Методические указания
по самостоятельной работе
для студентов направления 6.070104 «Морской и речной транспорт»
специализации «Судовождение и промышленное рыболовство»
Форма обучения - дневная
Курс – 3
Керчь 2010
Введение
Настоящие методические указания предназначены в помощь студенту при самостоятельном изучении дисциплины «Механика орудий лова», содержат наиболее важный теоретический материал в лаконичном изложении и практические задания с алгоритмами их решения.
Целью изучения дисциплины «Механика орудий лова» является получение студентами знаний об особенностях применения законов обтекания жидкостями, применительно к орудиям лова. Эти знания являются базой для дисциплины «Основы проектирования и конструирования орудий лова».
Задачей дисциплины является изучение гидродинамических сил и формы орудий лова и закрепление этих знаний практическими навыками.
В процессе изучения дисциплины, студент должен прочесть теоретический материал, при необходимости обращаясь к литературным источникам, приведенным в конце каждой темы. После изучения теории, необходимо решить задачи, которые также приводятся в конце темы. Задачи по всем темам, кроме расчета располагаемой тяги судна, приведены из одного источника – [2]. В случае, когда в условии имеются варианты исходных данных, студент выбирает свой вариант по последней цифре в зачетке.
В результате изучения курса механики орудий лова, студент должен:
ЗНАТЬ
– природу внешних сил, действующих на орудия лова;
– механику гибкой нити;
– механику регулярной и нерегулярной сети (плоской и пространственной);
– механику отдельных важнейших орудий лова;
– основы теории физического моделирования орудий лова.
УМЕТЬ:
– рассчитывать внешние силы, действующие на орудия лова;
– составлять расчетные схемы орудий лова, и решать на их основе задачи о форме орудий лова, об усилиях, возникающих в элементах или деталях орудий лова;
– рассчитывать критерии подобия и на их основе масштабы подобия.
Содержание дисциплины.
| № темы
| Объем (час)
| Наименование тем,
краткое содержание материала
|
| |
|
| Внешние силы, действующие на орудия лова
|
|
|
| Гидростатические силы, силы трения по грунту, усилия, развиваемые рыбой.
Гидродинамические силы сопротивления орудий лова и их деталей. Сопротивление тел стабильной формы: шар, цилиндр, пластина.
|
|
| Гидродинамические силы сопротивления сетей: плоских, перпендикулярных к потоку, параллельных потоку, под любым углом αк потоку, сопротивление объемных сетей.
|
|
| Тяговые характеристики судов
|
| |
|
| Механика гибкой нити
|
|
|
| Аналитический расчет формы и натяжения гибкой нити. Гибкая нить как цепная линия. Гибкая нить как парабола.
|
|
| Графостатический способ расчета гибкой нити.
|
|
| Механика сетей
|
|
|
| Геометрия и статика плоских регулярных сетей.
Геометрия и статика объемных регулярных и нерегулярных сетей.
|
|
| Механика основных орудий лова
|
|
|
| Механика трала. Расчетные схемы в трех плоскостях пространства. Задачи, решаемые с помощью расчетных схем: горизонт хода трала, вертикальное раскрытие трала, горизонтальное раскрытие трала, усилия в деталях трала.
|
|
| Механика кошельковых неводов. Расчетные схемы для определения длины невода, высоты невода, скорости погружения нижней подборы; усилий, возникающих при кошельковании, при выборке невода.
|
|
| Механика дрифтерных порядков. Расчетные схемы для определения горизонта хода сетей, длины стояночного вожака, формы сетей во время дрейфа; усилий в деталях порядка.
|
|
| Механика ярусов. Расчетные схемы для определения формы хребтины во время дрейфа, глубина хода крючков, усилий в деталях яруса.
|
|
| Физическое моделирование орудий лова
|
|
|
| Теория подобия и размерностей. Вывод уравнений основных критериев подобия.
|
|
| Методика расчетов масштабов подобия в условиях недостаточности основных уравнений связи масштабов. Совместимость критериев подобия.
|
|
| Моделирование тралов. Определяющие критерии подобия. Расчет масштабов подобия. Особенности моделирования других важнейших орудий лова.
|
|
| Экспериментальные установки и комплексы для исследования механики орудий лова. Методы экспериментальных работ. Приборная техника. Методы обработки экспериментов.
|
Содержательный модуль:
Внешние силы, действующие на орудия лова.
Тема ГИДРОДИНАМИЧЕСКИЕ СИЛЫ
Результирующая гидродинамических сил приложена в точке, называемой центром давления. Значение результирующей гидродинамических сил R рассчитывается по формуле
 (1.1)
(1.1)
где с — безразмерный гидродинамический коэффициент; р — плотность жидкости, кг/м3; v — скорость движения тела (жидкости), м/с; F — характерная площадь тела, м2.
