

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Интересное:
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
ФЗ 1 порядка – звено дифференциальное уравнение которого имеет вид
Xвых(t)= K[TXвх(t) + Xвх(t)]
t – постоянная времени характеризующая степень влияния скорости изменения входной величины на выходную.
 Пример: может служить в конце цепочки.
Пример: может служить в конце цепочки.
Наличие ФЗ 1 порядка в основном контуре САУ означает введение производной в закон управления что обычно делается в целях улучшения качества управления.
W(p) = k(Tp+1)
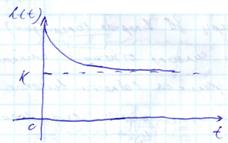
Переходная характеристика ФЗ 1 порядка имеет вид:
h(t) = k[Tδ(t) + 1(t)]
Комплексные переходные характеристики
W(iω) = k(1+iTω)
A(ω) = k 
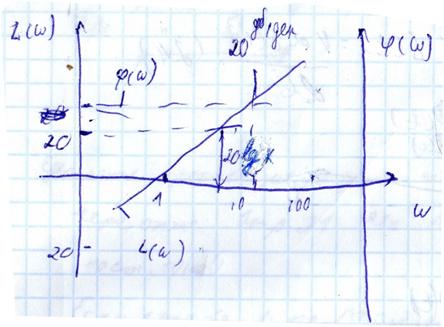
φ(ω) = arctg(Tω)
L(ω) = 20lgk + 20lg 
 Логарифмические частотные характеристики ФЗ 1 порядка обратны соответствующим характеристикам инерционного звена 1 порядка (апериодич.) с увеличением частоты входного сигнала относительная амплитуда выходного сигнала увеличивается в области высоких частот. При изменении частоты входного сигнала от 0 до ∞ сдвиг фазы выходного сигнала относительно входного изменяетя от 0 до 90°.
Логарифмические частотные характеристики ФЗ 1 порядка обратны соответствующим характеристикам инерционного звена 1 порядка (апериодич.) с увеличением частоты входного сигнала относительная амплитуда выходного сигнала увеличивается в области высоких частот. При изменении частоты входного сигнала от 0 до ∞ сдвиг фазы выходного сигнала относительно входного изменяетя от 0 до 90°.
Форсирующее (диференцирующее) звено 2го порядка.
Xвых(t) = k[T2Xвх(t) + 2Tξ Xвх(t) + 1]
Это произведение нельзя представить как произведение двух двучленов, т.к. в этом случае это звено можно было бы заменить 2мя форсирующими звеньями 1 порядка обьедененных последовательно.
 W(p) = k [T2p2+2Tξp + 1]
W(p) = k [T2p2+2Tξp + 1]
W(iω) = k [(1-T2ω2) + i2Tξ ω]
A(ω) = k 
φ(ω) = arctg 
L(ω) = 20lgk + 20lg
Сравнив формулы фазочастотных характеристик и ЛАЧХ соответствующие формуле колебательного звена мы видим что они отличаются лишь знаком, поэтому L(ω) и φ(ω) форсирующего звена 2 порядка представляет собой зеркальное отражение соответствующих кривых колебательного звена.
Наличие такого звена в таком контуре САУ означает введение 1ой и 2ой производной в закон управления. Это обычно используется для улучшения его качества.
|
|
Дифференцирующие звено.
Идеальным ДЗ называется такое звено дифферинцирующего уравнения которое имеет вид:
Xвых = kXвх(t) (1)
Выходная величина такого звена пропорциональна производной от входной величины.


Единственным идеальным дефференцирующем звеном которое в полной мере описывает выражение (1) является тахогенератор постоянного тока.
Если в качестве входной величины рассматривать угол поворота ротора (φ) а в качестве выходной ЭДС якоря (Е). В тахогенераторе постоянного тока при неизменном потоке возбуждения ЭДС в якоре пропорционально скорости вращения.
В режиме близком к холостому ходу, когда сопротивление нагрузки не велико, можно считать что напряжение якоря равно ЭДС.
Е = V
|

 V = k
V = k 
W(p) = kp
h(t) = k*1(t) = kδ(t)
ω(t) = kδ(t) = 


ЛЧХ идеального ДЗ обратны соответствующим характеристикам интегрирующего звена.
Понятие устойчивости САУ.
Определение устойчивости линейной невозмущенной системы, то есть системы, при нулевом входном сигнале (g(t)º0).
Линейная невозмущенная система:
Линейная система устойчива, если переходный процесс в системе затухает с течением времени, т.е. если собственное (свободное) движение системы
x(t)→0 при t→  .
.
Под устойчивостью линейной системы понимают свойство затухания переходного процесса с течением времени.
Необходимое условие устойчивости - положительность всех коэффициентов характеристического уравнения. При n³3 оно недостаточно. Как будет показано ниже на ряде примеров САУ третьего порядка (n=3) может оказаться неустойчивой и при положительных коэффициентах дифференциального уравнения.
Если li=ai+wi - корень характеристического уравнения (i=1..n)
 ,
,
то условие устойчивости системы - расположение корней характеристического уравнения в левой полуплоскости комплексного нпременного l (αi<0).
|
|
Это очевидно из равенства
 .
.
(для упрощения предполагается, что у характеристического уравнения нет кратных корней).
21.Переходные и установившиеся процессы.
Переходный процесс:
Переходный процесс характеризуется:
- Длительностью переходного процесса (t п), то есть временем от начала переходного процесса до момента, начиная с которого выходная величина остается в пределах ±d% от установившегося значения (обычно, d%=±5%).
- Максимальным отклонением регулируемой величины (xmax) или величиной  ) - перерегулированием. Перерегулирование может быть выражено в процентах от установившегося значения)
) - перерегулированием. Перерегулирование может быть выражено в процентах от установившегося значения)
 .
.
Обычно перерегулирование лежит в пределах 10..30%, в некоторых случаях допускается перерегулирование до 70% [2].
- Временем нарастания выходного сигнала (tн). В точке x(t)=x(t®¥)/2 строят касательную к x(t)и определяют временя нарастания, как показано на рис.1.
- Колебательностью, то есть числом колебаний, которое может наблюдаться в течение времени переходного процесса (обычно, 1..2 колебания, иногда - и 3..4 колебания). В некоторых с системах колебания на допускаются вообще [2].
Используются и другие критерии оценки переходных процессов (например, время запаздывания).
 Те же критерии оценки применимы и для случая x(t®¥)=0.
Те же критерии оценки применимы и для случая x(t®¥)=0.
Критерий устойчивости САУ.
В ТАУ разработан ряд правил, с помощью которых можно судить о знаках действительных
частей корней, не решая характеристическое уравнение и не находя числовые значения
самих корней. Эти правила получили название критериев устойчивости.
Различают алгебраические и частотные критерии устойчивости.
Алгебраические критерии устанавливают необходимые и достаточные условия
отрицательности корней в форме ограничений, накладываемых на определенные
комбинации коэффициентов характеристического уравнения системы.
Частотные критерии определяют связь между устойчивостью системы и формой ее частотных характеристик.
Понятие об устойчивости системы регулирования связано со способностью. Возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели её из этого состояния. Наглядно устойчивость равновесия можно проил-ть
 В виде шара лежащего в некотором углублении.
В виде шара лежащего в некотором углублении.
|
|
При всяком отклонении его от положения равновесия, шар будет стремится вернуться к нему точно (при отсутствии сил трения)или к некоторой конечной области, окружающ предшеств.равновесия обл-ти
(при наличии сил трения).Такое положение шара будет устойчивым.
|
|
|

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!