Тоже самое, что и Вопрос №9 (только без частотных преобразователей!!!!).
Вопрос №5. Асинхронные электроприводы. Асинхронные электродвигатели систем автоматического регулирования. Режимы работы асинхронных машин. Способы регулирования частоты вращения АД. Силовые схемы асинхронных приводов.
Асинхронные электродвигатели широко используются для электроприводов с постоянной (нерегулируемой) частотой вращения, в которых требования по поддержанию частоты вращения сравнительно невелики. Нашли применение регулируемые асинхронные электроприводы с управлением по напряжению и частоте питания. Актуальность разработки асинхронных электроприводов обусловлена: экономическими факторами (минимум стоимости, отсутствие дефицитных видов материалов, повышенный (на 6 - 10%) коэффициент полезного действия по сравнению с приводами постоянного тока);повышенная на 50-100% удельная мощность высокочастотных (200,400,1000 Гц) асинхронных электродвигателей;пониженный момент инерции ротора по сравнению с синхронными электродвигателями;повышенная надежность (в 3 - 5 раз) по сравнению с двигателями постоянного тока.
В системах автоматического регулирования применяют как трехфазные, так и двухфазные асинхронные электродвигатели (АД). Трехфазные АД являются двигателями общепромышленного применения, двухфазные АД - это специальные двигатели, получившие название асинхронных исполнительных двигателей (АИД). В системах автоматического регулирования наибольшее распространение получили АИД с полым немагнитным ротором в виде тонкостенного стакана из сплавов алюминия. Толщина стенки стакана ротора в зависимости от мощности электродвигателя колеблется в пределах 0,1 - 1 мм. Полый ротор имеет малую массу, а следовательно, незначительный момент инерции.
Недостатком АИД с полым немагнитным ротором является большой немагнитный зазор, состоящий из двух воздушных зазоров и толщины немагнитного стакана, вследствие чего эти электродвигатели имеют значительный ток намагничивания (до 80 - 90 % от номинального тока) и соответственно низкий коэффициент мощности. Большой намагничивающий ток приводит к повышенным электрическим потерям и значительно снижает КПД электродвигателя.
Режимы работы асинхронных машин:
а) Двигательный режим: характеризуется изменением частоты вращения электродвигателя от нуля (точка пуска) до  (точка идеального холостого хода) при соответствующем изменении момента (тока) от
(точка идеального холостого хода) при соответствующем изменении момента (тока) от  до нуля (первый квадрант).
до нуля (первый квадрант).
б) Рекуперативное торможение (генераторный режим) с отдачей энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или другой причины угловая частота вращения ротора асинхронной машины превысит синхронную частоту . В генераторном режиме скольжение s < 0, ток и момент вращения также меняют знак. Режим рекуперативного торможения может быть реализован в системе преобразователь частоты - АД при остановке электродвигателя или при переходе с большей частоты вращения на меньшую. Рекуперативное торможение является наиболее экономичным видом торможения АД.
в) Динамическое торможение: применяется для быстрой остановки вращающегося двигателя. Режим динамического торможения осуществляется следующим образом: фазы статора отключаются от сети переменного тока и одна фаза, если выведен нуль, или две фазы, соединенные последовательно, подключаются к источнику постоянного тока. Постоянный ток, создает неподвижное в пространстве магнитное поле, в котором вращается ротор. Создается тормозной момент и двигатель останавливается.
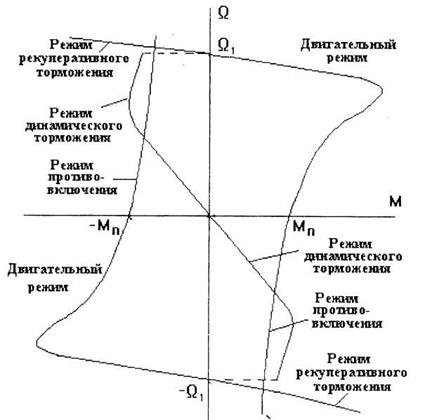
г) Торможение противовключением: данный режимимеет место тогда, когда во вращающемся двигателе переключают две фазы статорной обмотки, что приводив к изменению направления вращения поля статора: ротор и поле статора вращаются в противоположных направлениях. В режиме противовключения скольжение s>l. Двигатель потребляет из сети активную мощность, в то же время потребляется механическая мощность вращающегося ротора. Обе эти мощности преобразуются в потери, так как полезная мощность равна нулю. Ротор энергично тормозится. Если в момент, когда s =1, фазы обмотки статора не будут отключены от сети, то ротор будет разгоняться в противоположном исходному направлению вращения и произойдет реверс двигателя.
Регулирование частоты вращения АД. Существуеттри возможных способа регулирования частоты вращения:изменением частоты питающего напряжения;изменением числа пар полюсов машины;изменением значения скольжения.
а) Способ переключения числа пар полюсов
Для реализации этого способа предусматривается в обмотке статора переключение секций фаз из последовательного соединения в параллельное и наоборот. Существуют АД с несколькими обмотками статора, имеющими различное число пар полюсов. Этот способ является наиболее простым, однако частота вращения изменяется дискретно. В системах автоматического регулирования этот способ применяется редко.
