ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ОМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСТЕТ»
МЕХАНИКА
Методические указания к лабораторным работам по физике
ОМСК 2006
Составители
В.Н.Иванов, к.ф.-м.н., Н.В.Бердинская, к.ф.-м.н., В.А.Егорова, Г.П.Иванова, А.М.Ласица, О.В.Лях, В.О.Нижникова, А.Г.Туровец, к.ф.-м.н.
Данные методические указания содержат описание восьми лабораторных работ, выполняемых на модульном лабораторном комплексе. Указание к каждой работе содержит краткие теоретические сведения, необходимые для правильного выполнения лабораторной работы, описание лабораторной установки, порядок выполнения лабораторной работы, правила обработки результатов и контрольные вопросы.
Печатается по решению редакционно-издательского совета ОмТГУ
ЛАБОРАТОРНАЯ РАБОТА 21-1
МАЯТНИК МАКСВЕЛЛА
Цель работы: изучение характера движения маятника Максвелла, определение моментов инерции твёрдых тел.
Приборы и принадлежности: лабораторная установка «Маятник Максвелла», набор колец, электронный блок ФМ 1/1.
Краткая теория
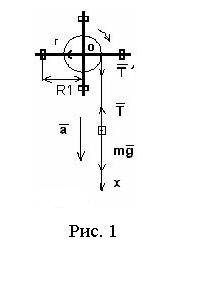
Маятник Максвелла представляет собой стержень радиуса  с насаженным на него однородным массивным диском 1 радиусом
с насаженным на него однородным массивным диском 1 радиусом  , подвешенный бифилярно с помощью нитей 2 к горизонтальной опоре. Нити закреплены на узле фиксации маятника 3 (рис.1).
, подвешенный бифилярно с помощью нитей 2 к горизонтальной опоре. Нити закреплены на узле фиксации маятника 3 (рис.1).
В данной лабораторной работе используется установка, состоящая из вертикальной стойки 4, закреплённой на основании 5, верхнего кронштейна 6, нижнего кронштейна 7 для установки фотодатчика 8 и самого маятника Максвелла. Вертикальная стойка снабжена визиром 9 и миллиметровой шкалой. На верхнем кронштейне 6 размещаются электромагниты 10 и узел фиксации маятника 3.

Рис. 1
Маятник может участвовать в двух движениях: поступательном в вертикальной плоскости и вращательном вокруг своей геометрической оси.
Если, накрутив нити на концы стержня, поднять маятник на некоторую высоту и отпустить его, то предоставленный самому себе маятник начнёт опускаться. При этом его потенциальная энергия будет переходить в кинетическую энергию поступательного и вращательного движения. При движении маятника в крайнем нижнем положении, при котором нити полностью размотаны, маятник будет по инерции вращаться в том же направлении, что и первоначально. Вследствие этого нити начнут наматываться на стержень с другой стороны, маятник будет подниматься, меняя направление поступательного движения.
 Поступательное движение маятника массой m описывается II законом Ньютона:
Поступательное движение маятника массой m описывается II законом Ньютона:
 ,
,
m – масса маятника, a –ускорение, с которым он движется,  - сила натяжения нити.
- сила натяжения нити.
Вращение маятника вызвано моментом сил натяжения нитей:
 ,
,
где - плечо сил (радиус стержня, на который наматываются нити). Это движение подчиняется основному закону динамики вращательного движения
 ,
,
где  – момент инерции маятника, а ε – его угловое ускорение.
– момент инерции маятника, а ε – его угловое ускорение.
Поскольку на маятник действуют две антипараллельные постоянные силы (см. рис.2):  и
и  , он движется с постоянным линейным ускорением. Это ускорение и при движении вниз и при движении вверх одинаково и по модулю и по направлению.
, он движется с постоянным линейным ускорением. Это ускорение и при движении вниз и при движении вверх одинаково и по модулю и по направлению.
Определение момента инерции маятника Максвелла в данной лабораторной работе основано на законе сохранения механической энергии.
