Цель работы: изучить законы изменения кинетического момента и кинетической энергии механической системы, определить скорость пули с помощью баллистического маятника.
Теоретическое обоснование
Баллистический маятник является разновидностью физического маятника и представляет собой твёрдое тело, вращающееся вокруг горизонтальной оси. При этом ось не проходит через центр масс тела. В лабораторной работе маятник состоит из полого цилиндра, заполненного пластилином и закреплённого на металлическом стержне.
Кинетический момент механической системы из n материальных точек относительно центра вращения О
 , (9.1)
, (9.1)
где  - векторный момент k -й точки системы.
- векторный момент k -й точки системы.
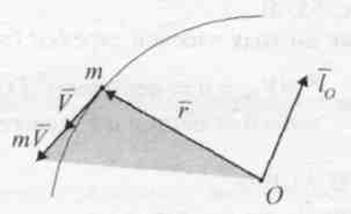
Векторный момент количества движения материальной точки относительно центра – вектор, приложенный в этом центре и направленный перпендикулярно плоскости векторов  и
и  в ту сторону, откуда движение точки видно против хода часовой стрелки (рис. 9.1).
в ту сторону, откуда движение точки видно против хода часовой стрелки (рис. 9.1).
Рис. 9.1. К определению векторного момента количества движения материальной точки
Приведенное определение удовлетворяет векторному равенству
 .
.
Кинетическим моментом или главным моментом количеств движения механической системы относительно оси называется алгебраическая сумма моментов количеств движения всех материальных точек системы относительно той же оси
 .
.
Если на систему действуют внешние силы  , то кинетический момент изменяется по закону
, то кинетический момент изменяется по закону
 , (9.2)
, (9.2)
где  - момент всех внешних сил относительно центра О.
- момент всех внешних сил относительно центра О.
Кинетический момент твёрдого тела, вращающегося вокруг неподвижной оси z c угловой скоростью 
 , (9.3)
, (9.3)
где  - момент инерции тела относительно оси.
- момент инерции тела относительно оси.
Кинетическая энергия механической системы есть арифметическая сумма кинетических энергий всех материальных точек этой системы
 , (9.4)
, (9.4)
где  k – величина скорости k -й точки в момент времени t;
k – величина скорости k -й точки в момент времени t;
mk – масса k -й материальной точки.
Кинетическая энергия твёрдого тела, вращающегося вокруг неподвижной оси z c угловой скоростью , определяется по формуле
 . (9.5)
. (9.5)
Полная механическая энергия системы n материальных точек определяется суммой кинетической и потенциальной энергий
 , (9.6)
, (9.6)
где  - потенциальная энергия взаимодействия частиц системы или её собственная потенциальная энергия;
- потенциальная энергия взаимодействия частиц системы или её собственная потенциальная энергия;
 - радиус-векторы частиц системы.
- радиус-векторы частиц системы.
Собственная потенциальная энергия определяется только взаимным расположением частиц системы и её зависимость от радиус-векторов выражается через их разности  . Следовательно, остаётся неизменной при изменениях начала координат и преобразованиях Галилея.
. Следовательно, остаётся неизменной при изменениях начала координат и преобразованиях Галилея.
Закон изменения механической энергии системы при её переходе из одного механического состояния в другое можно записать в виде
 , (9.7)
, (9.7)
где  - суммарная работа всех внешних сил, действующих на систему;
- суммарная работа всех внешних сил, действующих на систему;
 - суммарная работа всех внутренних неконсервативных сил.
- суммарная работа всех внутренних неконсервативных сил.
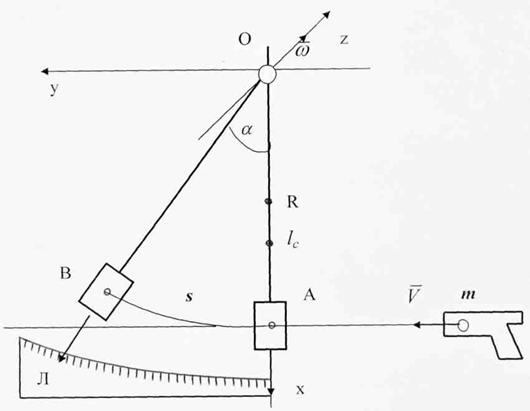
Рассмотрим систему «маятник+пуля» (рис. 9.2). На неё действуют внешние силы: силы тяжести, сила сопротивления воздуха, реакции опоры и силы трения в опорных призмах маятника. Кроме того, в течение времени соударения пули с маятником  (времени, когда скорость пули относительно маятника становится равной нулю) между маятником и пулей действуют силы внутреннего трения, являющиеся неконсервативными. В дальнейшем выводе считаем, что сила сопротивления воздуха и силы трения в опорных призмах пренебрежимо малы и их можно не учитывать.
(времени, когда скорость пули относительно маятника становится равной нулю) между маятником и пулей действуют силы внутреннего трения, являющиеся неконсервативными. В дальнейшем выводе считаем, что сила сопротивления воздуха и силы трения в опорных призмах пренебрежимо малы и их можно не учитывать.
