Электро- радиотехнические измерения
АНАЛОГОВЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
Общие сведения
В аналоговых электромеханических измерительных приборах непосредственной оценки электромагнитная энергия, подведенная к прибору непосредственно из измеряемой цепи, преобразуется в механическую энергию углового перемещения подвижной части относительно неподвижной.
Электромеханические измерительные приборы (ЭИП) применяют для измерения тока, напряжения, мощности, сопротивлений и других электрических величин на постоянном и переменном токах преимущественно промышленной частоты 50 Гц. Эти приборы относят к приборам прямого действия. Они состоят из электрического преобразователя (измерительной цепи), электромеханического преобразователя (измерительного механизма), отсчетного устройства (рис. 5.1).

Рис. 5.1. Структурная схема аналогового ЭИП
Измерительная цепь. Она обеспечивает преобразование электрической измеряемой величины X в некоторую промежуточную электрическую величину Y (ток или напряжение), функционально связанную с измеряемой величиной X. Величина Y непосредственно воздействует на измерительный механизм (ИМ).
По характеру преобразования измерительная цепь может представлять собой совокупность элементов (резисторов, конденсаторов, выпрямителей, термопар и др.). Различные измерительные цепи позволяют использовать один и тот же ИМ при измерениях разнородных величин, напряжения, тока, сопротивления, меняющихся в широких пределах.
Измерительный механизм. Являясь основной частью конструкции прибора, он преобразует электромагнитную энергию в механическую энергию, необходимую для угла отклонения а его подвижной части относительно неподвижной, т. е.
α = f(Y) = F(X).
Подвижная часть ИМ представляет собой механическую систему с одной степенью свободы относительно оси вращения. Момент количества движения равен сумме моментов, действующих на подвижную часть.
Дифференциальное уравнение моментов, описывающее работу ИМ, имеет вид
J(d 2α/ dt 2) = Σ M, (5.1)
где J — момент инерции подвижной части ИМ; α — угол отклонения подвижной части; d 2α/ dt 2 — угловое ускорение.
На подвижную часть ИМ при ее движении воздействуют:
вращающий момент М, определяемый для всех ЭИП скоростью изменения энергии электромагнитного поля wэ, сосредоточенной в механизме, по углу отклонения α подвижной части. Вращающий момент является некоторой функцией измеряемой величины X, а следовательно, Y (тока, напряжения, произведения токов) и α:
М = (∂wэ/∂α) = f (α) Yn, (5.2)
где n=1, 2;
противодействующий момент Мα, создаваемый механическим путем с помощью спиральных пружин, растяжек, подводящих проводов и пропорциональный углу отклонения α подвижной части:
Мα = — W α, (5,3)
где W — удельный противодействующий момент на единицу угла закручивания пружины (зависит от материала пружины и ее геометрических размеров);
момент успокоения М усп, т. е. момент сил сопротивления движению, всегда направленный навстречу движению и пропорциональный угловой скорости отклонения:
Мусп =— Р (d α/ d t), (5.4)
где Р — коэффициент успокоения (демпфирования).
Подставив (5.2) — (5.4) в (5.1), получим дифференциальное уравнение отклонения подвижной части механизма:
J(d 2α/ dt 2) = М + М α + М усп, (5.5)
или
J(d 2α/ dt 2) + Р (d α/ d t) + W α = M. (5.6)
Установившееся отклонение подвижной части ИМ определяется равенством вращающего и противодействующего моментов, т. е. М = М α, в том случае, если два первых члена левой части дифференциального уравнения (5.6) равны нулю. Подставив в равенство М = М α аналитические выражения моментов, получим уравнение шкалы прибора, показывающее зависимость угла отклонения а подвижной части от значения измеряемой величины и параметров ИМ.
В зависимости от способа преобразования электромагнитной энергии в механическое угловое перемещение подвижной части ИМ электромеханические приборы делят на магнитоэлектрические, электродинамические, ферродинамические, электромагнитные и др.
Отсчетное устройство аналоговых ЭИП. Чаще всего оно состоит из указателя, жестко связанного с подвижной частью ИМ, и неподвижной шкалы. Указатели бывают стрелочные (механические) и световые. Шкала представляет собой совокупность отметок, которые расположены вдоль какой-либо линии и изображают ряд последовательных чисел, соответствующих значениям измеряемой величины. Отметки имеют вид штрихов, черточек, точек и т. п.
По начертанию шкалы бывают прямолинейные (горизонтальные или вертикальные), дуговые (при дуге до 180° включительно) и круговые (при дуге более 180°).