Если пренебречь силами сопротивления, то в момент, когда маятник окажется в крайнем нижнем положении, для рассматриваемой системы закон сохранения механической энергии можно записать в виде:
 , (1)
, (1)
где  - потенциальная энергия маятника, поднятого на высоту
- потенциальная энергия маятника, поднятого на высоту  относительно нижней точки (m – масса маятника, g – ускорение свободного падения),
относительно нижней точки (m – масса маятника, g – ускорение свободного падения),  - кинетическая энергия поступательного, а
- кинетическая энергия поступательного, а  - кинетическая энергия вращательного движения маятника.
- кинетическая энергия вращательного движения маятника.
В (1) V и ω – линейная и угловая скорости маятника, равные соответственно:
 , (2)
, (2)
 , (3)
, (3)
где t – время, за которое маятник опустился, пройдя расстояние .
При решении уравнения (1) относительно момента инерции маятника для следует:
 .
.
Подставляя (2) и (3) в данное соотношение, учитывая, что
 ,
,
получаем для момента инерции маятника выражение
 , (4)
, (4)
содержащее параметры, которые можно определить экспериментально.
Порядок выполнения работы
I. Определение момента инерции маятника и характера его движения
Ознакомиться с устройством лабораторной установки.
Замечание В данной лабораторной установке используется блок ФМ 1/1, включающий в себя электронный секундомер. Запуск секундомера осуществляется кнопкой «Пуск», обнуление показаний секундомера происходит при нажатии кнопки «Сброс».
1. Установить с помощью узла регулировки 3 длину подвеса таким образом, чтобы нижний край диска находился на 3 – 4 мм ниже оптической оси фотодатчика (положение оптической оси совпадает с плоскостью нижнего кронштейна, окрашенной в синий цвет (см. рис. 1)). Ось маятника при этом должна занимать горизонтальное положение.
2. По шкале на вертикальной стойке определить положение оси фотодатчика (см. рис.1) и записать отсчёт  .
.
3. Поднять маятник в верхнее положение, аккуратно накручивая нить виток к витку на концы стержня. Высоту подъёма  определить по нижнему краю диска при помощи визира.
определить по нижнему краю диска при помощи визира.
4. Одновременно отпустить маятник и нажать кнопку «Пуск». Занести в табл. 1 показания таймера  и расстояние
и расстояние  , пройденное маятником.
, пройденное маятником.
5. Выполнить действия, указанные в пунктах «3» и «4» ещё 6 раз, варьируя в интервале 5 – 25 см. Вычислить для каждого измерения  . Все данные занести в табл. 1.
. Все данные занести в табл. 1.
6. Вычислить момент инерции маятника  для каждого измерения по формуле (4) (масса маятника
для каждого измерения по формуле (4) (масса маятника  = 119 г, радиус стержня = 0,40 см).
= 119 г, радиус стержня = 0,40 см).
7. Вычислить среднее значение момента инерции маятника, рассчитать абсолютную и относительную погрешности по методу косвенных невоспроизводимых измерений. Записать конечный результат и заполнить табл. 1.
8. По данным таблицы 1 построить график зависимости  . Сделать вывод о характере движения маятника.
. Сделать вывод о характере движения маятника.
Таблица 1
|
| h, м
| t, с
| t2, с2
| JМ, кг м2
| <JМ >, кг м2
| Δ JМ, кг м2
| ε %
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II. Определение момента инерции кольца
1. Записать массу сменного кольца  в таб. 2.
в таб. 2.
2. Насадить кольцо на диск маятника.
3. Вращая маятник по часовой стрелке (см. рис.1), зафиксировать его с помощью кнопки «Сброс» в верхнем положении при помощи левого (ближнего к стойке) электромагнита. При вращении против часовой стрелки фиксировать c помощью правого (дальнего от стойки) электромагнита.
4. С помощью визира определить высоту  , соответствующую положению нижнего края кольца. Нажать кнопку «Пуск». Занести в табл. 2 показания таймера
, соответствующую положению нижнего края кольца. Нажать кнопку «Пуск». Занести в табл. 2 показания таймера  и расстояние
и расстояние  , пройденное маятником.
, пройденное маятником.
5. Не меняя высоты , повторить измерения времени 7 раз.
6. Вычислить по формуле (4) общий момент инерции  маятника и кольца, подставив в нее
маятника и кольца, подставив в нее  ,
,  и
и  .
.
7. Вычислить момент инерции кольца по формуле  .
