Пространственная система сходящихся сил
Система сил, линии действия которых расположены в различных плоскостях, называется пространственной системой сил.
Пространственная система сил называется сходящейся, если линии действия всех сил системы пересекаются в одной точке.
Теорема: пространственная система сходящихся сил эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих сил.
Пусть дана пространственная система n сходящихся сил (F1, F2, F3,....Fn). На основании следствия из аксиом III и IV перенесем все силы системы вдоль линий действия в точку их пересечения. Затем на основании аксиомы параллелограмма последовательно сложим все силы и получим их равнодействующую:
FΣ = F1 + F2 + F3 +....+ Fn, или FΣ = ΣFi.
Силовой многоугольник пространственной системы сил не лежит в одной плоскости, поэтому геометрический и графический способы нахождения равнодействующей пространственной системы сходящихся сил неприемлемы, а применяется только аналитический способ (метод проекций).
Проекция силы на ось в пространстве находится по проецирующим перпендикулярам, и может быть определена при помощи тригонометрических функций. При определении проекций сил пространственной системы потребуется система координат с осями X, Y, Z, поскольку силы системы не располагаются в одной плоскости.
Правило знаков для проекций будет таким же, как и для плоской системы сил – совпадающие по направлению с координатной осью силы считаются положительными, в противном случае – отрицательными. Если вектор силы параллелен какой-либо оси координат, то он проецируется на эту ось в натуральную величину, если же вектор перпендикулярен оси, его проекция на эту ось будет равна нулю.
***
Аналитические условия равновесия пространственной системы сходящихся сил
Известно, что пространственная система сходящихся сил эквивалентна равнодействующей. Если такая система сил находится в равновесии, т. е. эквивалентна нулю, то можно сделать вывод, что равнодействующая этой системы равна нулю, а следовательно, и проекции равнодействующей тоже равны нулю, причем эти проекции равны сумме проекций составляющих.
Отсюда вытекают условия равновесия пространственной системы сходящихся сил:
ΣX = 0; ΣY = 0; ΣZ = 0.
Эти условия формируются следующим образом: для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил на каждую их трех координатных осей равнялась нулю.
***
Примеры решения задач
ПРИМЕР 1
| Задание
| Два шара массами 3 и 5 кг скреплены стержнем, масса которого 2 кг. Определить положение общего центра масс системы, если радиус первого шара 5 см, радиус второго шара 7 см, а длина стержня 30 см.
|
| Решение
| Выполним рисунок.
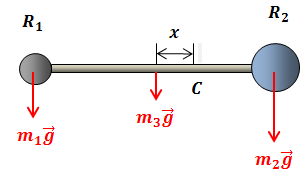 Запишем условие равновесия системы относительно оси, проходящей через ее центр масс Моменты, созданные силами тяжести:Подставим значения моментов в условие равновесия:Переведем единицы в систему СИ: см м; см м.
Запишем условие равновесия системы относительно оси, проходящей через ее центр масс Моменты, созданные силами тяжести:Подставим значения моментов в условие равновесия:Переведем единицы в систему СИ: см м; см м.  Вычислим: Вычислим:
|
| Ответ
| Центр тяжести системы находится на расстоянии 5 см от середины стержня в сторону большего шара.
|

ВЕРНУТЬСЯ
 Сложное движение точки (тела) – такое движение, при котором точка (тело) одновременно участвует в нескольких движениях (напр. пассажир, перемещающийся по движущемуся вагону). В этом случае вводится подвижная система координат (Oxyz), которая совершает заданное движение относительно неподвижной (основной) системы координат (O1x1y1z1). Абсолютным движением точки назыв. движение по отношению к неподвижной системе координат. Относительное движение – движение по отношению к подвижной системе коорд. (движение по вагону). Переносное движение – движение подвижной сист. координат относительно неподвижной (движение вагона). Теорема о сложении скоростей: Сложное движение точки (тела) – такое движение, при котором точка (тело) одновременно участвует в нескольких движениях (напр. пассажир, перемещающийся по движущемуся вагону). В этом случае вводится подвижная система координат (Oxyz), которая совершает заданное движение относительно неподвижной (основной) системы координат (O1x1y1z1). Абсолютным движением точки назыв. движение по отношению к неподвижной системе координат. Относительное движение – движение по отношению к подвижной системе коорд. (движение по вагону). Переносное движение – движение подвижной сист. координат относительно неподвижной (движение вагона). Теорема о сложении скоростей:  , ,  ; ;  -орты (единичные вектора) подвижной системы координат, орт вращается вокруг мгновенной оси, поэтому скорость его конца -орты (единичные вектора) подвижной системы координат, орт вращается вокруг мгновенной оси, поэтому скорость его конца  и т.д., Þ: и т.д., Þ:  , ,
 ; ;  – относительная скорость. – относительная скорость.
