Remember the following definitions:
Single degree of freedom gyro – гироскоп с одной степенью свободы
Two degree of freedom gyro – гироскоп с двумя степенями свободы
Quadrature axis – поперечная ось
Vertical gyro - гировертикаль, гирогоризонт
Two-Degree-of-Freedom Gyro
The stabilized reference line may be given some particular orientation. If this orientation is up and down along the earth's vertical, and kept that way by means of some kind of plumb bob pendulous reference the device is called a vertical gyro.
If the stabilized reference line is horizontal, the unit is called a directional gyro. A gyro which is free to move about both the inner and the outer gimbal axis, but-where the spin axis has no particular orientation, is called a free gyro.
The general class of units we have been talking about so far covers the two-degree-of-freedom gyros. Their base surface can rotate about two quadrature axes (axes at right angles to each other), the inner gimbal axis and the outer gimbal axis without disturbing the stabilized reference line.
Single-Degree-of-Freedom Gyro
It is also possible to have single-degree-of-freedom gyros. Here, the base surface is rotated about only one axis without disturbing the stabilized reference line. For example, the spin axis is stabilized against rotation around the gimbal axis, but would be disturbed by rotations about the quadrature axis.
There are two special single-degree-of-freedom gyros: the integrating gyro, which measures angular position (somewhat similar to the gyros mentioned thus far); and the rate gyro, which measures rate-of-change of angular position. This rate-of-change of angular position is called angular velocity.
Three-Degree-of-Freedom Gyro
A three-degree-of-freedom gyro can also be built. However, either two two-degree-of-freedom gyros (usually a combination of a vertical gyro and a directional gyro), or three single-degree-of-freedom gyros (usually integrating gyros) are needed. It appears impossible to build a three-degree-of-freedom gyro using only one rotor.
A three-degree-of-freedom system is called a stable platform. Pickoffs of a stable platform measure deviation of the vehicle about three quadrature (mutually perpendicular) axes. These axes form a space stabilized coordinate system. The stable platform will be considered in much more detail in the pages following.
Degree-of-freedom is a common way to classify gyroscopes. But in determining the degree-of-freedom, the freedom to rotate about the spin axis is not counted. For example, on a two-degree-of-freedom gyro, the spin axis (or stabilized reference line) is not disturbed by rotations about the outer or inner gimbal axis. At first glance, it might appear that the spin axis is also not disturbed by rotations about itself. Actually, no stabilization is achieved about the spin axis. We could not, for example, place a pickoff between the inner gimbal and the rotor and be able to read out how much the inner gimbal (or base surface) has rotated about the spin axis. However, a pickoff between the outer gimbal and the base surface will measure base rotation about the outer gimbal axis.
Gyroscopes have also been classified as being instrument or non-instrument units. Generally, instrument gyros are used as transducers or sensors, while non-instrument gyros are used to do work. A vertical gyro is an example of an instrument gyro, and a ship stabilizer is an example of a non-instrument gyro.
Exercises
EX. 1. Check yourself how you remember the words.
a) Translate the phrases:
To spin by pulling a string, to be mounted in, to be used interchangeably, is used to refer to, principal advantage, to point straight up, to determine how…, the gimbal pickoffs, the stabilized reference line, the base surface is rotated…, rate of change, angular position.
b) Finish the following sentences without looking into the text:
· The wheel is usually kept spinning…
· The rotor is mounted …..
· Cardan could not…
· If the stabilized reference line is horizontal….
· Degree of freedom is a common way…
EX.2. Summarize the subject matter of the texts (A and B) with the help of the following table.
GYRO CLASSIFICATIONS:
 Single-Degree-Of-Freedom Single-Degree-Of-Freedom
  DEGREES OF FREEDOM Two-Degree-Of-Freedom
Three-Degree-Of-Freedom
OR DEGREES OF FREEDOM Two-Degree-Of-Freedom
Three-Degree-Of-Freedom
OR
 Instrument Gyro
Transducer or Sensor Instrument Gyro
Transducer or Sensor
 USE
Non-Instrument Gyro
Direct Stabilization
OR USE
Non-Instrument Gyro
Direct Stabilization
OR
 Amount or Displacement Amount or Displacement
 WHAT IS MEASURED
Rate or Angular Velocity WHAT IS MEASURED
Rate or Angular Velocity
|
EX.3. Questions and problems to be revised.
1. Name three ways in which a gyro motor might be driven.
2. Name the principal parts of a gyroscope.
3. What is the chief advantage of a gyroscope?
4. Explain base motion isolation.
5. What does a pickoff on a gyro measure?
6. How can a gyroscope be used to demonstrate that the earth is rotating?
7. What are some of the different kinds of gyros?
8. What does degree-of -freedom mean with respect to gyros?
9. What is the degree-of-freedom of each of the following gyros: Vertical? Directional? Rate? Integrating?
Unit 2 How the gyro works.
Essential vocabulary
Angular veloсity,n - угловая скорость
Magnitude,n - величина, размеры.
Torque,n - момент кручения, скручивающее усилие
Thumb,n - большой палец руки.
Assume,v - принимать, предполагать, допускать
Advance,v - продвигаться, идти вперед.
Hitch-hike,v - путешествовать бесплатно
Wrap,v - обертывать, завертывать.
Counterclockwise -против движения часовой стрелки.
Conversely - обратно, наоборот
Text 2A. Vectors and Scalars
Read the text and define the following terms
vector; spin vector; scalar torque vector.
In order to answer this question, let us start with vectors. As you recall, a vector represents a physical quantity which has both magnitude(how much) and direction(which way). For example, the vector velocity has both magnitude (say 50 mi/hr) and direction (say North). By comparison, scalar quantity has only magnitude. Speed is a scalar quantity which has a magnitude (mi/hr) but does not have an associated direction.
Two factors are helpful in explaining the action of a gyro. First, there is the spin vector. The spin vector, an angular velocity, describes the way in which the gyro rotor rotates. The magnitude of the spin vector is measured in rad/sec, deg/sec, rev/min, etc.
The direction of the spin vector is found by wrapping the fingers of the right hand in the direction of spin rotation. Now, if the thumb assumes the usual hitch-hiking position, it points in the direction of the spin vector.
Consider the case where the spin motor is rotating counterclockwise when viewed from above. Wrapping the fingers of the right hand around the gyro in the direction of the spin, the thumb points up. Therefore, the spin vector points up. On the other hand, if the spin motor were rotating clockwise when viewed from above, the spin vector would point down.
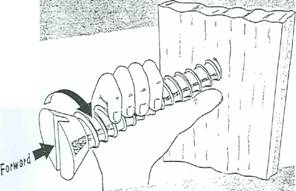 THE RIGHT HAND SCREW RULE
THE RIGHT HAND SCREW RULE
|
This method of determining vector direction is known as the right hand screw rule. Imagine a wooden screw with a right hand thread—that is, where the thread spirals to the right from head to tip when viewed from the head end. The vector direction is the direction the screw would advance if the head were rotated in a clockwise direction when viewed from the head end.
Second, there is the torque vector. Torque is a force which tends to produce rotation or twisting. The magnitude of the torque is measured in dyne-centimeters, ounce-inches, pound-feet, etc. The amount of torque is found by multiplying the amount of force times the length which is the shortest distance between the force and what would be the axis of rotation. This shortest distance is called the moment arm. Assume that the force is 20 lbs and the moment arm is 4 ft long. Then the torque being exerted is 20 lbs 4 ft 80 lb-ft or
F* L =T
Where F= force, L= moment arm, and T= torque.
Torque being exerted= length.