.
8. Вычислить теоретическое значение момента инерции кольца  по формуле
по формуле
 ,
,
где  =0,048 м – средний радиус кольца,
=0,048 м – средний радиус кольца,  =0,0075 м – толщина кольца.
=0,0075 м – толщина кольца.
9. Оценить погрешность эксперимента по формуле
 ,
,
10. Сделать вывод, обсудив причины расхождения экспериментального и теоретического значений момента инерции кольца.
Таблица 2
| mК, кг
| h1, м
| t1,
с
| <t1>,
с
|  кг м 2
кг м 2
|  кг м 2 кг м 2
|  кг м 2
кг м 2
| ε %
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольные вопросы
1. Закон сохранения механической энергии. Превращение энергии при колебаниях маятника Максвелла.
2. Момент инерции твердого тела.
3. Вывод формулы для экспериментального определения момента инерции маятника.
4. Почему движение маятника можно считать равноускоренным? Как экспериментально проверяется равноускоренный характер движения маятника?
5. Экспериментальное определение момента инерции кольца. Чем объясняется расхождение между экспериментальным и теоретическим значением момента инерции кольца?
ЛАБОРАТОРНАЯ РАБОТА 21-2
МАШИНА АТВУДА
Цель работы: изучение равноускоренного движения, экспериментальная проверка основного закона динамики.
Приборы и принадлежности: лабораторная установка «Машина Атвуда»; электронный блок ФМ 1/1; разновесы и грузы с капроновой нитью.
Краткая теория
В настоящей работе экспериментально проверяются основной закон механики – второй закон Ньютона – и кинематические формулы, описывающие прямолинейное равноускоренное движение тел.
При равноускоренном движении путь, пройденный телом за время ,
 ,
,
откуда при нулевой начальной скорости  ускорение
ускорение
 . (1)
. (1)
Эта формула позволяет найти ускорение, измерив время движения тела и пройденный им путь.
 В соответствии со вторым законом Ньютона, ускорение тела определяется действующей на тело силой
В соответствии со вторым законом Ньютона, ускорение тела определяется действующей на тело силой  и его массой :
и его массой :
 . (2)
. (2)
Пусть к концам нерастяжимой нити, перекинутой через неподвижный блок, прикреплены грузы с массами и  (см. рис.1).
(см. рис.1).
Если пренебречь силами сопротивления, массой нити, а также массой блока (при этом допущении натяжение нити по обе стороны блока можно считать одинаковым:  ), для ускорения грузов справедлива приближенная формула:
), для ускорения грузов справедлива приближенная формула:
 . (3)
. (3)
Более строгое рассмотрение возможно при учете массы блока.
Применяя к грузам, движущимся поступательно, уравнение второго закона Ньютона (2), а к вращающемуся блоку – его следствие, т. е. основной закон динамики вращательного движения, который можно представить в виде соотношения:
 , (4)
, (4)
где  - угловое ускорение блока,
- угловое ускорение блока,  - момент сил, приложенных к нему, и - его момент инерции, для ускорения, с которым двигаются грузы, получим более точное выражение:
- момент сил, приложенных к нему, и - его момент инерции, для ускорения, с которым двигаются грузы, получим более точное выражение:
 , (5)
, (5)
где - плечо момента сил натяжения  и
и  .
.
Поскольку ускорение  известно из кинематических измерений, формулы (3) и (5) можно использовать для экспериментального определения ускорения свободного падения в двух приближениях: без учета массы блока
известно из кинематических измерений, формулы (3) и (5) можно использовать для экспериментального определения ускорения свободного падения в двух приближениях: без учета массы блока
 (6)
(6)
и с ее учетом:
 . (7)
. (7)
Сравнивая полученные значения  и
и  с известным табличным значением ускорения свободного падения для средних широт на уровне моря
с известным табличным значением ускорения свободного падения для средних широт на уровне моря  , можно сделать вывод о результатах экспериментальной проверки основного закона динамики.
, можно сделать вывод о результатах экспериментальной проверки основного закона динамики.