Справочные данные о плотности воды в зависимости от температуры и солености приведены в приложении 1.
Детали оснастки орудий лова представляют собой тела, близкие по форме, к шарам, цилиндрам и пластинкам (плоским и профилированным).
Сопротивление деталей орудий лова, имеющих форму шара.
Форму шара имеют, например, такие детали оснастки орудий лова, как траловые кухтыли и бобинцы, дрифтерные буи. Зависимость Cx=f(Re) для шара показана в приложении 3.
Число Re подсчитывается из соотношения
 (1.2)
(1.2)
где d — диаметр шара, м; n — коэффициент кинематической вязкости воды, м2/с.
Данные о коэффициентах кинематической вязкости морской воды в зависимости от температуры и солености приведены в приложении 2.
Вопросы для самоконтроля
1. какие элементы орудий лова имеют форму простых фигур.
2. Каков порядок расчета сопротивления шара, цилиндра, пластины?
3. Порядок расчета и основный формулы для определения сопротивления плоской сети.
4. Алгоритм расчета сопротивления конусной сети.
 Тема СИЛЫ ТЯЖЕСТИ И ТРЕНИЯ; УСИЛИЯ, РАЗВИВАЕМЫЕ РЫБОЙ
Тема СИЛЫ ТЯЖЕСТИ И ТРЕНИЯ; УСИЛИЯ, РАЗВИВАЕМЫЕ РЫБОЙ
Силы тяжести. Результирующая сил тяжести Р, действующая на орудие лова и его детали, направлена вертикально вниз. Результирующая гидростатических (архимедовых) сил D направлена вертикально вверх. Значения Р и D определяются по формулам:
P=gV, D=gBV (2.1)
где V — объем тела, м3; g — объемный вес тела, Н/м3; gB — объемный вес воды, Н/м3.
Вес тела в воде Q представляет собой равнодействующую сил Р и D, если последние находятся на одной вертикали, вычисляется по формуле
 или
или  (2.2)
(2.2)
где r — плотность материала детали, кг/м3; rв — плотность воды, кг/м3.
Для сетеснастных материалов, поверхность которых имеет пористую структуру, следует отличать истинный объем изделия Vист и его внешний объем VBH. Сила тяжести таких изделий (ниток, веревок, канатов, сетей) может быть определена выражениями
Р = g Vист; Р = g ФVВН, (2.3)
где g Ф — фиктивный объемный вес изделия, Н/м3, а гидростатическая сила — из
D=yB Vист. (2.4)
Объемный вес материала ниток, канатов и сетей после предварительного экспериментального определения сил PhD вычисляется по формуле
 (2.5)
(2.5)
Объемный вес сетематериалов и их плотность r связаны:
g=rg, (2.6)
где g — ускорение силы тяжести, м/с2.
Средний объемный вес в воде g * ниток и канатов определяется из
 (2.7)
(2.7)
 (2.8)
(2.8)
Силы трения. Сила трения при движении деталей оснастки по грунту (например, грунтропа) определяется выражением
F=Nf=Gf (2.9)
где N —реакция грунта; G — вес грузила в воде; f — коэффициент трения.
Держащая сила балласта на канатной оттяжке рассчитывается по формуле
 (2.10)
(2.10)
Держащая сила якорей определяется из выражения
F=kG (2.11)
где G — вес якоря; k — опытный коэффициент.
Усилия, развиваемые рыбой. Статическое усилие R0, развиваемое рыбой, рассчитывается по формуле
Ro=koPL-1/3. (2.12)
Максимальное динамическое усилие R, развиваемой рыбой, находится из выражения
 (2.13)
(2.13)
Необходимая величина упругого перемещения снасти для условия, при котором динамическое усилие, развиваемое рыбой, не должно превышать собственного ее веса, определяется соотношением
 (2.14)
(2.14)
Вес рыбы в воде РВ связан с весом ее в воздухе. Р соотношением
РВ= (0,01-0,02) Р. (2.15)
Вертикальная потопляющая сила РП, создаваемая попавшей в орудие лова рыбой, приближенно оценивается выражением
PП = 0,07Р, (2.16)
где РП — потопляющая сила, создаваемая уловом.
Литература: [1], стр. 50-59
Пояснение по решению задач.
Задача 2.4 [2]
1. Сила плавучести рассчитывается по формуле 2.2
Для этого определяем плотность воды r=f(S,t) по приложению 1 [2]
Задача 2.8[2]
 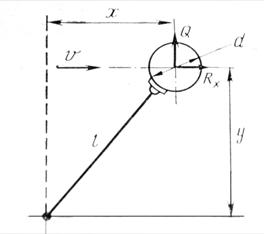 Рис. 2
Рис. 2
| Положение кухтыля (Рис. 2) определяется углом a, который можно определить из соотношений сил RX и Q: tg a= RX / Q
Сила плавучести рассчитывается по формуле 2.2 [2]. Для определения плотности шара необходимо найти его объём V=  .
