ИСТОКИ РАДИО
Поиски различных излучений
· В 1660—1670-е годы английские ученые Ньютон и Гук - существенный теоретический и экспериментальный вклад в физическую теорию света.
· В 1678 году Гюйгенс - волновая теория света - «Трактат о свете» — набросок волновой теории света.
· В 1800 году английский учёный У. Гершель открыл инфракрасное излучение.
· В 1801 году Риттер открыл ультрафиолетовое излучение.
1. 1831г. – английский физик Фарадей Майкл англ. – дает начало представлений об электромагнетизме.
2. 1864г. – английский физик Д.Максвелл - математическое обоснование идей Фарадея
3. 1888г. – немецкий физик Г.Герц классическими опытами подтверждает правильность выводов Фарадея и Максвелла.

Вибратор Герца, основанный на искровом разряде вторичной обмотки индукционной катушки

Активные исследования использования проводимости различных сред, в т.ч. почвы, воды:
1838- Штейнгель;
1842– Морзе;
1880 – Траубридж;
1886 - Пирс.
Работы по электростатической и электромагнитной индукции – Юз и Эдисон.
4. В 1890-94 –исследования Бранли в области использования металлических порошков, меняющих проводимость под действием ЭМ волн.
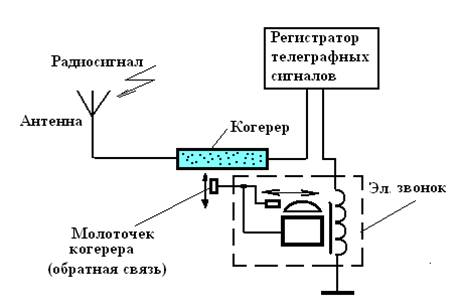
5. Оливер Лодж в 1894 г. на основе работ Бранли создал КОГЕРЕР (когезия - сцепление)
6. 1893г. – Тесла – передача и прием ЭМ волн вибратором (создатель антенны)
7. Эксперимент А.С.Попова 7 мая 1895г.
«Один небольшой шаг человека — огромный скачок человечества»
(Нил Армстронг 21 июля 1969, ступив впервые на поверхность Луны)
Первые работы по радиолокационному обнаружению самолетов в СССР были начаты в 1933 - 1934 г.г
В 1937 г в Ленинградском ФТИ был разработан импульсный метод радиолокации.
Серийная РЛС (РУС-1) появилась в 1938 г РУС-1 были применены во время финской военной кампании 1939-1940 гг.
В 1940 г было начато серийное производство первой импульсной радиолокационной станции дальнего обнаружения самолетов РУС-2 ("Редут").
Во время ВОВ было развернуто производство портативных РЛС "Пегматит".
В 1943 г был создан Институт локационной техники.
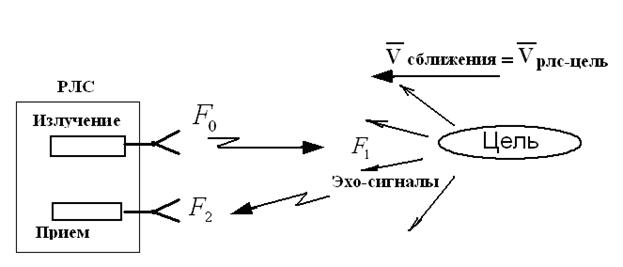
Радар - RADAR - Radio Detection and Ranging
№2
Теория информации
И проблемы радиолокации
Информация – сообщение снижающее энтропию (неопределенность, хаотичность). Энтропия – это показатель беспорядочности. Чем сильнее беспорядок тем выше энтропия
Переносчик информации – радиосигнал.
I - количество информации,
H -энтропия
.  (бит)
(бит)
 ;
; 
Дисперсия  (или рассеяние) – это математическое ожидание квадрата отклонение величины от ее математического ожидания
(или рассеяние) – это математическое ожидание квадрата отклонение величины от ее математического ожидания
 .
.
Здесь значение  отклонение величины от ее математического ожидания
отклонение величины от ее математического ожидания
Формула Шеннона
 (бит)
(бит)
 ( бит/с )
( бит/с )

При 

Wmin - мин. полоса рабочего сигнала
Избыточность информации - повышает качественные показатели системы.
В радиолокации используются радиоволны с длиной волны, приходящейся на сантиметровый,дециметровый и миллиметровый диапазоны.
Сам же вид излучаемого сигнала оказывается достаточно прост.
Уравнение Гильберта
Для узкополосных сигналов  , как это впервые показал Гильберт, допустимо представление
, как это впервые показал Гильберт, допустимо представление
 (1)
(1)
где  и
и  - медленно меняющиеся во времени функции, за период высокой частоты
- медленно меняющиеся во времени функции, за период высокой частоты  .
.
Переносчики информации: амплитуда, частота, фаза меняющиеся во времени.
№3
Физические основы радиолокации
1. Постоянство скорости сигнала 
2. Прямолинейность распространения сигнала
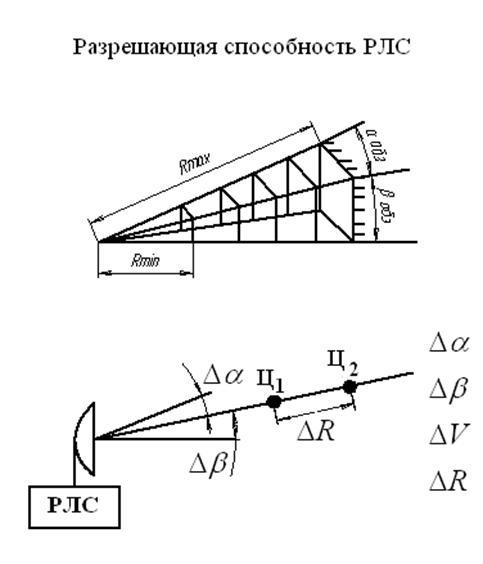
Пространственные характеристики цели

 - истинный азимут
- истинный азимут
 - угол места
- угол места





Определение дальности через
время  распространения сигнала
распространения сигнала





При 

При 

№4
Цели
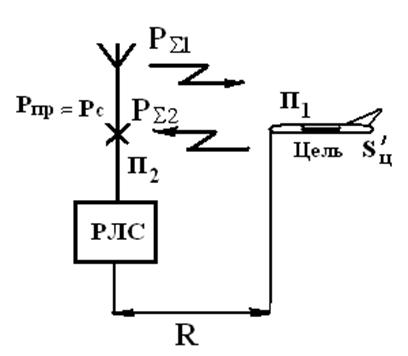
Уравнение радиолокации
(обнаружения цели)
1. Функция направленности

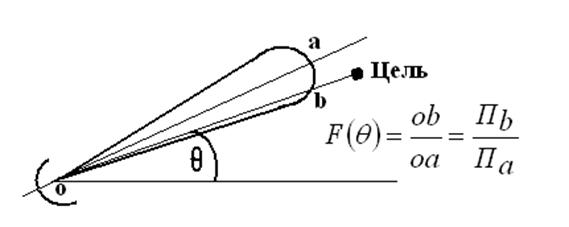
Па, Пb – напряженности поля в точках “ а ” и “ b ”
2. D – коэффициент усиления антенны
№5
УРАВНЕНИЕ РЛ
(для сосредоточенных целей в свободном пространстве)
Из (2)  - полная эффективная площадь рассеяния
- полная эффективная площадь рассеяния
Из (3)  Тогда
Тогда 
ЭПР цели  , (4)
, (4)
где  коэффициент поляризации.
коэффициент поляризации.
 (5)
(5)
 (6)
(6)
где  - площадь раскрыва антенны
- площадь раскрыва антенны
 (7)
(7)
Из (5) находим 
и с учетом

см.(1)
Учитывая функцию направленности  имеем в окончательном виде
имеем в окончательном виде

При совмещении приемной и передающей антенн

Pпор – порог чувствительности приемника
Дальность обнаружения цели  – максимальное расстояние на котором цель будет обнаружена с вероятностью не ниже заданной.
– максимальное расстояние на котором цель будет обнаружена с вероятностью не ниже заданной.
Для совмещенной приемно-передающей антенны


Дальность действия - расстояние, на котором необходимо выдать команду на срабатывание исполнительного механизма
№6
От земной поверхности
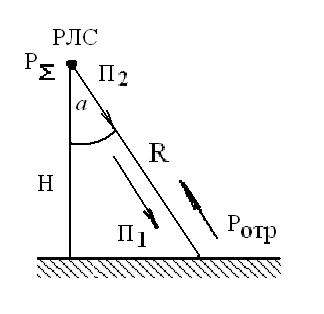

С учетом площади раскрыва антенны  , имеем
, имеем
 .
.
После подстановки ЭПР земли 
с учетом  получим:
получим:
 .
.
Откуда 
Выразим значение дальности через высоту:
 .
.
Окончательно мощность принятого сигнала

 .
.
m =5…10 коэффициент запаса по помехоустойчивости
Пеленгация цели
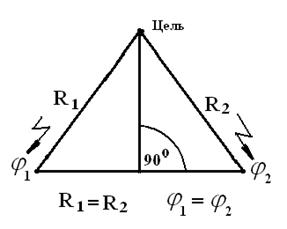
А) Амплитудная пеленгация (по остронаправленной антенне) в ближней радиолокации

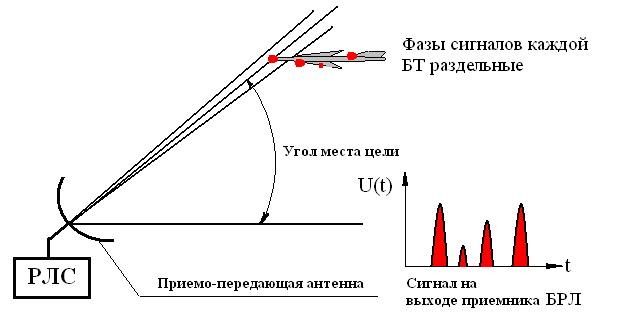
Б) Амплитудная пеленгация (по остронаправленной антенне) в радиолокации дальнего действия (РЛС ДД)
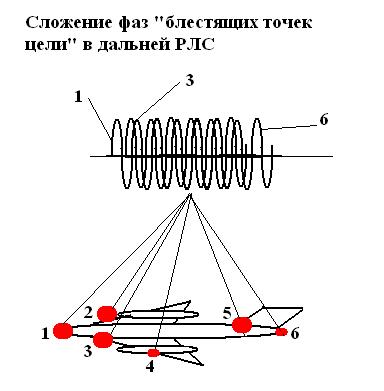

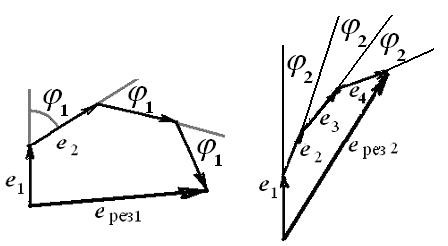
В) Фазовая пеленгация цели

Фазовое запаздывание сигнала  в каждой точке приемной антенны, согласно выражению
в каждой точке приемной антенны, согласно выражению  ( см. рис .)
( см. рис .)
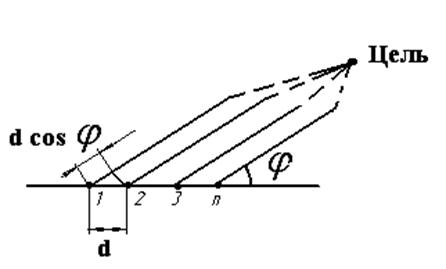