Устройство установки
Машина Атвуда, в ее упрощенном варианте, используемом в данной работе (см. рис. 2), представляет собой укрепленную на основании 1 вертикальную стойку 2 с двумя кронштейнами. На верхнем кронштейне 3 с помощью подшипников размещен легкий шкив 4, через который перекинута капроновая нить с двумя основными грузами и набором разновесов. Ось шкива снабжена электромагнитным тормозом для фиксации начального положения грузов.
 Нижний кронштейн 5 с размещенным на нем фотодатчиком 6 можно установить на нужной высоте и зафиксировать винтом 7. Путь, пройденный грузами, отсчитывается по шкале на стойке 2 с помощью визира 8 и горизонтальной риски на поверхности корпуса фотодатчика.
Нижний кронштейн 5 с размещенным на нем фотодатчиком 6 можно установить на нужной высоте и зафиксировать винтом 7. Путь, пройденный грузами, отсчитывается по шкале на стойке 2 с помощью визира 8 и горизонтальной риски на поверхности корпуса фотодатчика.
Для измерения времени движения грузов и питания электромагнитного тормоза установка оснащена электронным блоком, который включается клавишей «Сеть» на его задней панели.
При нажатии кнопки «Пуск» шкив растормаживается, начинается движение грузов и отсчет времени по таймеру электронного блока. При пересечении правым грузом оптической оси фотодатчика отсчет времени прекращается, и на правом табло таймера высвечивается время движения грузов.
После нажатия «Сброс» вновь включается электромагнитный тормоз, таймер обнуляется, и установка готова к повторным измерениям. В случае отказа автоматической остановки счета времени необходимо нажать кнопку «Стоп».
Порядок выполнения работы
1. Ознакомиться с устройством лабораторной установки «Машина Атвуда».
2. Перекинуть через шкив нить с двумя основными грузами, снабженными крючками, и убедиться, что система находится в состоянии безразличного равновесия. Используя в качестве отвеса нить с грузами, визуально проверить вертикальность стойки 2 установки, в случае необходимости подрегулировать ее положение с помощью регулировочных опор основания.
3. Установить кронштейн 5 с фотодатчиком в нижней части шкалы вертикальной стойки так, чтобы плоскость кронштейна, окрашенная в красный цвет, совпала с одной из рисок шкалы, а правый груз при движении вниз проходил в центре рабочего окна фотодатчика. За нижнее положение груза берется деление шкалы, соответствующее риске на корпусе фотодатчика. Закрепить платформу 9 с демпфером под рабочим окном фотодатчика.
4. Установить правый груз в крайнее верхнее положение и совместить с его нижней плоскостью визир 8. Записать в таблицу путь  , проходимый грузами, как разность отсчетов по шкале от риски корпуса фотодатчика до визира. Убедиться, что разъемы электронного блока подключены к фотодатчику и электромагнитному тормозу, и нажать клавишу «Сеть» блока. При этом должно включиться табло индикации и сработать электромагнит тормоза.
, проходимый грузами, как разность отсчетов по шкале от риски корпуса фотодатчика до визира. Убедиться, что разъемы электронного блока подключены к фотодатчику и электромагнитному тормозу, и нажать клавишу «Сеть» блока. При этом должно включиться табло индикации и сработать электромагнит тормоза.
5. Поместить на левый и правый основные грузы дополнительные разновесы с таким расчетом, чтобы суммарная масса правого груза была больше, чем левого. Записать в таблицу суммарную массу левого груза и массу перегрузка  (разность суммарных масс правого и левого грузов). Масса основных грузов и разновесов в граммах указана на их поверхностях.
(разность суммарных масс правого и левого грузов). Масса основных грузов и разновесов в граммах указана на их поверхностях.
6. Дождаться прекращения колебаний правого груза, убедиться в совпадении визира 8 с нижней поверхностью этого груза и нажать кнопку «Пуск». После остановки таймера записать в таблицу его показания – время движения в секундах.
7. Поднять правый груз в крайнее верхнее положение и нажать кнопку «Сброс». Убедившись в готовности установки, провести измерения в соответствии с пунктом 5 еще два раза.
8. Повторить измерения по пунктам «4»-«6» для других сочетаний масс и  (всего 5 таких сочетаний). Нажатием клавиши «Сеть» выключить установку.
(всего 5 таких сочетаний). Нажатием клавиши «Сеть» выключить установку.