RX рассчитывается по формуле 1.1
Для этого пределяем число Re по формуле1.2, и СХ= f(Re) по приложению 3 [2] .
RX рассчитывается по формуле 1.1
Для этого пределяем число Re по формуле1.2, и СХ= f(Re) по приложению 3 [2]
|
Задача 2.19[2]
Сила тяжести сети в воде определяется по формуле 2.2
плотность воды r=f(S,t) определяем по приложению 1 [2]
плотность материала сети определяем по приложению 14 [2]
2.62
|
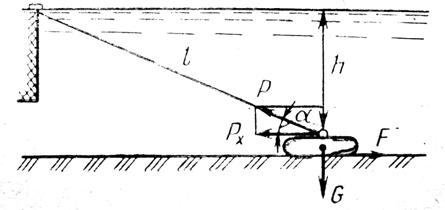
Рис. 3
|
Масса груза G рассчитывается из формулы 2.10. В соответствии со схемой (Рис. 3), сила F должна быть не менее силы РХ – горизонтальной составляющей натяжения оттяжки. Для расчета РХ необходимо знать угол, который определяется из треугольника с катетом h и гипотенузой l.
Вопросы для самоконтроля
1. Как определить вес объекта в воде?
2. Как рассчитываются силы воздействия рыбы на орудие лова?
3. Что такое держащая сила якорей?
4. Как определить держащую силу балласта и грузил?
Содержательный модуль:
Механика гибкой нити.
Вопросы для самоконтроля
1. Как определяются усилия в нитях, нагруженных сосредоточенными силами.
2. В каких случаях нить нагруженная распределённой силой принимает форму тяжелой нити? Как определить её форму и натяжение?
3. В каких случаях нить нагруженная распределённой силой принимает форму параболы? Как определить её форму и натяжение?
4. Опишите метод определения натяжения в ваере.
Тема 



 ГРАФОСТАТИЧЕСКИЙ РАСЧЕТ ФОРМЫ И НАТЯЖЕНИЯ ГИБКИХ НИТЕЙ, КАНАТОВ И СЕТЕЙ
ГРАФОСТАТИЧЕСКИЙ РАСЧЕТ ФОРМЫ И НАТЯЖЕНИЯ ГИБКИХ НИТЕЙ, КАНАТОВ И СЕТЕЙ
Форма и натяжение гибкой нити под действием одной сосредоточенной внешней силы. Если к гибкой нерастяжимой и невесомой нити, закрепленной в двух точках, приложена внешняя сила R, величина и направление которой известны, а точка приложения неподвижна (закреплена) то натяжение в ветвях нити находится графическим построением.
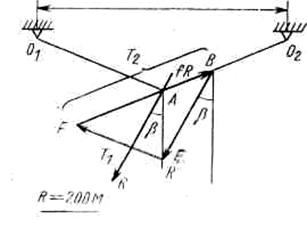
Пример 1. Канат 01А02 длиной 10,8 м закреплен в двух точках, находящихся на одном уровне на расстоянии 10 м (рис. 8). В центре каната висит кольцо А, к которому приложена сила R, равная 200 Н. Коэффициент трения кольца по канату f=0,5. Определить, при каком угле b между направлением силы R и вертикалью кольцо начнет скользить по канату. Найти величину сил натяжения в ветвях каната.
Решение. Для изображения каната на чертеже (рис. 34) выберем линейный масштаб, равный 0,01. В этом масштабе отложим заданное расстояние между точками закрепления нити O1и О 2. Из полученных точек раствором циркуля, равным в масштабе 5,4 м, сделаем засечки, определив тем самым положение кольца А. Точку А соединим с точками О1и О2. Выберем масштаб сил, приняв силу R равной отрезку CD.
Рис. 8
Натяжение в ветвях нити отличается на величину силы трения, т. е.
На линии действия силы Т2 (АО2) от точки А отложим величину силы трения, равную 100 Н. Из точки В раствором циркуля, равным R, сделаем засечку на вертикали. Из полученной точки Е проводим луч, параллельный отрезку АО1 до пересечения с продолжением отрезка О2А. Треугольник AFE по построению равнобедренный, в котором AF = FE = T1. Тогда очевидно, что в полученном силовом треугольнике FBE имеем: FB = T2 и BE = R. Угол b непосредственно снимается с чертежа и равен 30°. Таким образом, при b ≤30° кольцо останется в покое, при b>30° оно начнет перемещаться по канату влево. Для определения натяжений в ветвях каната измерим отрезки EF и FB.
С учетом принятого силового масштаба получим: T1 = 180 Н и T2=280Н.
