Для каждого вида СЭО и ЭСА можно указать ряд параметров и (или) признаков, характеризующих техническое состояние и дефекты(параметры, выраженные электрическими величинами- напряжение, ток, частота, сопротивление, индуктивность и т. п.; параметры, выраженные неэлектрическими величинами - температура, скорость,усилие и т. п.; признаки- наличие следов нагара на контактной поверхности, трещин, пыли, влаги и т. п.). В зависимости от применяемого метода диагностирования используются те или иные из них, называемые диагностическими параметрами и (или) признаками.
Если значения диагностических параметров (признаков) объекта не поддаются непосредственному измерению,то они находятся обработкой значений других параметров, связанных с диагностическими известными зависимостями.
Определение диагностических параметров формальными методами предполагает построение и анализ диагностической модели объекта. Такие методы дают возможность выбрать диагностические параметры, достаточные или необходимые для проведения соответствующего вида диагностирования; проверки исправности, работоспособности, функционирования, поиск; дефекта.
Выбор совокупности диагностических параметров является ответственной задачей разработки системы технического диагностирования СЭО и ЭСА. Успешное решение этой задачи возможно только при глубоком знании и тщательном анализе СЭО и ЭСА и их элементов как объектов диагностирования. При выборе диагностических параметров учитывается их информативность, доступность для измерения и контроля, стоимость и время измерения.
Предпочтение отдается параметрам, имеющим прямую функциональную связь с техническим состоянием диагностируемого элемента или объекта, обладающим большей информативностью, относительно легко и по возможности непосредственно измеряемым простыми средствами.
Контролировать все параметры, определяющие техническое состояние сложных СЭО и ЭСА (полный контроль), практически невозможно, поэтому СТД контролируют некоторое множество наиболее существенных параметров.
Величина, показывающая в какой мере проверка объекта по выбранной совокупности параметров отличается от полного контроля, называется полнотой контроля. В простейшем случае полнота контроля VП.К. количественно может быть оценена отношением числа контролируемых параметров NK к числу параметров N, которое необходимо для оценки технического состояния объекта
 (4.10)
(4.10)
В ряде случаев оценка (4.10) не может быть достаточной, так как при этом не учитывается информативность отдельных диагностических параметров. Под информативностью диагностического параметра понимается количество информации о состоянии объекта, которое можно получить в результате контроля данного параметра. Учет информативности диагностических параметров производится на основе полученной в теории информации формулы, устанавливающей связь между вероятностями сообщений Piи числом их к, с одной стороны, и количеством информации I, снимающим неопределенность в определении состояния системы- с другой:
 (4.11)
(4.11)
Информация I монотонно возрастает при росте k; 1=0 при одном из Pi=1, I =1 при двух равновероятных сообщениях; при k равновероятных сообщениях, когда для всех сообщений Pi==1/k информация (4.11) максимальна

Пусть электрическая система (объект) и каждый из ее функциональных элементов могут находиться в двух состояниях- работоспособном и неработоспособном. Вероятность нахождения системы в работоспособном состоянии Рc может быть оценена как вероятность безотказной работы всех ее n функциональных элементов  ,а вероятность нахождения системы в неработоспособном состоянии как
,а вероятность нахождения системы в неработоспособном состоянии как  , где Pi- n вероятность безотказной работы i-го функционального элемента.
, где Pi- n вероятность безотказной работы i-го функционального элемента.
Исходная неопределенность состояния системы (энтропия) до начала контроля диагностических параметров согласно (4.11) равна
 (4.12)
(4.12)
В результате контроля i-го параметра из n функциональных элементов системы проверяется только часть элементов  в случае двух возможных результатов контроля параметров норме (1), не в норме (0)-вероятность положительного (1) -исхода контроля параметра будет
в случае двух возможных результатов контроля параметров норме (1), не в норме (0)-вероятность положительного (1) -исхода контроля параметра будет  . Информативность i-го параметра находится как разность между исходной неопределенностью состояния системы Hо и неопределенностью Hi, остающейся после контроля i-го параметра и усредненной по возможным исходам контроля
. Информативность i-го параметра находится как разность между исходной неопределенностью состояния системы Hо и неопределенностью Hi, остающейся после контроля i-го параметра и усредненной по возможным исходам контроля


где H(i) — неопределенность состояния системы, оставшаяся после того, как было установлено, что i-и параметр находится в норме; при положительном результате проверки 1-го параметра неопределенность состояния зависит только от вероятности безотказной работы  и вероятности отказа
и вероятности отказа  непроверенной группы элементов.
непроверенной группы элементов.
Информация, получаемая при одновременном контроле Nk диагностических параметров (из общего их числа N), позволяющих контролировать nП элементов системы, определяете: аналогично (4.13)
 (4.14)
(4.14)
С учетом информативности контролируемых параметров полнота контроля может быть оценена по формуле
 (4.15)
(4.15)
 Минимальное число диагностических параметров, которое нужно контролировать для обеспечения заданной полноты контроля определяется из условия
Минимальное число диагностических параметров, которое нужно контролировать для обеспечения заданной полноты контроля определяется из условия
 (4.16)
(4.16)
Если необходимо учитывать стоимость CNK или время tNk контроля, то диагностические параметры, удовлетворяющие условию (4.16), выбираются так, чтобы было максимально соответствующее отношение:
 или
или 
При отсутствии количественных показателей безотказности элементов выбор диагностических параметров СЭО и ЭСА может быть выполнен путем опроса специалистов (экспертов)-судовых инженеров-электромехаников.С помощью метода экспертных оценок, используя опыт, знания и интуицию высококвалифицированных судовых специалистов, можно, например, построить упорядоченный (ранжированный) ряд параметров, определяющих техническое состояние СЭО и ЭСА.
Важное значение имеет правильный выбор количества опрашиваемых специалистов. Численность группы специалистов-экспертов должна быть достаточной для того, чтобы оценка каждого незначительно влияла на групповую оценку. В предположении о том, что вероятность правильного ответа экспертов на поставленные вопросы Р(пЭ) возрастает по показательному закону Р(пэ) =1 — (1-Р)пэ и вероятность правильного ответа всей группы экспертов задана Р(пэ)=1-(1—Р)nэ, минимальное число опрашиваемых экспертов может быть определено по формуле.
 , (4.17)
, (4.17)
где P—вероятность правильного ответа одного эксперта.
Полученное по формуле (4.17) значение nэ округляется до ближайшего целого числа.
Максимальное количество экспертов определяется с учетом общего числа специалистов, способных выступить в роли эксперта, важности диагностируемой системы или устройства, методов обработки получаемой от экспертов информации. Обычно численность группы экспертов не превышает 10...15 чел.,так как стремление увеличить численность группы может привести к включению в ее состав специалистов недостаточной квалификации, а также большой трудоемкости обработки результатов опроса.
Эксперты определяют номер Xji каждого параметра по важности этого параметра с точки зрения получения технического диагноза: чем важнее, по мнению эксперта, параметр, тем меньший номер ему присваивается. Результаты опроса экспертов сводятся в таблицу (табл. 4.6), в которой через т обозначено количество ранжируемых параметров (признаков) системы.
Согласованность мнений экспертов при ранжировке параметров определяется с помощью коэффициента конкордации

где
Таблица 4.6.Результаты опроса экспертов для выбора диагностических параметров
| Эксперты
| Ранги параметров
|
|
.
.
.
j
.
.
.
nэ
|
|
| …
| i
| …
| m
|
| x11
x21
.
.
.
xj1
xnэ1
| x12
x22
.
.
.
xj2
xnэ2
| …
…
…
…
| x1i
x2i
.
.
.
xji
xnэi
| …
…
…
…
| x1m
x2m
.
.
.
xjm
xnэm
|
Коэффициент конкордации изменяется от нуля до единицы (приW=0 cвязи между ранжировками нет и они все случайны, а при W=1 все эксперты одинаково ранжируют показатели). В ряде случаев при достаточно большом количестве параметров эксперты затрудняются в ранжировке всего набора параметров сразу, тогда суммарную ранжировку можно получить методом парных сравнений. Для этого каждому эксперту в случайном порядке предъявляются все сочетания из всех m параметров по два, и эксперт указывает, какой показатель, предпочтительнее в каждой паре. Результирующая ранжировка параметров получается путем соответствующей обработки результатов парных сравнений.
На основе полученного ранжированного ряда параметров- (признаков) с учетом заданных показателей диагностирования могут быть выбраны диагностические параметры путем последовательного отбрасывания последних членов ряда.
Выбор параметров для контроля технического состояния. При выборе параметров для контроля технического состояния важное значение имеют требуемая полнота контроля и используемая диагностическая модель СЭО и ЭСА.
Если диагностическая модель задана в виде аналитической зависимости обобщенного показателя технического состояния от определяющих параметров, то необходимо контролировать все параметры, учитываемые моделью, и при этом обеспечивается полный контроль технического состояния по обобщенному показателю.
Минимальная совокупность параметров для контроля технического состояния СЭО и ЭСА по их функционально-структурной модели может быть выбрана с помощью матрицы взаимозависимости выходных функций. Например, полный контроль технического состояния устройства, функционально-структурная модель которого представлена на рис. 4.3, может быть осуществлен при выборе минимальной совокупности контролируемых параметров, которая зависела бы от состояния всех функциональных элементов Э1...Э5 устройства. Из матрицы, представленной в табл. 4.4, следует, что такими параметрами являются Z3 и Z5, так как при отказе любого из пяти функциональных элементов Э1…Э5 обязательно произойдет недопустимое изменение значений по крайней мере одной из выходных функций Z3 или Z5.
Минимальная совокупность контролируемых параметров при известной логической модели выбирается из условия работоспособности объекта диагностирования. Для схемы логической модели, представленной на рис.4.3, условие работоспособности (4.7) соответствует исправному состоянию всех пяти функциональных элементов,
т.е. конъюнкция выходных функций всех элементов должна быть равна единице. Чтобы определить минимальную совокупность контролируемых параметров, нужно конъюнкцию выходных функций (4.7) выразить через функции состояния и выходные параметры всех элементов модели:
 (4.18)
(4.18)
Согласно логической модели
 (4.19)
(4.19)
Выходной параметр х32 является независимым, так как при проверке обратная связь разрывается. С учетом формулы (4.19) равенство (4.18) может быть представлено в виде

откуда следует, что выходные функции z3 и z5 учитывают изменение состояния всех функциональных элементов логической модели и, значит, могут быть выбраны в качестве минимальной совокупности контролируемых параметров для полного контроля технического состояния устройства.
В случаях, когда полный контроль технического состояния реализовать не представляется возможным, выбор контролируемых параметров сводится к определению такой совокупности доступных для контроля параметров, которая позволяла бы получить максимальное количество информации о состоянии СЭО или ЭСА. Использование информационного метода к выбору совокупности контролируемых параметров целесообразно рассмотреть на конкретном примере.
Пример. Пусть известна функционально-структурная модель электрической системы (рис. 4.7). Требуется определить выходные функции, необходимые для полного контроля работоспособности системы Уп.к=1 и выбрать две выходные функции, контроль которых позволяет получить максимальную информацию о состоянии системы. Вероятности безотказной работы элементов системы известны: P1=0,95; Р2=0,99; Р3=0,90; Р4=0,9б; Р5=0,92; Р6=0,98; Р7=0,97; Р8=0,93.
Выходные функции для полного контроля системы z3, z5 и z8 можно определить из матрицы взаимозависимости внешних выходных функций г3, z5 и г8, приведенной в табл. 4.7 (рис. 4.7).
В предположении о том, что отказ любого из восьми элементов системы приводит к
отказу системы (переход в неработоспособное состояние), исходная энтропия системы (при отсутствии контроля) в соответствии с формулой (4.12) будет равна

Таблица 4.7. Матрица взаимозависимости внешних выходных функций для функционально-структурной модели
| Внешние выходные функции
| Элементы модели
|
|
z3
z5
z8
|
|
|
|
|
|
|
|
|
| +
+
-
| +
-
-
| +
-
-
| -
+
-
| -
+
-
| +
+
+
| +
+
+
| -
-
+
|
Как видно из табл.4.7, при контроле z3 и z5 состояние элементов 4 и 5 не контролируется; при этом информация о состоянии системы согласно формуле (4.14)



полнота контроля определяется по формуле (4.15)

При контроле только z3 и z5 не контролируется элемент 8; информация о состоянии системы будет


полнота контроля 
При контроле только z3 и z5 не контролируются элементы 2 и 3; тогда информация о состоянии системы



Таким образом, в качестве контролируемых следует выбрать параметры z3 и z5, так как в этом случае достигается наибольшая полнота контроля при двух контролируемых параметрах.
При отсутствии количественных показателей безотказности функциональных элементов, как указывалось выше, выбор параметров для контроля технического состояния может быть осуществлен с использованием метода экспертных оценок.
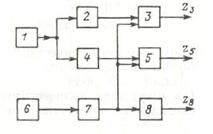
Рис. 4.8. Функциональная схема объекта диагностирования.
Выбор параметров для поиска дефектов. Контролируемые параметры для поиска дефектов выбираются в зависимости от используемой диагностической модели и заданной глубины поиска дефекта. Для объекта диагностирования, модель которого представлена без учета структуры в виде отдельных, не связанных друг с другом функциональных элементов, необходимо контролировать выходные параметры (функции) всех функциональных элементов. Если представлена диагностическая модель объекта с учетом функциональных связей элементов, то при поиске дефекта могут контролироваться выходные параметры не всех функциональных элементов объекта. Сокращение контролируемых параметров достигается путем учета связей между элементами объекта, а также за счет учета только одиночных дефектов (вероятность появления в системе одиночных дефектов значительно выше, чем вероятность одновременного появления двух и более отказов).
Выбор контролируемых параметров для поиска дефекта в системе при известной ее функциональной схеме производится следующим образом. Пусть объект диагностирования, состоящий из восьми функциональных элементов, задан функциональной схемой, показанной на рис. 4.8. На основе анализа этой схемы строится таблица функции неисправности (табл. 4.8), в которой каждая строка определяет двоичный код технического состояния объекта при отказе соответствующего одного элемента.
Состояние ео соответствует состоянию выходов, когда отказавших элементов в объекте нет.
Из табл. 4.8 видно, что коды состояний e0…e8 не совпадают, и значит, при контроле всех выходных функций z1…z8 различимы все одиночные отказы элементов в объекте. Чтобы сократить количество контролируемых параметров при поиске одиночных отказов, надо на основе табл. 4.8 построить такую таблицу функций неисправностей, в которой при неизменном числе строк и различии кодов строк было бы меньшее число столбцов, т. е. меньшее число контролируемых параметров.
Таблица 4.8. Таблица функций неисправности для схемы на рис. 4.8.
| ei
| zi
|
|
e0
e1
e2
e3
e4
e5
e6
e7
e8
| z1
| z2
| z3
| z4
| z5
| z6
| z7
| z8
|
|
|
|
|
|
|
|
|
|
Таблица 4.9. Минимизированная таблица функций неисправностей
| ei
| zi
|
|
e0
e1
e2
e3
e4
e5
e6
e7
e8
| z4
| z5
| z7
| z8
| z2
|
|
|
|
|
|
|
В таблицу с минимальным числом контролируемых параметров (табл. 4.9) прежде всего войдут столбцы с параметрами, соответствующими неразветвляющимся выходам элементов z4,z5,z7,z8. Если контролировать только эти четыре параметра, то, как видно из табл. 4.9, не будут различаться 1-й и 5-й, 2-й и 6-й, 3-й и 4-й дефектные элементы. По табл. 4.8 не трудно установить, что в табл. 4.9 нужно еще включить столбец с параметром z2 и тогда все одиночные дефекты в объекте будут различимы.
Таким образом, в результате контроля полученной минимизированной совокупности параметров определяются все одиночные отказы элементов диагностируемой системы; коэффициент глубины поиска дефекта (4.1) равен единице. Если произвести контроль всей минимизированной совокупности параметров невозможно, коэффициент глубины поиска дефекта уменьшается. В этом случае его значение легко рассчитать по данным табл. 4.9.