9. Вычислить < > и ускорение  по формуле (1) отдельно для каждого сочетания и .
по формуле (1) отдельно для каждого сочетания и .
10. Вычислить  по формуле (6) для каждого сочетания масс, его среднее значение и абсолютную погрешность (по методике невоспроизводимых косвенных измерений). Данные занести в таблицу.
по формуле (6) для каждого сочетания масс, его среднее значение и абсолютную погрешность (по методике невоспроизводимых косвенных измерений). Данные занести в таблицу.
11. Аналогичные вычисления произвести для  , используя формулу (7) и приняв константу установки
, используя формулу (7) и приняв константу установки  . Внести полученные данные в таблицу.
. Внести полученные данные в таблицу.
12. Сравнить результаты измерения и с табличным значением  и сделать вывод, приняв за точность эксперимента в каждом случае величину
и сделать вывод, приняв за точность эксперимента в каждом случае величину
 .
. 
Таблица
Контрольные вопросы
1. Цель работы. Кинематика поступательного движения. Скорость, ускорение и путь при равноускоренном движении.
2. Кинематика вращения. Угловая скорость и угловое ускорение. Их связь с соответствующими линейными величинами.
3. Второй закон Ньютона. Сила. Масса. Вывод формулы (3).
4. Момент силы. Момент инерции. Основной закон динамики вращения твердого тела. Вывод формулы (5).
5. Описание экспериментальной установки и назначение её отдельных частей.
6. Сравнить экспериментально полученные значения ускорения свободного падения между собой и с табличным значением. Объяснить различия.
ЛАБОРАТОРНАЯ РАБОТА 21-3
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Цель работы: проверка основного закона динамики вращательного движения твердого тела с помощью маятника Обербека.
Приборы и принадлежности: установка лабораторная «Маятник Обербека», электронный блок ФМ 1/1, наборные грузы (разновесы).
Краткая теория
Маятник Обербека предназначен для изучения основного закона динамики вращательного движения твердого тела и экспериментального определения моментов инерции системы тел.
 Маятник, используемый в данной работе, представляет собой маховик с двухступенчатым шкивом, осью вращения, подшипниковой системой и крестовиной из четырех металлических стержней. На стержнях закрепляются четыре цилиндра одинаковой массы на одинаковом расстоянии от оси вращения (маятник с подвешенным к нему на нити грузом условно изображен на рисунке 1).
Маятник, используемый в данной работе, представляет собой маховик с двухступенчатым шкивом, осью вращения, подшипниковой системой и крестовиной из четырех металлических стержней. На стержнях закрепляются четыре цилиндра одинаковой массы на одинаковом расстоянии от оси вращения (маятник с подвешенным к нему на нити грузом условно изображен на рисунке 1).
Вращение такого маятника относительно оси  , проходящей через центр тяжести, может быть описано основным законом динамики вращательного движения твердого тела с постоянным во времени моментом инерции:
, проходящей через центр тяжести, может быть описано основным законом динамики вращательного движения твердого тела с постоянным во времени моментом инерции:

 , (1)
, (1)
где  - результирующий момент сил, вызывающих вращение тела, относительно оси ,
- результирующий момент сил, вызывающих вращение тела, относительно оси ,  – момент инерции твердого тела,
– момент инерции твердого тела,  – проекция вектора углового ускорения на ось вращения .
– проекция вектора углового ускорения на ось вращения .
Вращение маятника вызывается силой натяжения нити  , приложенной к шкиву. Силы трения можно считать пренебрежимо малыми и не учитывать создаваемый ими тормозящий момент. Тогда результирующий момент сил равен моменту силы натяжения .
, приложенной к шкиву. Силы трения можно считать пренебрежимо малыми и не учитывать создаваемый ими тормозящий момент. Тогда результирующий момент сил равен моменту силы натяжения .
Момент силы относительно центра маятника (точка О) определяется выражением:
 .
.
Вектор 
 направлен от нас вдоль оси вращения (см. рис. 1).
направлен от нас вдоль оси вращения (см. рис. 1).
Направим ось вдоль вектора . Тогда момент силы относительно этой оси совпадет с модулем момента силы относительно центра маятника:
 , (2)
, (2)
где - радиус шкива, на который наматывается нить.