Форма и натяжение гибкой нити под действием нескольких сосредоточенных или распределенных сил. Когда кгибкой нерастяжимой и невесомой нити приложено несколько сосредоточенных сил, точки приложения которых закреплены, то ее форма и натяжение в ветвях находятся путем построения силового и веревочного многоугольника. К такой категории задач относится, например, определение формы и натяжения секции, хребтины яруса, находящейся под воздействием нескольких попавших на крючок рыб.
Пример 2. Судно стоит на якоре, отдав 100 м цепного каната, сила веса в воде 1 м которого равна 100 Н (рис. 9). Ветровое сопротивление судна составляет 8000 Н. Глубина места стоянки судна на якоре равна 60 м. Определить форму каната, натяжения в верхнем и нижнем его концах и их горизонтальные и вертикальные составляющие.
Решение. Назначим силовой масштаб, в соответствии с которым отрезок АВ равен 1000 Н (рис. 10). Направление силы ветрового сопротивления судна R горизонтально, поэтому на горизонтальной линии отложим отрезок Рс, равный в масштабе 800 Н. Вес цепного каната в воде составит
G = 100·100=10 000 H.
Направление силы G вертикально, поэтому из точки с восстановим перпендикуляр и на нем отложим отрезок сО, равный в масштабе 10 000 Н. Силы натяжения на концах цепного каната нам неизвестны, поэтому отсутствуют основания для однозначного выбора полюса. Вместе с тем задана длина цепного каната, что позволяет получить единственное решение путем осуществления последовательных приближений.
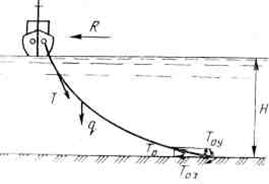 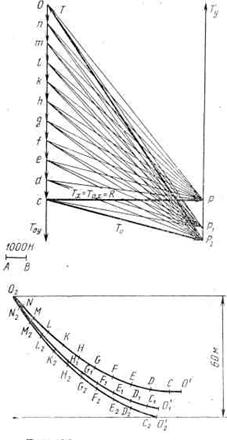 Рис.9 Рис.10
Рис.9 Рис.10
| |
| |
В первом приближении примем, что направление усилия в нижней точке каната горизонтально, и назначим полюсом точку Р. Соединив ее с точкой О, получим силовой треугольник РОс. Примем линейный масштаб равным 0,001. Цепной канат разделим на 10 равных частей по 10 м каждая. Вес участка каната в воде составит 1000 Н. В соответствии с этим разделим отрезок Ос также на 10 частей. Получим отрезки On, nm, ml,...,dc, представляющие собой силы веса участков каната в воде. Соединим точки п, т,..., d с полюсом Р прямыми линиями. Полученные отрезки определяют по величине и направлению усилия в соответствующих участках цепного каната.
Из точки O2 (рис. 10) проведем луч, параллельный отрезку РО, и отложим на нем половину участка каната, так как первая ветвь веревочного многоугольника ограничивается линией действия результирующей сил веса первого участка каната, проходящей через его центр. Из полученной точки N проводим луч, паралтельный отрезку Рп, на котором откладываем в масштабе полную длину участка каната 10 м, равную расстоянию между 1-й и 2-й результирующей сил веса на участках. Из полученной точки М проводим луч, параллельный отрезку Рт, на котором также откладываем 10-метровую длину участка каната. Таким образом, продолжаем построение, последовательно получая точки L, К, Н,..., С. Из точки С проводим луч, параллельный отрезку Рс, на котором откладываем половину последнего участка, равную 5 м. Таким образом, ломаная О2NML... O′, определяющая в первом приближении форму каната, по построению равна его длине, т. е. 100 м. Однако ордината точки О', как видно из рис. 36, меньше заданной глубины 60 м. Это свидетельствует о необходимости изменить положение полюса, причем следует обеспечить выполнение двух условий: горизонтальная составляющая R натяжения в нижней точке каната должна остаться прежней и равной 8000 Н, для достижения глубины 60 м ветви веревочного многоугольника должны быть расположены более круто. Учитывая сказанное, переносим полюс по вертикали вниз в точку Р1. Строим силовой треугольник во втором приближении, для чего точку P1 соединяем с точками О, п, т,..., с. Далее во втором приближении осуществляем построение веревочного многоугольника, выполняя те же операции, что и в предыдущем случае. Получаем ломаную О2N1M1L1... О′ 1, равную в масштабе 100 м. Как и ранее, ордината точки О1 не равна 60, что говорит о необходимости продолжить приближения.
В третьем приближении переносим полюс по вертикали вниз в точку Р2 и соединяем ее с точками О, п, т,..., с. Осуществляем построение веревочного многоугольника ON2M2... О′2. Как видим, ордината точки О′2 равна 60 м, что и требовалось по условию задачи.
Таким образом, форма цепного каната соответствует кривой, вписанной в ломаную O2N2M2L2... О′2. Натяжение в верхней точке цепного каната определяется отрезком Р2О. Измерив его и учтя масштаб сил, получим Т=14,3 кН. Горизонтальная составляющая этой силы равна R, т. е. 8 кН. Вертикальная составляющая ТY снимается с чертежа на рис. 10 и равна 12 кН. Сила натяжения нижнего конца каната определяется отрезком Р2с. Получаем T0 = 8,2 кН. Горизонтальная составляющая Т0х также равна R, т. е. 8 кН. Вертикальная составляющая Т0Y, стремящаяся оторвать якорь от грунта, определяется отрезком Р2Р. Получаем Т0Y = 2кН.
Пример 3. Ставная сеть установлена на грунте в водоеме глубиной 5 м. Нижняя подбора закреплена на дне балластом. Верхняя удерживается на поверхности силой плавучести оснастки верхней подборы и наклонной оттяжкой (рис. 11). Пренебрегая влиянием натяжения в наклонной оттяжке, определить потребную высоту сети для обеспечения ей симметричной формы. Гидродинамическое сопротивление сети на 1 м ее длины R в результате воздействия течения составляет 100 Н, сила плавучести оснастки верхней подборы (на 1 м длины) Q = 40 H.
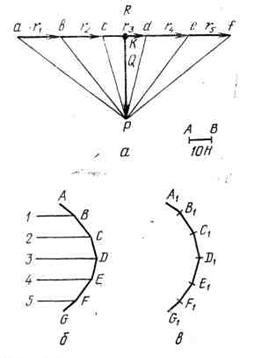 Решение. Допустим, что отрезок АВ соответствует силе 10 Н (рис. 12, а). Будем полагать, что сила гидродинамического давления воды, воздействующая на полоску сети шириной 1 м, равномерно распределена по ее хорде и направлена ей перпендикулярно (как это показано на рис. 11). Разобьем хорду длиной 5 м на пять равных частей и к центру каждой из них приложим результирующую распределенной нагрузки, равную 20 Н.
Решение. Допустим, что отрезок АВ соответствует силе 10 Н (рис. 12, а). Будем полагать, что сила гидродинамического давления воды, воздействующая на полоску сети шириной 1 м, равномерно распределена по ее хорде и направлена ей перпендикулярно (как это показано на рис. 11). Разобьем хорду длиной 5 м на пять равных частей и к центру каждой из них приложим результирующую распределенной нагрузки, равную 20 Н.
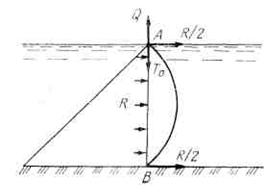
Рис. 11 Рис.12
Строим силовой треугольник (рис. 12). Для этого из точки а последовательно откладываем по одной прямой (так как мы приняли, что на полоску сети действует система параллельных сил) результирующие сил гидродинамического давления воды на участки хорды П, г2у г3, г4, г5. Отрезок af определяет полное давление воды R на сеть. Для определения полюса воспользуемся следующими соображениями. Так как форма полоски должна быть симметрична, то следует полагать, что в точках закрепления полоски А и В (см. рис. 11) приложены силы R/2. Из условия равновесия узла А следует, что топящая сила Т0 равна силе плавучести Q. Поэтому из центра отрезка af (точка К на рис. 12, а) восстанавливаем перпендикуляр, на котором откладываем величину Q. Получаем положение полюса Р. Соединяем точку Р с точками а, Ъ, с, d, e, f. Отрезки Ра и Pf силового треугольника определяют величину и направление реакций в точках закрепления полоски, отрезки Pb, Pc, Pd и Ре — натяжения в соответствующих участках сети.
Для построения веревочного многоугольника выберем линейный масштаб равным 0,01. Пятиметровый отрезок AG разделим на пять равных частей и через центр каждой проведем линии действия сил rif i=l, 2, 3, 4, 5 (рис. 12, б). Из точки А проведем луч, параллельный отрезку Ра, до пересечения с линией действия силы гь Из полученной точки В проведем луч, параллельный отрезку РЬ силового треугольника, до пересечения с линией действия силы г2 и т. д. до получения формы полоски сети в виде ломаной ABCDEFG. Измерив длину этой ломаной и учтя линейный масштаб, получим, что потребная высота сети должна быть равна 6 м.