Принимаем 



По частоте Доплера
Доплеровская частота – это разность между излучаемой и принятой частотой, при относительном перемещении излучателя и приемника сигнала


При 











или  .
.
С учетом V<< C и разложив выражение  в степенной ряд
в степенной ряд
 ,
,
взяв только два первых значения разложения, получим, что п ринятая приемником частота будет изменяться на величину
 , т.е.
, т.е. 
При отражении сигнала от цели доплеровская частота принятого сигнала будет





где 


При 


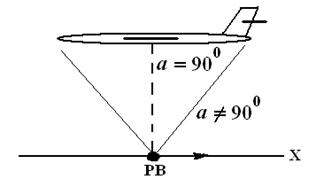
При встрече с землей


 -угол подхода к поверхности
-угол подхода к поверхности
Фазовый эффект Доплера





 При
При 




- фаза изменяется с частотой Доплера
АВТОДИНЫЕ РЛС




ПРЕОБРАЗОВАНИЕ СИГНАЛА В АВТОДИНЕ
ГЕНЕРИРОВАНИЕ РАДИОЧАСТОТЫ
Автовозбуждени е автодина при условии


Устойчивое генерирование автодина при условии



МОДУЛИРОВАНИЕ (внутреннее) – за счет фазовых изменений 
ДЕТЕКТИРОВАНИЕ (анодное и диодное)
РАБОЧИЙ СИГНАЛ АВТОДИНА





Амплитуда наведенная в антенне- 

Найдем связь между  и
и 
RΣ = (πρ/D) (h д /λ)2 ;  ;
; 

 R
R  - вносимое (наведенное) сопротивление
- вносимое (наведенное) сопротивление
ЕДС автодина.




Рабочий сигнал автодина

Экв. схема автодина по РЧ;
Rн – сопр.нагрузки.
 ;
;  ;
;
 -постоянная составляющая
-постоянная составляющая
 - ток в нагрузке
- ток в нагрузке

Наведенная э.д.с. - дополнительное напряжение -  .
.

 , или
, или


 -
- 
 =
= 
Учитывая, что  ,
,
разложив в ряд 1 / (1-х) =1+Х+Х2+Х3+…, 1/(1-х)=1+Х.
Имеем

Sa - радиочастотная чувствительность автодина
 - режимная радиочастотная чувствительность автодина
- режимная радиочастотная чувствительность автодина
=  .
. 
где  - к.п.д. антенны автодина.
- к.п.д. антенны автодина.
Пример:  Sa = E/ 4; При E=200 В. S=50 В.
Sa = E/ 4; При E=200 В. S=50 В.
СХЕМА АВТОДИНА
С АМ - ЧМ ДЕТЕКТИРОВАНИЕМ


( Использование – см. в разделе АРЛС)
Доплеровской РЛС


 (1)
(1)
 (2)
(2)

 (3 )
(3 )
 ;
;
 (4)
(4)
 ( сближение )
( сближение ) 
 ( удаление )
( удаление ) 
 (5)
(5)
 ;
; 


 (1)
(1)
 -коэффициент преобразования
-коэффициент преобразования
 (3)
(3)







ДГРЛС С двойным преобразованием частоты

1.  2.
2.  3.
3. 
4. 
5. 
6. 
7. 

Измерение дальности ДГРЛС

1-первый передатчик; 2-второй передатчик;
3-первый приемник; 4-второй приемник; 5-фазометр;
6-передающая антенна; 7-приемная антенна.

Мгновенные фазы излученных сигналов

Мгновенные фазы отраженных сигналов


Мгновенные фазы преобразованного сигнала

Принимаем Fд1=Fд2 и fо+Fд=fо,
тогда 
т.е. 

