Одно из весьма важных достоинств моделирования состоит в возможности получить ответы на многие вопросы задолго до создания натурного ЛА. Упрощенную модель, быстро построенную по предварительным исходным данным, можно испытать на самых ранних этапах проектирования. Затем, производя уточнения модели по мере проработки проекта, можно отслеживать изменение характеристик ЛА в течение всего процесса разработки. Это не только облегчает работу ОКБ, но и позволяет избежать непреднамеренного ухудшения флаттерных характеристик, которое может возникнуть как результат совершенствования других свойств ЛА при проектировании.
Такая практика в аэродинамических трубах малых скоростей применялась еще с 40-50-х годов прошлого века. В скоростных аэродинамических трубах работа в этом направлении была начата позднее ‑ в 50-60-х годах. Она потребовала разработки новых конструктивных схем моделей ‑ простых в изготовлении и дешевых. Желательно было, чтобы ремонтные и восстановительные работы были тоже простыми и быстро выполнимыми. Среди таких схем наибольшее распространение получили модели с фанерным лонжероном-кессоном. Лонжерон выполняют в виде широкого сердечника прямоугольного сечения с направлением волокон рубашки фанеры вдоль оси жесткости. Обшивка сердечника изготавливают тоже из фанеры, но с направлением волокон рубашки под некоторым углом к оси жесткости (рис. 8).

Рисунок 8. Схемы фанерных лонжеронов
По такой же схеме строят модели для испытаний в аэродинамической трубе малых скоростей, что дает возможность «стыковать» результаты испытаний в трубах малых и больших скоростей. При этом приходится преодолевать следующие трудности.
Модели одного и того же ЛА, выполненные строго по условиям подобия и испытанные в разных аэродинамических трубах, после пересчета на натуру результатов испытаний должны иметь совпадающие границы устойчивости, если в эксперименте не были допущены ошибки. При испытаниях на малых числах М, когда сжимаемость воздуха еще не может заметно проявляться, достижение границы флаттера происходит за счет повышения плотности воздуха ρ в рабочей части, причем плотность воздуха ρ должна быть тем больше, чем меньше число М, при котором желательно достичь флаттера. Следовательно, для соблюдения подобия по массам необходимо производить дополнительную загрузку моделей так, чтобы числа Nw у модели, испытанной в низкоскоростной АДТ, совпадали с числами Nw, реализуемыми в скоростной АДТ.
Флаттер органов управления
Из всех летных происшествий, когда на ЛА возникал флаттер, большая часть приходилась на флаттер органов управления. Особенно участились такие случаи при достижении ЛА трансзвуковых скоростей полета. В этот же период времени был обнаружен факт возникновения отрицательного демпфирования при колебаниях рулевых поверхностей, когда числа М достигали значений, близких к единице. Объяснялся этот факт неустойчивостью местных скачков уплотнения, перемещающихся вдоль хорды рулевых поверхностей при их вращательных колебаниях. В этих случаях для возникновения автоколебаний не требовалось участия в явлении иных степеней свободы, кроме вращения органа управления вокруг оси навески. Такие колебания получили название «флаттер с одной степенью свободы», «маховая тряска». Этим подчеркивалось их принципиальное отличие от случаев обычного «классического» флаттера, когда в явлении участвуют как минимум две степени свободы.
Поскольку главной причиной явления этого типа считалось движение местных скачков уплотнения, то автоколебания должны были начинаться при достижении строго определенного числа Мкр, почти независимо от величины скоростного напора q. Кроме того, автоколебания не могли быть «излечены» путем весовой балансировки органов управления. Иными словами, в таких случаях автоколебания лишались черт, присущих «классическим» формам флаттера.
Для исследования этого явления был поставлен опыт в скоростной аэродинамической трубе на специальной установке, которая должна была обеспечить вращательные колебания с одной степенью свободы отсека крыла относительно оси, параллельной передней кромке. Внешне картина автоколебаний выглядела именно так‑присутствовала одна степень свободы‑поворот отсека крыла вокруг оси вращения.
Но на самом деле это впечатление оказалось ошибочным, поскольку автоколебания удалось устранить путем установки на отсек крыла выносных балансиров. Это свидетельствовало об участии в колебаниях других степеней свободы, хотя при конструировании установки были приняты специальные меры, чтобы исключить колебания более чем с одной степенью свободы.
