Программа simplex1написана на языке программирования Borland С++ v.3.1.
Исполняемый файл программы: simplex1.exe.
Минимальные системные требования:
* IBM–совместимый персональный компьютер с процессором от 386 и выше;
* оперативная память от 2 Mb;
* 16 Kb на жестком диске;
* операционная система MS–DOS 6.xx.
Приложение 2
Работа с программой
Ввод исходных данных
· Ввести число уравнений и число переменных (без базисных).
Пример. Найти наименьшее значение линейной функции F=–X1+7X2+168 при следующих ограничениях:
 X1 ³ 0
X1 ³ 0
X2 ³ 0
X3 = – X1 – X2 + 12 ³ 0
 X4 = – X1 + 10 ³ 0
X4 = – X1 + 10 ³ 0
X5 = – X2 + 12 ³ 0
X6 = X1 + X2 – 1 ³ 0
Число уравнений: 4. Число свободных переменных: 2.
· Заполнить симплекс-таблицу. Пример заполнения таблицы для данного примера показан на рис. П.2.1.
· Ввести критерий поиска – минимум или максимум. В данной программе в целях упрощения алгоритма решения ОЗЛП поиск минимума целевой функции F сведен к поиску максимума функции – F. Поэтому в случае минимизации знаки коэффициентов целевой функции заменяются на противоположные.
Программа предоставляет возможность корректировки введенных данных. Если при вводе данных Вы не допустили ошибок, то после соответствующего запроса нажмите клавишу ‘Д’ (’д’, ’L’, ’l’) и продолжить работу, в противном случае следует нажать любую другую клавишу и повторить процедуру ввода.
Поиск решения
По ходу решения задачи программа будет задавать Вам вопросы, помогая проверять усвоение учебного материала. В случае неправильного ответа программа предъявит правильный и даст необходимые пояснения.
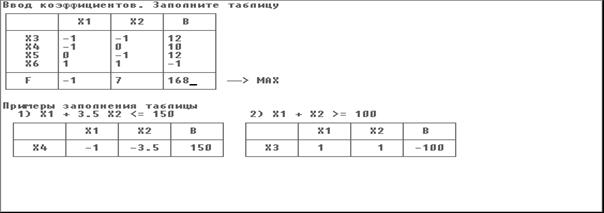
Рис. П.2.1. Заполнение симплекс-таблицы
Если текущий план является опорным, то начинается поиск оптимального решения, в противном случае необходимо найти опорный план.
Получив опорное решение, программа начинает оптимизацию целевой функции F.
Если план оптимален, то программа выводит на экран оптимальное значение функции и соответствующее ему решение (значения переменных) (см. рис. 2.4). После вывода результатов программа ожидает нажатия клавиши Enter для выхода в операционную систему.
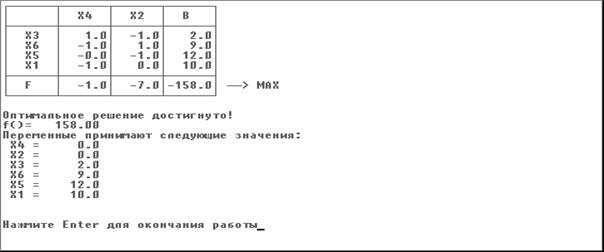
Рис. П.2.2. Результат работы программы
Меняя значение коэффициентов в уравнениях ограничений и в целевой функции, проследить изменение оптимальных значений функции. Изменение одного из коэффициентов рассматривается как проведение однофакторного эксперимента, двух – как двухфакторного и т.д.
СОДЕРЖАНИЕ
| Введение…………………………………………………………
|
|
| 1. Основные свойства и модели линейного программирования………………………………………………………………..
|
|
| 1.1. Граф-схема решения задачи линейного программирования………………………………………………………………..
|
|
| 1.2. Алгебраическая модель решения задачи линейного программирования…………………………………………………..
|
|
| 1.3. Геометрическая форма представления процесса решения.……………………………………………………………….
|
|
| 1.4. Свойства задач линейного программирования………………………………………………………………..
|
|
| 2. Симплекс-метод решения задачи линейного программирования……………………………………………………………...
|
|
| 2.1. Иллюстрация процесса поиска решения………………….
|
|
| 2.2. Алгебраическое решение…………………………………..
|
|
| 2.3. Табличный вариант замены переменных…………………
|
|
| 2.4. Система «Тренажер»……………………………………….
|
|
| 2.5. Система правил замены переменных……………………..
|
|
| 3. Инвестиционные проекты в концепции транспортной задачи ЛП…………………………………………………………..
|
|
| 3.1. Транспортная топология инвестиций. Формирование заданий……………………………………………………………..
|
|
| 3.2. Формирование конкретной системы данных задачи линейного программирования…………………………………….
|
|
| 3.3. Программа Random (Windows-версия)……………………
|
|
| 3.4. Экономическое содержание двойственности……………..
|
|
| 4. Транспортная задача линейного программирования……….
|
|
| 4.1. Составление опорного плана ТЗ по методу северо-западного угла (СЗУ)……………………………………………
|
|
| 4.2. Составление опорного плана ТЗ по методу минимума стоимостей перевозки…………………………………………..
|
|
| 4.3. Сравнение планов по критерию стоимости………………
|
|
| 4.4. Проверка лучшего опорного плана на оптимальность…..
|
|
| 4.5. Улучшение плана по методу циклических перестановок..
|
|
| Заключение………………………………………………………
|
|
| Библиографический список…………………………………….
|
|
| Приложения……………………………………………………...
|
|
| Приложение1 …………………………………………………….
|
|
| Приложение2 …………………………………………………….
|
|

Виктор Михайлович Панченко
Александр Владимирович Панов
Теория принятия решений
линейное программирование
Учебное пособие
Редактор В.Б. Закорюкин
Литературный редактор Л.В. Омельянович
Изд. лицензия № 020456 от 04.03.97
Подписано в печать 14.01.2002. Формат 60x84 1/16.
Бумага офсетная. Печать офсетная. Усл. печ. л. 3,02.
Усл. кр.-отт. 12,08. Усл.-изд. л. 3,25. Тираж 100 экз. С 30
Московский государственный институт радиотехники,
электроники и автоматики (технический университет)
117454, Москва, пр-кт Вернадского, 78






