6 интервал - время разгрузки:

Аналогично рассчитывается интервалы второй половины цикла. При этом время разгона двигателя и длина пути на спуске равны этим значениям на подъеме:
Спуск:
7 интервал:
8 интервал:

9 интервал:

10 интервал:





