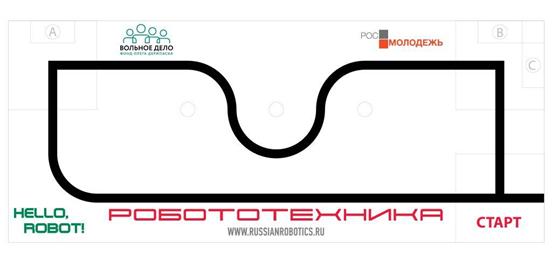
Для сравнения выбранных алгоритмов управления было использовано игровое поле для соревнований «Hello! Robot! Биатлон» (Рисунок №11).
Как проводилось тестирование алгоритмов: в чип робота заливался скетч с определённым алгоритмом, робот устанавливался на основной круг игрового поля, запускался секундомер, и робот начинал движение, которое продолжалось ровно один круг, после чего секундомер останавливался. Каждый алгоритм управления испытывался 5 раз. В таблице №1 приведены основные значения мощности подаваемой на двигатели и коэффициентов для каждого регулятора, при которых робот двигался стабильно вдоль чёрной линии и не сбивался при поворотах 90o.
Таблица №1. Основные значения мощности и коэффициентов регуляторов.
|
| Регуляторы
|
| Р
| П
| П+куб
| ПД
| ПД + регулировка скорости
| ПД+куб
|
| Мощность (max =100)
|
|
|
|
| ≈100
|
|
| Значения коэффициентов
|
| k1=7
| k1=5
k2=0.0055
| k1=5
k2=45
| k1=5
k2=35
kv=0.3
| k1=5
k2=38
k3=0.005
|
В таблице №2 представлено время тестирования каждого регулятора.
Таблица №2. Сравнительная таблица времени движения робота управляемого различными системами.
| №
| Р (с)
| П (с)
| П+куб (с)
| ПД (с)
| ПД+куб (с)
| ПД с регулятором
скорости (с)
|
|
| 18.99
| 20.18
| 19.27
| 16.51
| 17.03
| 14.85
|
|
| 19.80
| 20.01
| 19.24
| 16.71
| 17.36
| 14.75
|
|
| 19.51
| 20.58
| 19.37
| 16.77
| 17.25
| 14.64
|
|
| 19.50
| 20.34
| 19.57
| 16.96
| 17.54
| 15.23
|
|
| 20.11
| 20.25
| 19.45
| 16.72
| 17.14
| 15.09
|
Из данной таблицы видно, что самое лучшее время движения робота вдоль чёрной линии показывает пропорционально-дифференциальный регулятор с изменением скорости. Как и предполагалось теоретически. Это и есть оптимальный регулятор, для управления роботизированной платформой на базе Arduino.
Результаты.
Таблица №3. Среднее время прохождения роботом трассы, используя различные регуляторы
| Регулятор
| Время прохождения
трассы (среднее) (с)
|
| Релейный
| 19.58
|
| Пропорциональный
| 20.27
|
| Пропорциональный с кубической составляющей
| 19.38
|
| Пропорционально-дифференциальный
| 16.73
|
| Пропорционально-дифференциальный с кубической составляющей
| 17.26
|
| Пропорционально-дифференциальный с регулятором скорости
| 14.90
|
ЗАКЛЮЧЕНИЕ
По результатам данного исследования из шести выбранных нами систем управления оптимальной системой является – пропорционально-дифференциальная с регулятором скорости. Именно этот регулятор показал лучшее время прохождения робота по трассе «Hello! Robot! Биатлон». Данные полученные в результате исследования могут быть применены на занятиях по робототехнике в образовательных учреждениях, а так же при подготовке учащихся к различным соревнованиям по робототехнике в которых используется платформа Arduino. Для данного робота была разработана инструкция по сборке (Рисунок 12), которая упростит сборку робота с использованием Arduino.
Выводы:
1. Обоснованно выбраны алгоритмы автоматического управления: релейный регулятор, пропорциональный регулятор, пропорциональный регулятор с кубической составляющей, пропорционально-дифференциальный регулятор, пропорционально-дифференциальный регулятор с кубической составляющей, пропорционально-дифференциальный с регулятором скорости.
2. Данные алгоритмы переведены на язык программирования Arduino IDE.
3. Разработан робот для отладки алгоритмов управления.
4. Выбран оптимальный алгоритм управления для данного робота.
5. Существует возможность совместного использования элементов платформы Lego и Arduino.
6. Разработана инструкция по сборке робота.
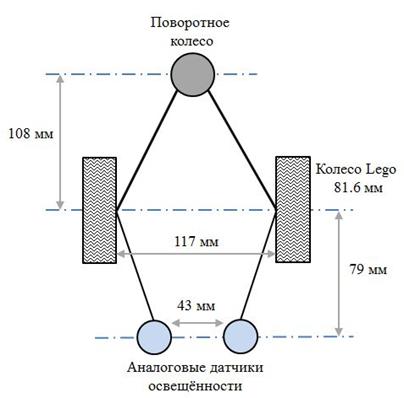
7. Создана геометрическая модель нашего робота.
8. Составлена сравнительная таблица значений мощности и коэффициентов регуляторов.
Список литературы
1. Филиппов С.А. Робототехника для детей и родителей. - СПб.: Наука, 2011. – стр. 153.
2. Филиппов С.А. Робототехника для детей и родителей. - СПб.: Наука, 2011. – стр. 194.
3.
4. Зайцев Г.Ф. Теория автоматического управления и регулирования. Издание 2-е. Киев «Быща школа» 1988.
5. Бесекерский, В.А. Микропроцессорные системы автоматического управления. Санкт-Петербург: «Машиностроение», 1988.
6. Филиппов С.А. Робототехника для детей и родителей. - СПб.: Наука, 2011. – 263с.
7. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Издание 3-е. Москва "Наука" 1975.
8. Ардуино.ру Язык программирования Arduino IDE [Электронный ресурс]. – Режим доступа: http://arduino.ru/Reference
9. Ардуино.сс Официальный сайт Arduino [Электронный ресурс]. – Режим доступа: http://arduino.cc/
10. Макет поля соревнований «Hello! Robot! Траектория» [Электронный ресурс]. – Режим доступа: http://www.russianrobotics.ru/directions/hellorobot/
11. Робототехника.ру Интернет магазин. РОБОТОТЕХНИКА. [Электронный ресурс]. – Режим доступа: http://www.robototehnika.ru/

