Методика снятия всех механических характеристик одинакова - изменяется нагрузка на валу двигателя при помощи потенциометра Setpoint1 и фиксируются показания на табло преобразователя частоты – ток нагрузочной машины и скорость вращения. Показания других приборов нужны только для контроля, поэтому их можно не записывать.
На каждой характеристике нужно снять 5-6 точек, ориентируясь по току якоря испытуемой машины IЯ и току нагрузочной машины. Эти токи не должны превышать по абсолютной величине 5 А. Исходя из этого, определяются интервалы между точками.
В процессе выполнения эксперимента установка различных схем включения испытуемой машины и выбор требуемых значений сопротивлений с помощью переключателей может производиться при работающем двигателе.
4. Оформление отчёта и анализ полученных результатов.
В отчете должны быть приведены: принципиальная электрическая схема установки; паспортные данные машин; задание на работу; расчетные формулы с необходимой расшифровкой величин; примеры расчета, доведенные до числового результата одной точки характеристики; таблицы, в которых сведены результаты полного расчета характеристик; таблицы с экспериментальными данными; теоретические и экспериментальные характеристики, построенные на одном рисунке; влияние параметров схемы на вид механических характеристик; обоснование причин расхождения теоретических и экспериментальных характеристик.
РАБОТА № 4
Исследование механических характеристик асинхронного двигателя
С фазным ротором при питании от сети.
1. Программа работы.
1.1. Подготовка к работе.
Рассчитать и построить в интервале скоростей от 1.5 w0 до минус w0 механические характеристики:
1.1.1. Естественную.
1.1.2. Две искусственные с добавочными сопротивлениями RП1 и RП2 в цепи ротора.
1.1.3. Три характеристики динамического торможения: одну при добавочном сопротивлении в цепи ротора RП1 и две при постоянном токе в цепи статора IТ1 и IТ2.
1.2. Работа в лаборатории.
1.2.1. Осуществить пуск двигателя.
1.2.2. Снять механические характеристики, перечисленные в п. 1.1.1 ¸ 1.1.3.
1.3. Составление отчёта.
Отчёт должен включать:
1.3.1. Принципиальную электрическую схему установки.
1.3.2. Паспортные данные машин.
1.3.3. Расчёты теоретических характеристик и таблицы с результатами экспериментальных исследований.
1.3.4. Графики теоретических и экспериментальных характеристик.
1.3.5. Анализ полученных результатов и выводы, которые должны включать оценку свойств двигателя по следующим показателям:
- влияние схемы включения двигателя и ее параметров на вид механической характеристики;
- жёсткости естественной и искусственных механических характеристик;
- объяснение причин расхождения теоретических и экспериментальных кривых.
Расчет характеристик.
Все расчеты механических характеристик асинхронных двигателей основаны на Г-образной схеме замещения. При этом считается, что обмотки статора и ротора двигателя соединены звездой.
Расчёты механических характеристик асинхронных двигателей выполняются по формуле Клосса:
 (4.1)
(4.1)
Максимальный (критический) момент, соответствующий критическому скольжению sК, определяется как
 (4.2)
(4.2)
где m – число фаз обмоток статора; U1 – напряжение питания фазы статора; R1 – активное сопротивление фазы статора; ХК = Х1 + Х2‘ - реактивное сопротивление двигателя в режиме короткого замыкания; Х2‘ = Ке2 Х2 – приведенное реактивное сопротивление фазы ротора; Ке – коэффициент трансформации; w0 = 2πf / рП – синхронная скорость вращения; f = 50 Гц – частота напряжения питания. В (4.2) знак плюс относится к двигательному режиму работы, а минус – к генераторному.
Критическое скольжение определяется как
 (4.3)
(4.3)
где R2’ = Ке2 (R2 + RП) – приведенное полное активное сопротивление фазы ротора двигателя.
Коэффициент, учитывающий активное сопротивление обмотки статора, равен
 . (4.4)
. (4.4)
Скольжение s характеризует скорость вращения ротора w и определяется как
 (4.5)
(4.5)
Ниже приводятся паспортные данные двигателей.
Асинхронный двигатель с фазным ротором – MTF 011-6Y1
Номинальная механическая мощность, кВт – 1.4
Линейное напряжение питания при соединении обмоток звездой, В – 380
Частота напряжения питания, Гц – 50
Номинальный ток фазы статора, А – 5.3
Номинальная скорость вращения, об/мин – 880
Номинальный cos φ – 0.65
Число пар полюсов – 3
Коэффициент трансформации – 3.05
Активное сопротивление фазы статора при 75 град. С, Ом – 6
Индуктивное сопротивление рассеяния фазы статора, Ом – 4
Активное сопротивление фазы ротора при 75 град. С, Ом – 0.7
Индуктивное сопротивление рассеяния фазы ротора, Ом – 0.57
Индуктивное сопротивление контура намагничивания, Ом – 34
Вентильный двигатель с возбуждением от постоянных магнитов – DFY 90 MB/TH SM30
Номинальный момент, Нм – 12
Номинальный фазный ток, А – 7.9
Номинальное напряжение питания при соединении обмоток звездой, В - 380
Номинальная скорость вращения, об/мин – 3000

Расчет естественной механической характеристики двигателя производится с использованием (4.1) (линия 1 на рис. 4.2). Для этого в указанных в п. 1.1 пределах изменения скорости двигателя задаются рядом значений относительного скольжения s (не менее 15 точек). Затем, пользуясь (4.2) – (4.5), производят необходимые вычисления.
Расчет искусственных механических характеристик с добавочными сопротивлениями в цепи ротора ведут аналогичным образом. При этом необходимо принять во внимание (4.3) и пересчитать величину критического скольжения (линии 2 и 3 на рис. 4.2).
Результаты вычислений представляются в виде таблицы 4.1.
Таблица 4.1. Расчет механических характеристик асинхронного двигателя
| Исходные данные
| Естественная характеристика
| Искусственная характеристика
|
| RП1
| RП2
|
| s
| МК
| ε
| w
| SК
| М
| SК
| М
| SК
| М
|
|
| Нм
|
| рад/с
|
| Нм
|
| Нм
|
| Нм
|
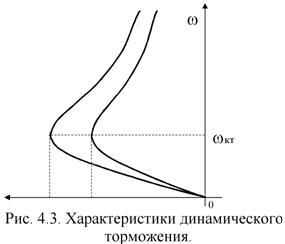
Расчет характеристик для режима динамического торможения (см. рис. 4.3) выполняется в соответствии с выражением
 . (4.7)
. (4.7)
При этом, считается, что
 , (4.8)
, (4.8)
 , (4.9)
, (4.9)
где Хμ – индуктивное сопротивление контура намагничивания. Напомним, что R’2 должно учитывать дополнительное сопротивление в цепи ротора двигателя.
Значение эквивалентного переменного тока IТЭ, зависит от схемы включения обмоток статора. При их соединении звездой и питании двух из них постоянным током IТ эквивалентный ток равен IТЭ = 0,816 IТ.
Порядок расчета характеристик динамического торможения следующий. Необходимо задаться рядом значений скорости вращения ротора (не менее 15 точек) и с помощью (4.7) – (4.9) выполнить требуемые вычисления. Результаты расчетов представляются в виде таблицы 4.2.
Таблица 4.2. Расчет характеристик динамического торможения асинхронного двигателя.
| Исходные данные
| Характеристики динамического торможения
|
| IП1
| IП2
|
| ω
| ωКТ
| МКТ
| М
| МКТ
| М
|
| рад/с
| рад/с
| Нм
| Нм
| Нм
| Нм
|