1.2 Звено – это деталь или несколько деталей, жестко связанных между собой и движущихся в механизме как одно целое.
Подвижные звенья обозначены на рис. 1.1 цифрами 1…5, неподвижное звено (стойка) цифрой 0. Подвижные звенья: 1 - кривошип, совершающий вращение вокруг точки О1 с постоянной частотой n1; 2 – кулиса, совершающая плоскопараллельное движение; 3 – камень, вращающийся вокруг точки О3; 4 – камень, движущийся поступательно; 5 – ползун, движущийся возвратно-поступательно. Входным звеном является кривошип 1, соединенный с приводом. Выходным звеном – ползун 5, с которым связан режущий инструмент поперечно-строгального станка. Механизм предназначен для преобразования вращательного движения кривошипа в возвратно-поступательное перемещение ползуна.
1.3 Кинематическая пара – это соединение двух соприкасающихся звеньев, допускающее их относительное движение. В данном механизме 7 кинематических пар. Все они являются низшими (их элементы – поверхности), высшие КП отсутствуют.
В данном механизме это кинематические пары:
| Обозначение
| О1
| А
| В
| О3
| С
| С′
| D
|
| Соединяемые
звенья
| 0-1
| 1-2
| 2-3
| 3-0
| 2-4
| 4-5
| 5-0
|
| Класс
|
|
|
|
|
|
|
|
| Вид
| Вращ.
| Вращ.
| Пост.
| Вращ.
| Вращ.
| Пост.
| Пост.
|
1.4 Число степеней свободы плоского механизма определим по формуле Чебышева

где  – число подвижных звеньев,
– число подвижных звеньев,  – число низших кинематических пар,
– число низших кинематических пар,  – число высших кинематических пар.
– число высших кинематических пар.
В нашем механизме =0, поэтому  3∙5 – 2∙7 = 1, то есть одна обобщенная координата определяет положение всех звеньев механизма. Следовательно, должно быть одно входное звено.
3∙5 – 2∙7 = 1, то есть одна обобщенная координата определяет положение всех звеньев механизма. Следовательно, должно быть одно входное звено.
1.5 Любой механизм может быть образован путем последовательного присоединения к одному или нескольким начальным звеньям и стойке кинематических групп (групп Ассура) с нулевой сетью подвижности относительно тех звеньев, к которым группа присоединяется. Начальное звено – это звено, которому приписывается обобщенная координата. Это звено, образующее со стойкой кинематическую пару 5-го класса.
| 
| 
|
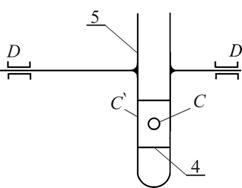
| Рис. 1.2. Группа 4-5
W = 3×2 – 2×3=0.
Класс 2-ой,
порядок 2-ой.
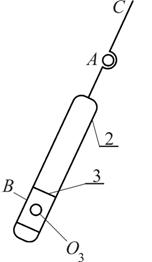
| Рис. 1.3. Группа 2-3
W = 3×1 – 2×1=1
Класс 2-ой,
порядок 2-ой.
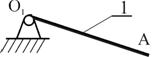
| Рис.1.4.
Начальное звено
Класс 1-ый,
порядок 1-ый
|
Структурная группа не изменяет числа степеней свободы механизма, к которому она присоединяется, то есть  , откуда
, откуда  . Последнее условие выполняется, если = 2,4,6…, а
. Последнее условие выполняется, если = 2,4,6…, а  …. Самая простая структурная группа состоит из двух звеньев и трех кинематических пар (
…. Самая простая структурная группа состоит из двух звеньев и трех кинематических пар (
 ). Это группа называется группой II класса, 2-го порядка. Порядок группы определяется числом свободных кинематических пар, которыми она может присоединяться к механизму.
). Это группа называется группой II класса, 2-го порядка. Порядок группы определяется числом свободных кинематических пар, которыми она может присоединяться к механизму.
Выделим группы Ассура согласно приведенному соотношению и , начиная с наиболее удаленных звеньев от начального звена. Изобразим группы Ассура и начальное звено.
1.6. Предложенный механизм является плоским шарнирно-рычажным механизмом, имеет одну степень свободы, состоит из двух структурных групп и начального звена. Класс механизма определяется наивысшим классом, входящих в него структурных групп. Рассматриваемый механизм – 2-го класса.
1.7. Число избыточных связей определяем по формуле  , где
, где  =1…5, или для заданного механизма
=1…5, или для заданного механизма  .
.
1.8. Устраним избыточные связи, понизив классы кинематических пар. Чтобы обеспечить  , необходимо иметь для плоского механизма соотношение
, необходимо иметь для плоского механизма соотношение
0=1 – 6 +5  +4
+4  +3
+3  , откуда 6 – 1 = 5 +4 +3 . При =5 имеем
, откуда 6 – 1 = 5 +4 +3 . При =5 имеем
5 +4 +3 =29.
Вторым уравнением является условие неизменности числа кинематических пар: + + =7.
Первое равенство должно быть выполнено в механизме без избыточных связей, что обеспечивается =3, =2, =2 и 5×3 + 4×2 + 3 + 2 = 29 или = 4, = 0, = 3 и 5×4 + 4×0 + 3×3 = 29. В обоих случаях число кинематических пар 3 + 2 + 2 = 7 и 4 + 3 = 7.
Более рациональным служит первое соотношение = 3, = 2, = 2.
При понижении класса кинематических пар следует иметь в виду: как правило не понижается класс кинематических пар, образованных подвижными звеньями со стойкой ( ,
,  ) и поступательных пар.
) и поступательных пар.
Понизим класс кинематических пар. Схема соответствующего механизма показана на рис. 1.5.
Примечание. Формальное устранение избыточных связей по уравнениям не всегда гарантирует их конструктивное исполнение. Так, невозможность применения пары 4-го класса в соединении звеньев 4-5 приводит к тому, что в контуре  имеется лишняя степень свободы, тогда в контуре
имеется лишняя степень свободы, тогда в контуре  появляется одна избыточная связь.
появляется одна избыточная связь.
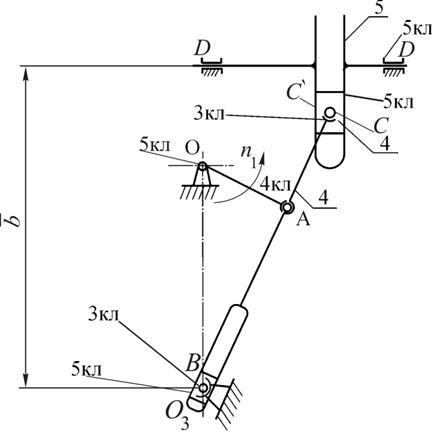
Рис. 1.5. Схема механизма поперечно-строгального