Если к маятнику подвесить на нити груз массой и отпустить, то маятник начнет вращаться с угловым ускорением  . При этом направление вектора углового ускорения маятника будет совпадать с направлением вектора .
. При этом направление вектора углового ускорения маятника будет совпадать с направлением вектора .
Тогда
. (3)
Формула (3) позволяет по двум известным величинам определить третью.
Выведем формулы, дающие возможность экспериментально определить и .
По третьему закону Ньютона
 ,
,
где - сила натяжения нити, действующая на груз. Найдем эту силу, исходя из второго закона Ньютона, записанного для груза массы :
 .
.
В проекциях на ось 
 .
.
Подстановка (учитывая равенство  ) полученного выражения в (2) дает
) полученного выражения в (2) дает
 , (4)
, (4)
где – линейное ускорение груза.
При запуске установки груз начинает двигаться из состояния покоя. Если с начальным положением груза связать начало координат оси , то за время груз пройдет расстояние , равное
 ,
,
отсюда
 . (5)
. (5)
Подставляя (5) в (4), получаем для момента силы выражение
 . (6)
. (6)
Если нет проскальзывания нити, то линейное ускорение груза является тангенциальным для точек на ободе шкива. В этом случае угловое ускорение маятника может быть выражено через линейное ускорение груза:
 .
.
Тогда при учете (5)
 . (7)
. (7)
Проверка основного закона динамики вращательного движения с помощью маятника Обербека состоит из двух частей.
I. Проверка прямой пропорциональности углового ускорения маятника результирующему моменту приложенных сил
Если при постоянном моменте инерции маятника изменить массу подвешиваемого к нему груза, то согласно формуле (6), изменится и вращательный момент, действующий на маятник.
В соответствии с основным законом динамики вращательного движения (3) изменение момента силы при  приведет к изменению углового ускорения маятника:
приведет к изменению углового ускорения маятника:
 , (8)
, (8)
 . (9)
. (9)
Следовательно, меняя момент сил, можно проверить соотношение:
 . (10)
. (10)
Основной закон динамики вращательного движения (3) позволяет по известным значениям момента силы и углового ускорения определить момент инерции маятника. При этом для повышения точности в качестве момента инерции маятника целесообразно взять его среднее значение:
 , (11)
, (11)
где
 , (12)
, (12)
 . (13)
. (13)
II. Проверка обратной пропорциональности углового ускорения маятника
моменту его инерции
Если при постоянном моменте силы  изменить момент инерции маятника, то в соответствии с формулой (3) изменится его угловое ускорение:
изменить момент инерции маятника, то в соответствии с формулой (3) изменится его угловое ускорение:
 .
.
Следовательно, если взять в качестве  величину
величину  , то должно выполняться соотношение
, то должно выполняться соотношение
 . (14)
. (14)
Момент инерции маятника в работе можно изменить путем симметричного перемещения цилиндров вдоль стержней. Тогда
 , (15)
, (15)
где  - момент инерции маятника в случае, когда расстояние от центра каждого цилиндра до оси вращения равно
- момент инерции маятника в случае, когда расстояние от центра каждого цилиндра до оси вращения равно  ,
,  - средний момент инерции маятника при первоначальном расстоянии
- средний момент инерции маятника при первоначальном расстоянии  между центрами цилиндров и осью маятника,
между центрами цилиндров и осью маятника,  - масса одного цилиндра.
- масса одного цилиндра.
Примечание: Изменение углового ускорения тел при изменении положения цилиндров на стержнях скажется на значении момента силы. Однако его изменение, как показывает расчет, не превышает погрешности измерения, поэтому можно считать, что момент силы остается постоянным.
Описание установки.
Установка представлена на рисунке 2.

Рис. 2
Установка включает: основание 1, вертикальную стойку 2, верхний кронштейн 3, средний кронштейн 4, кронштейн 5 для установки фотодатчика, фотодатчик 6. Основание 1 снабжено тремя регулируемыми опорами 7 и зажимом 8 для фиксации стойки.
Вертикальная стойка 2 выполнена из металлической трубы, на которую нанесена миллиметровая шкала. По стойке может перемещаться визир 19.