Если принять  , тогда получим
, тогда получим  .
.
Пример, если Rmax=50 метров,
 ,
,
для Rmax=10 метров имеем


Главное достоинство - отсутствие помех от неподвижных предметов, не создающих эффект Доплера.
Корреляционная обработка
Сигнала в РЛс







Для сложного сигнала

Схема счётчика

 - усилитель-ограничитель
- усилитель-ограничитель

Зарядные импульсы через цепь: E, R1, C1 D2, интегратор C2R2.
При больших  для установленного режима
для установленного режима
 (1)
(1)
 N -
N - 
 самого короткого импульса
самого короткого импульса 
Поэтому  не зависит от
не зависит от 
При скачках  от
от  до E
до E
 разряжается через диод D1 и транзистор V1
разряжается через диод D1 и транзистор V1
Зарядные импульсы 
где 
На  находится заряд (от первого импульса
находится заряд (от первого импульса  )
)

U при 

Тогда  (2)
(2)
С учётом  и (1), (2)
и (1), (2)
 (3)
(3)
С учётом 
 (4)
(4)
где 
ПАМ

Основные характеристики
 ;
;  ;
;  ;
;  ;
;  ;
;  .
.
Прямое усиление


 ;
;  (1)
(1)
 =
= 

 ;
;  ;
;











Пример 




Минимальная дальность обнаружения
 (6)
(6)
Откуда  (7)
(7)
При  принимается
принимается 
Скважность 

Гетеродинный прием


Дальность обнаружения цели
 (8)
(8)

 (9)
(9)








Снижение уровня П.П


 -число диполей в единице объема
-число диполей в единице объема


Принимаем 
Т.е вместо  принимаем
принимаем 
Считаем 

При отсутствии селекции по  , то при
, то при 
 ~
~  - основной вклад вносят близко лежащие диполи
- основной вклад вносят близко лежащие диполи
Если есть разрешение по  , т.е
, т.е  тогда
тогда

При 
 ~
~ 
Закон изменения мощности пассивных помех
на входе ИС без ПРУ


 -коэф. схемной помехоустойчивости
-коэф. схемной помехоустойчивости


Опасная средняя плотность пассивнойпомехи безПРУ 




Применение ПРУ






При 

Сравним  и
и  при
при 

Стробирование приёмника.










 характ. сопр.контура;
характ. сопр.контура;  резонансная частота
резонансная частота



Пути улучшения стробирования:
1.увеличение  ;
;
2.повышение  ;
;
3.выбор большого значения 
3. помехозащищенность и
Помехоустойчивость РЛС
(ПЗ = ПУ+скрытность)
Без помех 

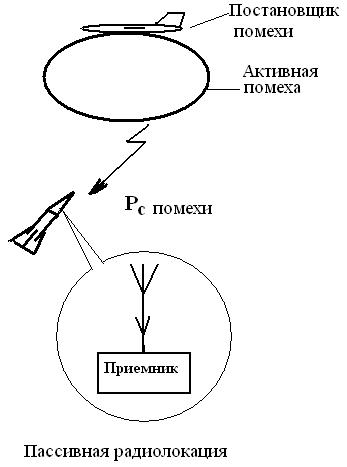
В помеховой обстановке

Эквивалентная мощность помехи

Канал помех (КП)




Схема КП

Селекция сигналов по их длительности


Связь ВПЦ с вероятностью распознавания сигнала
 - вероятность правильного распознавания полезного сигнала
- вероятность правильного распознавания полезного сигнала
 - вероятность правильного распознавание помехи
- вероятность правильного распознавание помехи
 - вероятность неправильного распознавания полезного
- вероятность неправильного распознавания полезного
Сигнала
 - изменение ВПЦ
- изменение ВПЦ
 - ВПЦ без помех
- ВПЦ без помех

 ;
;  - изменение вероятности отказов и ложного
- изменение вероятности отказов и ложного
срабатывания за счет отнесения помехи к классу сигналов от цели
 ;
;  - аналогично -за счет отнесения полезного сигнала к классу помех
- аналогично -за счет отнесения полезного сигнала к классу помех
 - потери за счет неправильного
- потери за счет неправильного
распознания помехи

|
|
|