По характеру расположения отметок различают шкалы равномерные и неравномерные, односторонние относительно нуля, двусторонние и безнулевые. Шкалы градуируют либо в единицах измеряемой величины (именованная шкала), либо в делениях (неименованная шкала). Числовое значение измеряемой величины равно произведению числа делений, прочитанных по шкале, на цену (постоянную) прибора. Цена деления— значение измеряемой величины, соответствующее одному делению шкалы.
Так как ЭИП являются приборами прямого действия, то чувствительность прибора Sп определяется чувствительностью цепи Sц и чувствительностью измерительного механизма Sи:
Sп = Sц Sи (5.7)
Классы точности аналоговых ЭИП: 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4,0.
Узлы и детали измерительных приборов. Для большинства ЭИП, несмотря на разнообразие ИМ, можно выделить общие узлы и детали — устройства для установки подвижной части ИМ, для создания противодействующего момента, уравновешивания и успокоения
. 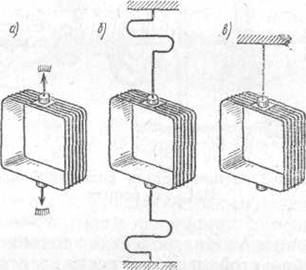
Рис. 5.2. Установка подвижной части измерительного механизма
Так как любой измерительный механизм ЭИП состоит из подвижной и неподвижной частей, то для обеспечения свободного перемещения подвижной части последнюю устанавливают на опорах (рис. 5.2,а), растяжках (рис. 5.2,6), подвесе (рис. 5.2,в). При транспортировке подвижную часть ИМ закрепляют неподвижно с помощью арретира.
Устройства для установки подвижной части на опорах представляют собой легкую алюминиевую трубку, в которую запрессовывают керны (стальные отрезки). Концы кернов затачивают и шлифуют на конус с закруглением. Опираются керны на агатовые или корундовые подпятники. При установке подвижной части ИМ на кернах между керном и подпятником возникает трение, что вносит погрешность в показания прибора. В приборах высокого класса точности (лабораторных) для уменьшения трения шкала устанавливается горизонтально, а ось вертикально. При этом нагрузка сосредоточена в основном на нижней опоре.
Устройства для установки подвижной части на растяжках представляют собой две тонкие ленты из бронзового сплава, на которых подвешивается подвижная часть ИМ.
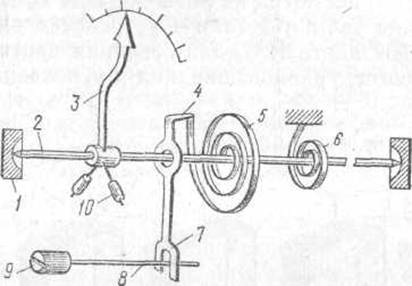
Рис. 5.3. Общие детали подвижной части ИМ на опорах
Их наличие обеспечивает отсутствие трения в опорах, облегчает подвижную систему, повышает виброустойчивость. Растяжки используют для подведения тока к обмотке рамки и создания противодействующего момента.
Устройства для установки подвижной части на подвесах используют в особо чувствительных приборах. Подвижную часть ИМ подвешивают на тонкой металлической (иногда кварцевой) нити. Ток в рамку подвижной части подводят через нить подвеса и специальный безмоментный токоподвод из золота или серебра.
Для создания противодействующего момента в ИМ с установкой подвижной части на опорах (рис. 5.3) используют одну или две плоские спиральные пружины 5 и 6, выполненные из оловянно-цинковой бронзы. Пружины служат также в качестве токоподводов к обмотке рамки подвижной части. Одним концом пружину крепят к оси или полуоси, а другим — к поводку 4 корректора. Корректор, устанавливающий на нуль стрелку 3 невключенного прибора, состоит из винта 9 с эксцентрично расположенным пальцем 8 и вилки 7 с поводком. Винт 9 корректора выводится на переднюю панель корпуса прибора, вращаясь, он движет вилку 7, что вызывает закручивание пружины и соответственно перемещение стрелки 3. Ось 2 заканчивается кернами, опирающимися на подпятники 1.
Для уравновешивания подвижной части служат грузики-противовесы 10.
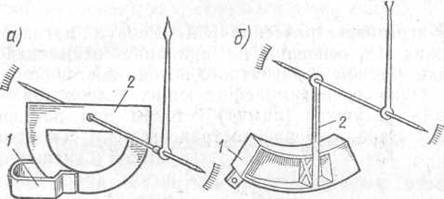
Рис. 5.4. Схемы магнитоиндукционного (а) и воздушного (б) успокоителей
Измерительный механизм считается уравновешенным, когда центр тяжести подвижной части совпадает с осью вращения. Хорошо уравновешенный измерительный механизм показывает при различных положениях одно и то же значение измеряемой величины.