б) Способ изменения величины скольжения
Величина момента вращения трехфазных АД зависит от квадрата приложенного напряжения. Меняя величину напряжения, подаваемого на фазы статора АД, например, с помощью трехфазного МУ или тиристорного преобразователя для двигателя, работающего под нагрузкой, смещаем точку установившегося режима. В настоящее время существует большое число различных схем включения тиристоров, позволяющих коммутировать статорные цепи АД и регулировать подводимое к двигателю напряжение.
При тиристорном регулировании напряжения по мере увеличения угла управления тиристоров напряжение статора принимает все более импульсный характер, возникают высшие гармонические напряжения и тока, в свою очередь вызывающие повышенные тепловые и магнитные потери, а также высшие гармонические момента вращения, являющиеся тормозными по отношению к основной частоте.
Коэффициент полезного действия АИД несколько ниже, чем у одинаковых по мощности асинхронных трехфазных двигателей из-за повышенного активного сопротивления ротора. При этом наиболее высокий КПД имеют АИД с амплитудным управлением. Поэтому рассмотрим только характеристики АИД с амплитудным управлением.
Регулировочные характеристики АИД нелинейны при всех способах управления. Наибольшая нелинейность наблюдается в режиме холостого хода (до 20%).
в) Формирование механических характеристик замкнутого электропривода
Электроприводы, регулируемые по напряжению, имеющему систему управления с замкнутыми обратными связями, находят применение при небольшом диапазоне регулирования частоты вращения.
Желаемая скорость и заданная жесткость механических характеристик асинхронного электропривода с замкнутой системой управления обеспечивается соответствующим выбором величины коэффициента усиления, регулятора скорости и напряжения сравнения (напряжение задатчика скорости).
г) Способ изменения частоты питающего напряжения
Наиболее рациональным способом плавного регулирования частоты вращения АД является частотный способ.
При небольших частотах происходит снижение значения максимального (критического) момента из-за влияния падения напряжения на активном сопротивлении обмотки статора. Для предотвращения этого эффекта следует с уменьшением частоты снижать напряжение в меньшей степени, чем это рекомендуется указанной формулой.
Частотный способ позволяет увеличить частоту вращения по отношению к номинальной в 2 - 3 раза. Ограничение - по механической прочности ротора и потерям в стали, которые увеличиваются пропорционально квадрату относительного значения напряжения. Нижний предел снижения частоты вращения относительно номинальной определяется допустимыми пульсациями скорости и величиной момента статического сопротивления при трогании двигателя с места.
При уменьшении частоты напряжения статора основной поток машины снижается за счет падения напряжения в активном сопротивлении статорных обмоток в тем большей степени, чем меньше значение частоты сети. Поток сравнительно мало меняется при частотах, близких к номинальному значению. Основным достоинством режима постоянного полного потока является то, что при всех частотах сохраняются такие же условия работы электродвигателя, как при номинальной частоте. Постоянство полного потока при всех частотах обеспечивается компенсацией падения напряжения в активных сопротивлениях статора соответствующим повышением напряжения на зажимах двигателя в функции частоты и нагрузки.
д) Векторное управление асинхронными электродвигателями
Разновидностью частотного управления АД являются частотно-токовое и фазовекторное управление током и напряжением статора асинхронного электродвигателя в полярных или декартовых координатах. Векторное управление АД позволяет решать задачи не только инвариантного управления моментом или скоростью, но и оптимального управления магнитным полем как по величине, так и по фазе по отношению к вектору тока или вектору напряжения статора. Векторное управление асинхронными электродвигателями позволяет довести качество управления асинхронными электроприводами до лучших образцов электроприводов постоянного тока: полоса пропускания 100 - 200 Гц, диапазон регулирования скорости 1: (10 000 - 20 000), номинальная частота вращения 3000 - 12 000 об/мин.
Типовые силовые схемы силовой части асинхронных электродвигателей. Силовая схема асинхронного электропривода с АИТ с отсекающими диодами приведена ниже.
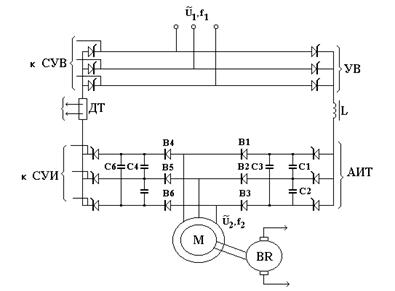
Рис.13.23.Тиристорный частотнорегулируемый асинхронный электропривод
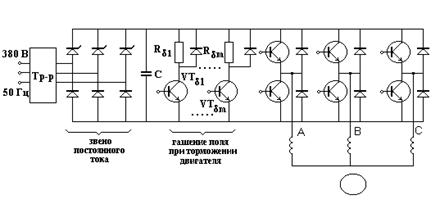
Рис.13.24. Транзисторный частотнорегулируемый асинхронный электропривод с АИН
Силовая схема электропривода, регулируемого по напряжению, имеющему систему управления с замкнутыми обратными связями по току и скорости, представлена на рис.13.26.Такие электроприводы находят применение при небольшом диапазоне регулирования частоты вращения (1: 20).
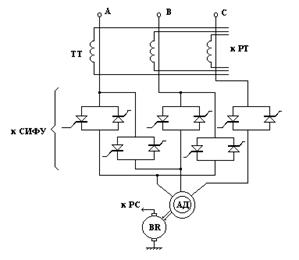
Рис.13.26.Электропривод типа СТУ-ПР-2.