Если бы в условиях задачи была задана не глубина водоема, перекрываемая сетью, а ее высота, то для определения формы сети построение веревочного многоугольника необходимо осуществить следующим образом (рис. 12, в). Разделим заданную высоту на пять равных частей. Из точки А\ проведем луч, параллельный отрезку Ра силового треугольника, и на нем отложим половину длины участка сети. Из полученной точки В\ проведем луч, параллельный отрезку РЬ, и на нем отложим длину участка и т. д. до получения формы полоски сети в виде ломаной AXBXCXDXEXFXGX. Тогда отрезок AXQX определит (в масштабе) часть глубины водоема, которую перекроет сеть заданной высоты.
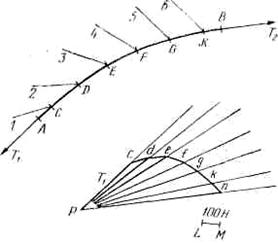 Пример 4. Канат длиной 60 м буксируют по дну за один конец. В некоторый момент времени он принял форму, показанную на рис. 13 в виде кривой АВ. Вес 1 м каната в воде 20 Н, коэффициент трения каната по грунту 0,5. К левому концу каната (точка А) приложена нагрузка, равная 400 Н. Пренебрегая гидродинамическим сопротивлением каната в воде,.определить буксировочное усилие, приложенное в точке В, и направление внешних сил, под действием которых он принял указанную форму.
Пример 4. Канат длиной 60 м буксируют по дну за один конец. В некоторый момент времени он принял форму, показанную на рис. 13 в виде кривой АВ. Вес 1 м каната в воде 20 Н, коэффициент трения каната по грунту 0,5. К левому концу каната (точка А) приложена нагрузка, равная 400 Н. Пренебрегая гидродинамическим сопротивлением каната в воде,.определить буксировочное усилие, приложенное в точке В, и направление внешних сил, под действием которых он принял указанную форму.
Рис. 13
Решение. Разобьем канат на шесть равных частей. Отметим центр каждой части точками С, D, E, F, G, К. Будем считать, что в этих точках приложены равнодействующие внешних сил, распределенных по длине участков. Заменим кривую АВ ломаной ACDEFGKB.
Так как гидродинамическим сопротивлением каната по условию задачи можно пренебречь, то внешними силами являются силы трения. На каждый участок каната действует сила трения, равная 20-10-0,5= 100 Н. Примем, что отрезок LM на рис. 13 соответствует 100 Н. Из произвольного полюса Р проведем пучок лучей, каждый из которых параллелен соответственно отрезкам ACf CD, DE, EF, FG, GK и КВ. На первом луче в принятом силовом масштабе отложим силу 400 Н, приложенную к точке А. Из полученной точки с раствором циркуля, равным отрезку LM (величина силы трения, приложенная к каждому участку каната), делаем засечку на соседнем луче и получаем точку d. Из последней тем же раствором циркуля делаем засечку на следующем луче, получая точку е. Таким образом продолжаем построение, отмечая точки f, g, k и п и соединяя их прямыми линиями. Отрезок Рп характеризует величину и направление искомой силы Т2, приложенной к концу каната В. Измерив отрезок Рп и учтя масштаб, получим Т2 = 820 Н. Отрезки Pd, Pe, Pf, Pg, Pk характеризуют величину и направление соответствующих участков каната. Для определения направления результирующих сил трения, действующих на каждый участок каната, из точек С, D, E, Ff G, К проведем лучи, параллельные отрезкам соответственно cd, de, ef, fg, gk, kn. Эти лучи, отмеченные на рис. 13 цифрами 1, 2,..., 6, показывают направление системы внешних сил, под действием которых канат принял форму ломаной ACDEFGKB.
Подобными построениями, например, может быть определена форма урезов донного невода в процессе их выборки (или буксировки невода).
Вопросы для самоконтроля
1.Опишите порядок построения формы цепной линии.
2.Опишите порядок построения формы сети нагруженной силой сопротивления.
3.Опишите порядок построения формы уреза, буксируемого по грунту.\
Литература: [1], стр. 69-75.
Геометрия рыболовных сетей.
| Форма ячеи натянутой сети определяется посадочными коэффициентами.
Посадочным коэффициентом называют соотношение длины каната L, на которую сажается сеть, и длины сажаемой сетной кромки в жгуте L0.
uX=L/L0 (5.1)
Аналогично по боковой кромке:uY=H/H0 (5.2)
Посадочные коэффициенты связаны между собой зависимостью:
uX2+ uY2=1(5.3)
| 
|
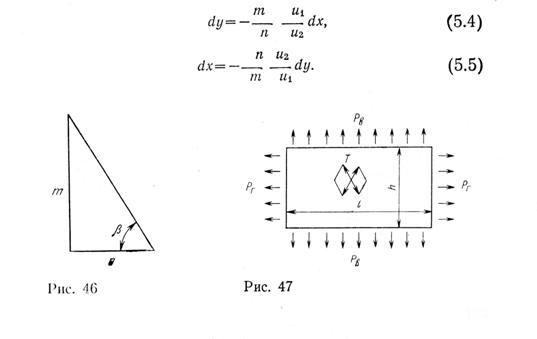
При линейных деформациях прямоугольной сети связь между приращениями высоты и длины сети, вызванными линейными деформациями, имеет вид.