Примерно в это же время в зарубежной литературе появилось описание установки для исследования флаттера с одной степенью свободы, в которой для обеспечения колебаний только с одной степенью свободы были приняты экзотические меры. В качестве крыла использовалась высокопрочная стальная лента длиной 500 мм с обтекаемым сечением, имевшая хорду 50 мм. Лента была заделана по концам в подшипники, обеспечивавшие вращение вокруг продольной оси. Дополнительно она растягивалась усилием - 50000 Н, чтобы исключить возможность изгиба.
Очевидно, что установки такого типа могут предназначаться только для физических опытов с целью проверки принципиальных выводов теории. При этом очень важно, чтобы явление не искажалось сопутствующими факторами. Напротив, задача моделирования флаттера реальных ЛА требует воспроизводить натуру с максимально возможным числом степеней свободы. Поэтому от физических опытов по исследованию колебаний с одной степенью свободы нельзя требовать исчерпывающих сведений о безопасности от флаттера реальной конструкции, которая всегда является многостепенной.
В подтверждение этого сошлемся на летное происшествие при испытаниях одного из опытных самолетов. При достижении этим самолетом числа М = 0,93 возникли колебания киля с рулем направления, приведшие к разрушению законцовки киля и верхней части руля направления.
Для исследования этого случая была разработана и испытана модель киля с рулем. На модели приближенно моделировались жесткости на изгиб и кручение киля и руля направления. Кроме того, была предусмотрена возможность варьирования жесткости проводки управления рулем.
В исходном варианте на этой модели при М ~ 0,93 возникли мощные колебания киля и руля с частотой, совпавшей после пересчета на натуру по масштабным коэффициентам, с частотой колебаний, зафиксированной в полете. Величина достигнутого при этом скоростного напора возрастала при увеличении степени весовой балансировки руля направления. Была предпринята попытка выяснить, какова роль других (кроме вращения руля) степеней свободы в возникших колебаниях. С этой целью модель была расчалена несколькими тонкими расчалками, перпендикулярными плоскости киля, оставлявшими лишь свободу вращения руля и исключавшими возможность деформаций киля и руля (рис. 9). При этих условиях в обследованном диапазоне М и q колебания модели не возникали.

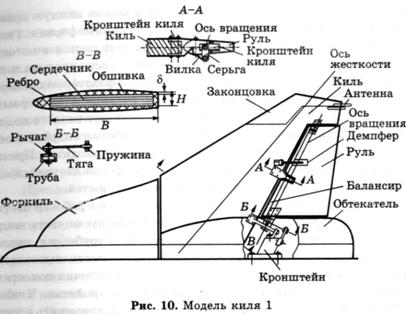
В заключение отметим, что, поскольку эти исследования проводились не на целых моделях ЛА, а на моделях его частей — килей (рис. 10), стабилизаторов и крыльев, то их масштаб длин KL мог быть существенно увеличен.
За счет этого пропорционально увеличивалось число Рейнольдса (Re). За счет увеличения плотности воздуха в рабочей части трубы при одновременном увеличении масштаба жесткостей модели появилась возможность достигать натурных значений числа Re. В результате стало реальным одновременно соблюсти требования подобия как по сжимаемости, так и по вязкости воздуха (Мм = Мн, ReM = ReH). При этом было выяснено следующее. Поскольку скорость звука а и вязкость воздуха μ связаны с температурой воздуха Т в рабочей части (а ~ Т1/2, m~ Т3/4), то соотношения Мм = Мн, ReM = ReH накладывают дополнительные условия на свободу выбора масштаба плотности Кρ и скоростного напора Kq - оба этих масштаба оказываются зависимыми от масштаба длины KL.
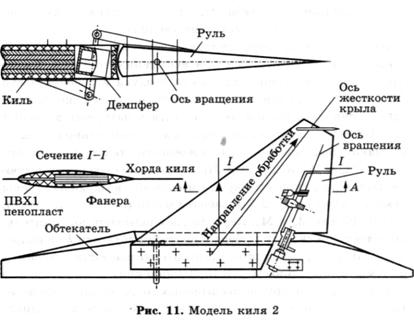
Использование крупномасштабных моделей для исследований флаттера органов управления в промышленной аэродинамической трубе позволило решить и весьма важную практическую задачу — создать модели (рис. 11) с демпферами. Гидравлические демпферы применяют для устранения в потоке колебаний отклоняющихся поверхностей и часто оказываются единственным реальным средством борьбы с флаттером органов управления скоростных ЛА. При этом очевидное на первый взгляд решение — применить принцип конструктивного подобия и оснастить модели уменьшенными копиями гидравлических демпферов — на практике связано с техническими трудностями обеспечения необходимой герметичности всех полостей демпфера.
Сечениие А-А