 ; переносная скорость: ; переносная скорость:  , поэтому абсолютная скорость точки = геометрической сумме ее переносной (ve) и относительной (vr) скоростей , поэтому абсолютная скорость точки = геометрической сумме ее переносной (ve) и относительной (vr) скоростей  , модуль: , модуль:  . Теорема о сложении ускорений (теорема Кориолиса): . Теорема о сложении ускорений (теорема Кориолиса): 
 и т.д. Слагаемые выражения, определяющего ускорения и т.д. Слагаемые выражения, определяющего ускорения  : 1) : 1)  – ускорение полюса О;
2) – ускорение полюса О;
2)  3)
3)  – относительное ускорение точки;
4) – относительное ускорение точки;
4)  ,
получаем: ,
получаем:  . .
 Первые три слагаемых представляют собой ускорение точки в переносном движении: Первые три слагаемых представляют собой ускорение точки в переносном движении:  – ускорение полюса О; – ускорение полюса О;  – вращательное уск., – вращательное уск.,  – осестремительное уск., т.е. – осестремительное уск., т.е.  . Теорема о сложении ускорений (теорема Кориолиса): . Теорема о сложении ускорений (теорема Кориолиса):  , где , где  – ускорение Кориолиса (кориолисово ускорение) – в случае непоступательного переносного движения абсолютное ускорение = геометрической сумме переносного, относительного и кориолисова ускорений. Кориолисово ускорение характеризует: 1) изменение модуля и направления переносной скорости точки из-за ее относительного движения; 2) изменение направления относительной скорости точки из-за вращательного переносного движения. Модуль ускорения Кориолиса: ас= 2×|we×vr|×sin(we^vr), направление вектора – ускорение Кориолиса (кориолисово ускорение) – в случае непоступательного переносного движения абсолютное ускорение = геометрической сумме переносного, относительного и кориолисова ускорений. Кориолисово ускорение характеризует: 1) изменение модуля и направления переносной скорости точки из-за ее относительного движения; 2) изменение направления относительной скорости точки из-за вращательного переносного движения. Модуль ускорения Кориолиса: ас= 2×|we×vr|×sin(we^vr), направление вектора  определяется по правилу векторного произведения, или по правилу Жуковского: проекцию относительной скорости на плоскость, перпендикулярную переносной угловой скорости, надо повернуть на 90о в направлении вращения. определяется по правилу векторного произведения, или по правилу Жуковского: проекцию относительной скорости на плоскость, перпендикулярную переносной угловой скорости, надо повернуть на 90о в направлении вращения.
 Кориолисово уск. = 0 в трех случаях: 1) we=0, т.е. в случае поступательного переносного движения или в момент обращения угл. скорости в 0; 2) vr=0; 3) sin(we^vr)=0, т.е. Ð(we^vr)=0, когда относительная скорость vr параллельна оси переносного вращения. В случае движения в одной плоскости – угол между vr и вектором we = 90о, sin90o=1, ас=2×we×vr.
Сложное движение твердого тела Кориолисово уск. = 0 в трех случаях: 1) we=0, т.е. в случае поступательного переносного движения или в момент обращения угл. скорости в 0; 2) vr=0; 3) sin(we^vr)=0, т.е. Ð(we^vr)=0, когда относительная скорость vr параллельна оси переносного вращения. В случае движения в одной плоскости – угол между vr и вектором we = 90о, sin90o=1, ас=2×we×vr.
Сложное движение твердого тела
 При сложении двух поступательных движений результирующее движение также является поступательным и скорость результирующего движения равна сумме скоростей составляющих движений. Сложение вращений тв. тела вокруг пересекающихся осей. Ось вращения, положение которой в пространстве изменяется со временем назыв. мгновенной осью вращения тела. Вектор угловой скорости – скользящий вектор, направленный вдоль мгновенной оси вращения. Абсолютная угловая скорость тела = геометрической сумме скоростей составляющих вращений – правило параллелограмма угловых скоростей. При сложении двух поступательных движений результирующее движение также является поступательным и скорость результирующего движения равна сумме скоростей составляющих движений. Сложение вращений тв. тела вокруг пересекающихся осей. Ось вращения, положение которой в пространстве изменяется со временем назыв. мгновенной осью вращения тела. Вектор угловой скорости – скользящий вектор, направленный вдоль мгновенной оси вращения. Абсолютная угловая скорость тела = геометрической сумме скоростей составляющих вращений – правило параллелограмма угловых скоростей.