Если прямоугольная сеть посажена с разными посадочными коэффициентами по верхней и нижней подборам, то она примет форму части кругового кольца, а ее высота определяется по формуле
 (5.6)
(5.6)
Коэффициент посадки иХ соответствующий заданной углом b форме клиновидной сети (рис. 46), рассчитывается по формуле
 (5.7)
(5.7)
Статика плоской рыболовной сети. Если к горизонтальным кромкам плоской прямоугольной сети приложены вертикальные растягивающие нагрузки РВ (рис. 47), то для того чтобы сеть сохранила форму прямоугольника, к ее вертикальным кромкам должны быть приложены соответствующие по величине горизонтальные растягивающие усилия Рг. Связь между вертикальными и горизонтальными усилиями имеет вид
 (5.8)
(5.8)
Растягивающая нагрузка, приходящаяся на единицу длины кромки сети, называется напряжением и обозначается
s1=РГ/h= s1= РB/1. (5.9)
Напряжения связаны между собой выражением
 (5.9а)
(5.9а)
Под действием нагрузок, приложенных к кромкам сети, в ее нитях возникают натяжения Г, вычисляемые по формулам:
T=sy·a·tga, (5.10)
T = sx·a·ctga. (5.11)
Если помимо нагрузок по горизонтальным и вертикальным кромкам сети в ее плоскости действуют равномерно распределенные силы q (сила тяжести или гидродинамического сопротивления), то напряжения в каждой точке сети определяются по формулам:
s2=qy+s20 (5.12)
s1=(qy+s20)tg2 a. (5.13)
Такая сеть находится всиловом поле s2 и s1. Линии уровня у = const совпадают в рассматриваемом случае с горизонтальными диагоналями ячей, а градиент поля — с вертикальными диагоналями (х= const).
Литература: [1], стр. 75-92.
Пояснение по решению задач.
Задача 5.5
Приращение высоты сети определяется по формуле 5.4
Задача 5.6
Задача решается по формулам 5.4, 5.5
Задача 5.7
Задача решается по формуле 5.6
Задача 5.17
Задача решается по формуле 5.7
Задача 5.19
Задача решается по формулам 5.9- 5.11,учитывая, что uX=sin(a) и uY=cos(a).
Вопросы для самоконтроля
1. Какую форму принимает сетное полотно, посаженое с разными коэффициентами по верхней и нижней подборе?
2. Какова зависимость между горизонтальным и вертикальным посадочными коэффициентами?
3. Как определяется натяжение в сети при её линейной деформации?
Содержательный модуль:
Задача № 2
Дано: тип судна БМРТ типа «Прометей»;  = 95 %; Ne ГД НОМ = 2850 квт; N ВГ = 150 кВА; ηВГ = 0,95; V ТР = 5,7 узл.
= 95 %; Ne ГД НОМ = 2850 квт; N ВГ = 150 кВА; ηВГ = 0,95; V ТР = 5,7 узл.
Определить: тягу нового судна РРН.
Задача № 3
Дано: тип судна РКТС пр. А488 типа “Моонзунд”; = 95 %; Ne ГД НОМ = 5300 квт; NВГ = 1000 кВА; ηВГ = 0,95; V ТР = 6,0 узл.
Определить: тягу нового судна РРН.
Задача № 4
Дано: 1) тип судна БМРТ типа «Прометей»; 2) режим свободного хода: VСХ = 13 узл. при  ГД = 95 %; NeГД НОМ = 2850 квт; NВГ = 0 кВА; 3) Режим работы ГД на винт при нулевом упоре: V = 0 узл, ГД = 25 %, NВГ = 0 кВА; η ВГ = 0,97; ρВ = 1040 кг/м3; К2 = 0,007, n C = 3.567 1/c, D = 2.9 м, ηВП = 0,97;
ГД = 95 %; NeГД НОМ = 2850 квт; NВГ = 0 кВА; 3) Режим работы ГД на винт при нулевом упоре: V = 0 узл, ГД = 25 %, NВГ = 0 кВА; η ВГ = 0,97; ρВ = 1040 кг/м3; К2 = 0,007, n C = 3.567 1/c, D = 2.9 м, ηВП = 0,97;
Определить: фактическую тягу траулера на скорости траления VТР = 5,7 узла при ГД = 90 %; NВГ = 150 кВА; ηВГ = 0,95.
Содержательный модуль:
Вопросы для самоконтроля
1. Охарактеризуйте условия статического, динамического и кинематического подобия.
2. Перечислите основные критерии подобия.