Для создания необходимого успокоения ИМ снабжают успокоителями, развивающими момент, направленный навстречу движению (время успокоения не более 4 с). В ИМ наиболее часто применяют магнитоиндукционные и воздушные успокоители, реже — жидкостные (когда требуется очень большое успокоение).
Магнитоиндукционный успокоитель (рис. 5.4, о) состоит из постоянного магнита 1 и алюминиевого диска 2, жестко связанного с подвижной частью механизма и свободно перемещающегося в поле постоянного магнита. Успокоение создается за счет взаимодействия токов, индуцированных в диске при его перемещении в магнитном поле постоянного магнита с потоком этого же магнита.
Воздушный успокоитель (рис. 5.4, б) представляет собой камеру /, в которой перемещается легкое алюминиевое крыло (или поршенек) 2, жестко связанное с подвижной частью ИМ. При перемещении воздуха из одной части камеры в другую через зазор (между камерой и крылом) тормозится движение крыла и колебания подвижной части быстро затухают. Воздушные успокоители слабее магнитоиндукционных.
Логометры
Логометры — приборы электромеханической группы, измеряющие отношение двух электрических величин Y1 и Y2:
α = F(Y1/ Y2)n, (5.41)
где n — коэффициент, зависящий от системы ИМ.
Особенность логометров заключается в том, что вращающий М и противодействующий Мα моменты в них создаются электрическим путем, поэтому логометр имеет два воспринимающих элемента, на которые воздействуют величины Y1 и Y2, составляющие измеряемое отношение. Направления величин Y1 и Y2 должны выбираться такими, чтобы моменты М и Мα, действующие на подвижную часть, были направлены навстречу друг другу; при этом подвижная часть будет поворачиваться под действием большего момента. Для выполнения этих условий моменты М и Мα должны по-разному зависеть от угла отклонения подвижной части прибора.
Источниками погрешности логометра служат неидентичное выполнение двух воспринимающих элементов, особенно при наличии ферромагнитных материалов; наличие в логометре дополнительных моментов Мдоп (от трения в опорах, безмоментных подводок, неуравновешенности подвижной части). Следовательно,
M = Мα + Мдоп. (5.42)
Присутствие дополнительного момента Мдоп делает показания логометра зависящими от побочных факторов (например, напряжения). Поэтому на шкале логометра указывают рабочий диапазон напряжения, в пределах которого градуировка шкалы справедлива. Верхний предел напряжения определяется максимальной мощностью, выделяемой в цепях логометра, а нижний — Мдоп. Стрелка, не включенного под напряжение логометра, из-за отсутствия механического противодействующего момента занимает безразличное положение.
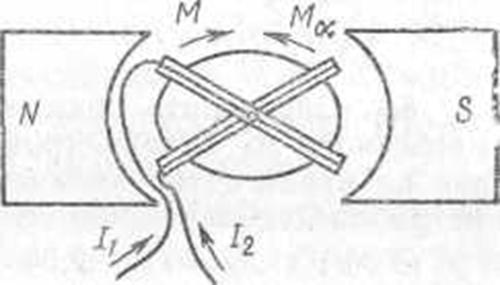
Рис. 5.18. Устройство механизма магнитоэлектрического логометра

Действие магнитоэлектрического логометра заключается в следующем.
В неравномерное магнитное поле постоянного магнита (рис. 5.18) помещают подвижную часть ИМ, содержащую две рамки, жестко скрепленные под углом d = 30°-90° и насаженные на общую ось. Токи I1 и I2 подводят к рамкам с помощью безмоментных токоподводов. Направление токов таково, что ток I1 создает вращающий, а I2 — противодействующий моменты:
M = I1 (∂Ψ1/∂α); Mα = I2(∂Ψ2/∂α), (5.43)
где Ψ1, Ψ2 —потоки, создаваемые магнитом и сцепленные с рамками.
Моменты М и Mα изменяются в зависимости от изменения угла α. Максимальные значения моментов будут сдвинуты на угол d, что позволяет получить на рабочем участке уменьшение М и увеличение Mα. При равновесии I1(∂Ψ1/∂α) = I2(∂Ψ2/∂α), откуда

где f1(α), f2(α) — величины, определяющие скорость изменения потокосцепления.
Из равенства моментов следует, что
α = F(I1/ I2) (5.45)
Если отношение токов выразить через искомую величину X, то
α = F1(X). (5.46)
Существование данной функциональной зависимости возможно при выполнении основного условия работы логометра, т.е. при ∂Ψ1/∂α ≠ ∂Ψ2/∂α, которое обеспечивается при искусственно созданной неравномерности магнитного поля в воздушном зазоре логометра. Магнитоэлектрические логометры применяют для измерения сопротивлений, частоты и неэлектрических величин,
Электро- радиотехнические измерения