Пусть  - период колебаний маятника с пулей, возникающих после соударения. Если предположить, что << , то за время отклонение маятника с пулей от положения равновесия незначительно. Момент силы тяжести, действующей на систему относительно точки О (см. рис. 9.2) в течение этого времени можно считать равным нулю. Поскольку момент силы реакции опоры относительно точки О всегда равен нулю, а другими внешними силами мы пре-
- период колебаний маятника с пулей, возникающих после соударения. Если предположить, что << , то за время отклонение маятника с пулей от положения равновесия незначительно. Момент силы тяжести, действующей на систему относительно точки О (см. рис. 9.2) в течение этого времени можно считать равным нулю. Поскольку момент силы реакции опоры относительно точки О всегда равен нулю, а другими внешними силами мы пре-
небрегаем, то, согласно уравнению (9.2) в течение времени соударения  , то есть кинетический момент системы «маятник+пуля»
, то есть кинетический момент системы «маятник+пуля»  для всех
для всех  .
.
Рис. 9.2. Принципиальная схема экспериментальной установки
Так как в соответствии с уравнениями (9.1) … (9.3)
 ;
;
 ,
,
где  (рис. 9.2);
(рис. 9.2);
- скорость пули;
Iz - момент инерции маятника с пулей относительно оси Oz;
- угловая скорость вращения маятника в момент ,
то
 . (9.8)
. (9.8)
Так как после соударения действие сил внутреннего трения прекращается, то для всех 
 и изменение механической энергии системы «маятник+пуля» будет, в соответствии с уравнением (9.7) равно
и изменение механической энергии системы «маятник+пуля» будет, в соответствии с уравнением (9.7) равно
 , (9.9)
, (9.9)
где - работа сил тяжести (работа всех других внешних сил считается пренебрежимо малой).
Пусть  - угол максимального отклонения маятника с пулей от положения равновесия, а
- угол максимального отклонения маятника с пулей от положения равновесия, а  - соответствующий такому отклонению момент времени. Тогда с учётом независимости работы сил тяжести от формы пути для величин, входящих в уравнение (9.9), запишем
- соответствующий такому отклонению момент времени. Тогда с учётом независимости работы сил тяжести от формы пути для величин, входящих в уравнение (9.9), запишем
 ; (9.10)
; (9.10)
 ; (9.11)
; (9.11)
 , (9.12)
, (9.12)
где М - масса маятника (без пули);
m - масса пули;
lc - координата центра инерции (совпадает с центром масс);
 - вектор вертикального перемещения центра инерции маятника с пулей, причём
- вектор вертикального перемещения центра инерции маятника с пулей, причём  - см. рис. 9.2;
- см. рис. 9.2;
П(t) – потенциальная энергия взаимодействия пули с маятником и частиц маятника друг с другом в момент времени t.
Поскольку после соударения мы рассматриваем маятник с пулей как твёрдое тело (недеформируемое), то  . С учётом этого подставляем уравнения (9.10)…(9.12) в уравнение (9.9) и получаем
. С учётом этого подставляем уравнения (9.10)…(9.12) в уравнение (9.9) и получаем
 . (9.13)
. (9.13)
Согласно определению центра инерции
 , (9.14)
, (9.14)
где R – расстояние от точки О до центра инерции маятника без пули.
Подставив выражение (9.14) в формулу (9.13) получаем
 . (9.15)
. (9.15)
Определив из формулы (9.8) и подставив его в (9.15), находим формулу для скорости пули
 . (9.16)
. (9.16)
Момент инерции Iz находится из формулы для периода колебаний физического маятника
 ;
;
Откуда
 . (9.17)
. (9.17)
Подставив выражение (9.17) в формулу (9.16), получим
 . (9.18)
. (9.18)
Если принять во внимание, что  , где S – путь, пройденный свободным концом маятника при его максимальном отклонении от положения равновесия (см. рис. 9.2),
, где S – путь, пройденный свободным концом маятника при его максимальном отклонении от положения равновесия (см. рис. 9.2),  , где t – время n полных колебаний маятника с пулей, а отношение
, где t – время n полных колебаний маятника с пулей, а отношение  мало, то, заменяя
мало, то, заменяя  его аргументом, получаем
его аргументом, получаем
 . (9.19)
. (9.19)
В последней формуле все величины, входящие в правую часть, могут быть определены прямыми измерениями.
Описание оборудования
Баллистический маятник состоит из полого цилиндра А, заполненного пластилином и закреплённого на металлическом стержне (см. рис. 9.2). Металлический стержень крепится в точке О к треугольным опорным призмам, уменьшающим силу трения в опоре. Масса маятника М. В маятник стреляют в горизонтальном направлении из пружинного пистолета пулей массой m. После неупругого соударения маятник с пулей начинает колебаться под действием силы тяжести. На установке укреплена масштабная линейка Л для определения пройденного свободным концом маятника пути S. Для определения периода колебаний используют секундомер. Полная длина маятника l = ОА, расстояние от точки О до центра инерции маятника R. Внешний вид установки приведен на рис. 9.3.