3. Методика расчетов масштабов подобия в условиях недостаточности основных уравнений связи масштабов.
9. Перечень литературы
1. Фридман А.А. «Теория и проектирование орудий промышленного рыболовства». –М.: Легкая и пищевая промышленность. 1981, 328 с.
2. Фридман А.А., Розенштейн М.М. Сборник задач и упражнений по теории и проектированию орудий промышленного рыболовства. –М.: Агропромиздат. 1987, 256с.
3. Кадильников Ю.В. «Вероятно-статистическая теория рыболовных систем и технической доступности для них водных биологических ресурсов». – Калининград: АтлантНИРО. 2001, 275с.
4. Веденеев В.Л. Методические указания по решению задач на тему – тяговые характеристики судов. – Керчь. КМТИ. 2003, –9 с.
5. Веденеев В.Л. Методические указания по выполнению РГР по дисциплине «Механика орудий лова» для студентов специальности 7.100301.11. – Керчь. КМТИ, 2003, 15 с.
© Савотин Дмитрий Вячеславович
Методические указания
к самостоятельной работе студента по дисциплине
«Механика орудий лова»
для студентов направления 6.070104 «Морской и речной транспорт»
специализации «Судовождение и промышленное рыболовство»
Форма обучения - дневная
Тираж __________ экз. Подписано к печати ______________________.
Заказ № _____________. Объем __ 1,38 __п.л.
Изд-во «Керченский государственный морской технологический университет»
98309 г. Керчь, Орджоникидзе, 82.
Методические указания
по самостоятельной работе
для студентов направления 6.070104 «Морской и речной транспорт»
специализации «Судовождение и промышленное рыболовство»
Форма обучения - дневная
Курс – 3
Керчь 2010
Введение
Настоящие методические указания предназначены в помощь студенту при самостоятельном изучении дисциплины «Механика орудий лова», содержат наиболее важный теоретический материал в лаконичном изложении и практические задания с алгоритмами их решения.
Целью изучения дисциплины «Механика орудий лова» является получение студентами знаний об особенностях применения законов обтекания жидкостями, применительно к орудиям лова. Эти знания являются базой для дисциплины «Основы проектирования и конструирования орудий лова».
Задачей дисциплины является изучение гидродинамических сил и формы орудий лова и закрепление этих знаний практическими навыками.
В процессе изучения дисциплины, студент должен прочесть теоретический материал, при необходимости обращаясь к литературным источникам, приведенным в конце каждой темы. После изучения теории, необходимо решить задачи, которые также приводятся в конце темы. Задачи по всем темам, кроме расчета располагаемой тяги судна, приведены из одного источника – [2]. В случае, когда в условии имеются варианты исходных данных, студент выбирает свой вариант по последней цифре в зачетке.
В результате изучения курса механики орудий лова, студент должен:
ЗНАТЬ
– природу внешних сил, действующих на орудия лова;
– механику гибкой нити;
– механику регулярной и нерегулярной сети (плоской и пространственной);
– механику отдельных важнейших орудий лова;
– основы теории физического моделирования орудий лова.
УМЕТЬ:
– рассчитывать внешние силы, действующие на орудия лова;
– составлять расчетные схемы орудий лова, и решать на их основе задачи о форме орудий лова, об усилиях, возникающих в элементах или деталях орудий лова;
– рассчитывать критерии подобия и на их основе масштабы подобия.
Содержание дисциплины.
| № темы
| Объем (час)
| Наименование тем,
краткое содержание материала
|
| |
|
| Внешние силы, действующие на орудия лова
|
|
|
| Гидростатические силы, силы трения по грунту, усилия, развиваемые рыбой.
Гидродинамические силы сопротивления орудий лова и их деталей. Сопротивление тел стабильной формы: шар, цилиндр, пластина.
|
|
| Гидродинамические силы сопротивления сетей: плоских, перпендикулярных к потоку, параллельных потоку, под любым углом αк потоку, сопротивление объемных сетей.
|
|
| Тяговые характеристики судов
|
| |
|
| Механика гибкой нити
|
|
|
| Аналитический расчет формы и натяжения гибкой нити. Гибкая нить как цепная линия. Гибкая нить как парабола.
|
|
| Графостатический способ расчета гибкой нити.
|
|
| Механика сетей
|
|
|
| Геометрия и статика плоских регулярных сетей.
Геометрия и статика объемных регулярных и нерегулярных сетей.
|
|
| Механика основных орудий лова
|
|
|
| Механика трала. Расчетные схемы в трех плоскостях пространства. Задачи, решаемые с помощью расчетных схем: горизонт хода трала, вертикальное раскрытие трала, горизонтальное раскрытие трала, усилия в деталях трала.
|
|
| Механика кошельковых неводов. Расчетные схемы д |