На верхнем кронштейне 3 размещается узел подшипников 9 с малоинерционным шкивом 10 для изменения направления движения капроновой нити 11, на которой подвешен груз 12.
На среднем кронштейне 4 размещены: узел подшипников 13, на оси которого с одной стороны закреплен двухступенчатый шкив 14, на котором имеется приспособление для закрепления капроновой нити 11, а с другой стороны находится крестовина, представляющая собой четыре металлических стержня 15, закрепленных в бобышке 16 под прямым углом друг к другу; электромагнитный тормоз 17.
На металлических стержнях 15 через каждые 10 мм нанесены риски.
Грузы 18 закреплены на металлических стержнях 15 и могут свободно перемещаться и фиксироваться на каждом стержне, что дает возможность ступенчатого изменения момента инерции крестовины.
Электромагнитный тормоз 17 предназначен для фиксации подвижной системы в начале эксперимента, выдачи электрического сигнала начала отчета времени и торможения подвижной системы после завершения отчета времени.
Кронштейн 5 имеет зажим для крепления на вертикальной стойке 2 и элементы фиксации фотодатчика.
Установка работает от электронного блока ФМ 1/1.
Порядок выполнения работы
Ознакомиться с устройством лабораторной установки.
Внимание! Перед началом работы необходимо убедиться в том, что установка заземлена. При выполнении задания следует надежно закреплять все передвижные части установки при помощи винтов.
Во избежание выхода из строя установки подключение к ней блока питания следует производить строго в соответствии с последующим описанием!
I. Проверка основного закона динамики вращательного движения
твердого тела при 
1. Убедиться, что электропитание установки отключено!
2. Установить цилиндры на стержнях крестовины на одинаковом расстоянии  от оси крестовины до центра каждого цилиндра. Проверить, будет ли вращаться маятник при установленном значении Значение записать в табл. 1.
от оси крестовины до центра каждого цилиндра. Проверить, будет ли вращаться маятник при установленном значении Значение записать в табл. 1.
3. По заданию преподавателя выбрать один из радиусов двухступенчатого шкива, записать значение в табл. 1 и в дальнейшем не менять. Радиус меньшего шкива – = 20,0 мм, большего – = 35,0 мм. Прикрепить за узел нить к шкиву выбранного радиуса, перекинуть через верхний шкив и с другой стороны нити подвесить наборный груз. Массу груза  набрать произвольно при помощи разновесов, ее значение занести в табл.1.
набрать произвольно при помощи разновесов, ее значение занести в табл.1.
4. Установить кронштейн с фотодатчиком в нижней части шкалы вертикальной стойки так, чтобы плоскость кронштейна, окрашенная в красный цвет, совпала с одной из рисок шкалы, а наборный груз при движении вниз проходил по центру рабочего окна фотодатчика. За нижнее положение груза берется отметка шкалы, соответствующая риске на корпусе фотодатчика и являющаяся как бы продолжением оптической оси фотодатчика, которую пересекает движущийся груз.
5. Установить визир вертикальной стойки в верхней ее части так, чтобы его верх совпал с одной из рисок стойки. Определить расстояние между этой риской и нижним положением груза (оптической осью фотодатчика - см. пункт 4).). Значение пути , который будет проходить груз при движении, занести в табл.1 и в дальнейшем не изменять.
6. Аккуратно вращая маятник, установить груз таким образом, чтобы нижняя плоскость груза совпала с заданным положением визира вертикальной стойки. Зафиксировать груз в этом положении, для чего на задней панели электронного блока ФМ 1/1 нажать переключатель питания сети. При этом должен сработать фрикцион электромагнитного тормоза. При необходимости нажать кнопку «Сброс». На табло таймера блока питания может загореться значение 2 с, что не влияет на дальнейшие результаты.
7. Убрать визир в сторону от направления движения груза. Нажать кнопку «Пуск» блока. Произойдет растормаживание электромагнитного тормоза, груз начнет опускаться, и таймер блока зафиксирует время движения груза на пути .
8. Записать время движения груза в секундах в табл. 1 (таймер отсчитывает время в миллисекундах).
9. Внимание! Отключить



 ,
м
,
м
 ,
г
,
г
 ,
г
,
г
 ,
с
,
с
 ,
с
,
с