Рис. 9.3. Общий вид экспериментальной установки:
1 – стойка; 2 – стержень (спица); 3 - груз из пластилина; 4 – пистолет; 5 – линейка; 6 – секундомер; 7 – соединительные провода; 8 - подставка
Подготовка к проведению работы
1. Проработать тему по учебнику С.М. Тарга «Краткий курс теоретической механики» М., 1995.
2. Проработать методические указания к лабораторной работе.
3. Подготовить расчётные формулы и таблицы для записи вычислений.
4. Ответить на контрольные вопросы.
Порядок выполнения работы
1. Снять маятник с опоры, поместить его на горизонтальную призму и, уравновесив оба конца маятника, определить его центр инерции R (совпадающий с центром масс) c точностью 0,5 мм. Отметить на стержне маятника центр инерции R.
2. Определить массу маятника М, взвесив его на аналитических весах с точностью 0,05 г. Результат внести в табл. 9.1.
3. Поместить стержень маятника на опорные призмы. Измерить расстояние от опорных призм до отмеченного центра инерции R с точностью 0,5 мм. Результат внести в табл. 9.1.
4. Определить массу пули m, взвесив её на аналитических весах с точностью 0,05 г. Результат внести в табл. 9.1.
5. Произвести выстрел, измерить смещение конца маятника с пулей от положения равновесия S по линейке Л, По секундомеру определить время t полных колебаний и посчитать число полных колебаний n. Измерить расстояние от опорных призм до центра удара пули l. Все результаты измерений внести в табл. 9.2.
6. Повторить п.5 ещё четыре раза и результаты измерений внести в табл. 9.2.
Таблица 9.1
| Измеряемые величины
| Значение
|
| Масса маятника М, г
|
|
| Расстояние до центра инерции R, м
|
|
| Масса пули m, г
|
|
Таблица 9.2
| Измеряемые величины
| Значение
|
| Смещение маятника Si, м
| S1 =
|
| S2 =
|
| S3 =
|
| S4 =
|
| S5 =
|
| Время колебаний ti, с
| t1 =
|
| t2 =
|
| t3 =
|
| t4 =
|
| t5 =
|
| Число колебаний ni
| n1 =
|
| n2 =
|
| n3 =
|
| n4 =
|
| n5 =
|
| Расстояние до точки удара li, м
| l1 =
|
| l2 =
|
| l3 =
|
| l4 =
|
| l5 =
|
Обработка результатов
1. Определить скорость полёта пули с точностью до второго знака после запятой по формуле (9.19) для пяти вариантов измеренных величин и записать результаты
;
 м/с;
м/с;  м/с;
м/с;  м/с;
м/с;  м/с;
м/с;  м/с.
м/с.
Внести результаты расчётов в табл. 9.3.
2. Вычислить сумму скоростей пули по формуле
и результат внести в табл. 9.3.
3. Вычислить среднее арифметическое значения скорости пули и результат внести в табл. 9.3
 .
.
4. Вычислить отклонения отдельных измерений для каждого значения скорости от среднего арифметического по формуле
и результаты внести в табл. 9.3.
5. Отклонения возвести в квадрат  , определить сумму
, определить сумму  и результаты внести в табл. 9.3.
и результаты внести в табл. 9.3.
6. Определить дисперсию и среднее квадратическое отклонение серии измерений для скорости пули
 ;
;  ,
,
результаты внести в табл. 9.3.
7. Определить коэффициент вариации для скорости пули и результат внести в табл. 9.3
8. Вычислить доверительный интервал средних значений измерений для среднего значения скорости пули при доверительной вероятности 0,95, выбрав критерий Стьюдента из табл. 3.1 для числа степеней свободы k = m - 1 и результат записать в табл. 9.3
 .
.
9. Записать достоверное значение скорости полёта пули и результат внести в табл. 9.3 с указанием размерности
 .
.
Таблица 9.3
| Вычисляемые величины
| Результаты вычислений
|
| 1=
| 2=
| 3=
| 4=
| 5=
|
| |
|
| |
|
| | | | | |
|
| | | | | |
|
| |
|
| |
|
| |
|
| |
|
| |
Контрольные вопросы
1. Приведите определение и формулы кинетического момента механической системы.
2. Нарисуйте схему и объясните, как определяется векторный момент количества движения материальной точки.
3. Как определяется изменение кинетического момента механической системы при действии на неё внешних сил?
4. Приведите определение и формулу кинетической энергии механической системы.
5. Приведите формулу кинетической энергии механической системы при её вращательном движении.
6. Как определяется полная энергия механической системы?
7. Как определить изменение механической энергии системы «маятник + пуля»?
8. Объясните аналитическое и практическое определение центра инерции в данной работе.
9. Как определяется момент инерции маятника с использованием формулы периода колебаний?
10. Приведите основную расчётную формулу скорости полёта пули и объясните входящие в неё величины.
Лабораторная работа № 10