|
| Рисунок 1. Образовательный набор Lego Mindstorms NXT
|

|
| Рисунок 2. Платформа Arduino Uno
|
|
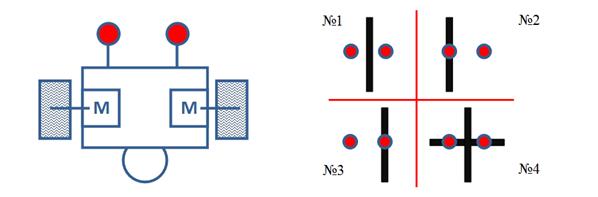
| Рисунок 3. Модель робота с двумя датчиками освещённости и варианты расположения двух датчиков освещённости над чёрной линией
|
|
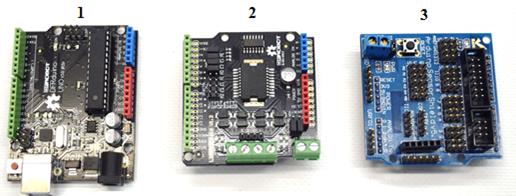
| Рисунок 4.
1- Arduino Uno; 2- Драйвер моторов; 3- Плата расширения подключения датчиков (Сенсор шилд)
|

|
| Рисунок 5. Шасси Gekko Sport-mini 2wd
|
|
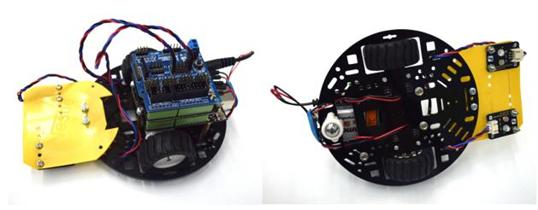
| Рисунок 6. Готовый робот №1
|

|
| Рисунок 7. Поворотное колесо стандартной модели Lego Mindstorms
|

|
| Рисунок 8. Кабель переходник
|
|
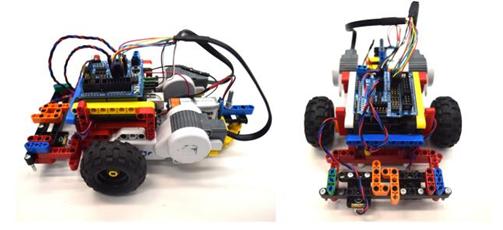
| Рисунок 9. Робот №.2
|
|
| Рисунок 10. Геометрическая схема модернизированного робота
|
|
| Рисунок 11. Игровое поле Hello, Robot! Биатлон
|

|
| Рисунок 12. Инструкция по сборке робота
|