  . Если тело участвует одновременно в мгновенных вращениях вокруг нескольких осей, пересекающихся в одной точке, то . Если тело участвует одновременно в мгновенных вращениях вокруг нескольких осей, пересекающихся в одной точке, то
 . При сферическом движении твердого тела, одна из точек которого во все время движения остается неподвижной, имеем уравнения сферического движения: Y=f1(t); q=f2(t); j=f3(t). Y – угол прецессии, q – угол нутации, j – угол собственного вращения — углы Эйлера. Угловая скорость прецессии . При сферическом движении твердого тела, одна из точек которого во все время движения остается неподвижной, имеем уравнения сферического движения: Y=f1(t); q=f2(t); j=f3(t). Y – угол прецессии, q – угол нутации, j – угол собственного вращения — углы Эйлера. Угловая скорость прецессии  , угл. скорость нутации , угл. скорость нутации  , угл. ск. собственного вращения , угл. ск. собственного вращения  . .  , ,
 – модуль угловой скорости тела вокруг мгновенной оси. Через проекции на неподвижные оси координат: – модуль угловой скорости тела вокруг мгновенной оси. Через проекции на неподвижные оси координат:  – кинематические уравнения Эйлера. Сложение вращений вокруг 2-х параллельных осей.
1) – кинематические уравнения Эйлера. Сложение вращений вокруг 2-х параллельных осей.
1)  Вращения направлены в одну сторону. w=w2+w1, С – мгновенный центр скоростей и через нее проходит мгновенная ось вращения, Вращения направлены в одну сторону. w=w2+w1, С – мгновенный центр скоростей и через нее проходит мгновенная ось вращения,  , ,  . 2) Вращения направлены в разные стороны. . 2) Вращения направлены в разные стороны.  , w=w2—w1 , w=w2—w1
   С – мгн. центр ск. и мгн. ось вращения, . Векторы угловых скоростей при вращении вокруг ||-ых осей складываются так же, как векторы параллельных сил. 3) Пара вращений – вращения вокруг ||-ных осей направлены в разные стороны и угловые скорости по модулю равны ( С – мгн. центр ск. и мгн. ось вращения, . Векторы угловых скоростей при вращении вокруг ||-ых осей складываются так же, как векторы параллельных сил. 3) Пара вращений – вращения вокруг ||-ных осей направлены в разные стороны и угловые скорости по модулю равны (  – пара угловых скоростей). В этом случае vA=vB, результирующее движение тела – поступательное (или мгновенное поступательное) движение со скоростью v=w1×AB – момент пары угловых скоростей (поступательное движение педали велосипеда относит-но рамы). Мгн. центр скоростей находится в бесконечности. Сложение поступательного и вращательного движений. 1) Скорость поступательного движения ^ к оси вращения – плоскопараллельное движение – мгновенное вращение вокруг оси Рр с угловой скоростью w=w'.
2) Винтовое движение – движение тела слагается из вращательного движения вокруг оси Аа с угл.ск. w и поступательного со скоростью v||Аа. Ось Аа – ось винта. Если v и w в одну сторону, то винт – правый, если в разные – левый. Расстояние, проходимое за время одного оборота любой точкой тела, лежащей на оси винта, наз. шагом винта – h. Если v и w постоянны, то h= – пара угловых скоростей). В этом случае vA=vB, результирующее движение тела – поступательное (или мгновенное поступательное) движение со скоростью v=w1×AB – момент пары угловых скоростей (поступательное движение педали велосипеда относит-но рамы). Мгн. центр скоростей находится в бесконечности. Сложение поступательного и вращательного движений. 1) Скорость поступательного движения ^ к оси вращения – плоскопараллельное движение – мгновенное вращение вокруг оси Рр с угловой скоростью w=w'.
2) Винтовое движение – движение тела слагается из вращательного движения вокруг оси Аа с угл.ск. w и поступательного со скоростью v||Аа. Ось Аа – ось винта. Если v и w в одну сторону, то винт – правый, если в разные – левый. Расстояние, проходимое за время одного оборота любой точкой тела, лежащей на оси винта, наз. шагом винта – h. Если v и w постоянны, то h=  =const, при постоянном шаге любая (×)М, не лежащая на оси винта описывает винтовую линию. =const, при постоянном шаге любая (×)М, не лежащая на оси винта описывает винтовую линию.  направлена по касательной к винтовой линии.
3) Скорость поступательного движения образует произвольный угол с осью вращения, в этом случае движение можно рассматривать как слагающееся из серии мгновенных винтовых движений, вокруг непрерывно изменяющихся винтовых осей – мгновенно–винтовое движение. направлена по касательной к винтовой линии.
3) Скорость поступательного движения образует произвольный угол с осью вращения, в этом случае движение можно рассматривать как слагающееся из серии мгновенных винтовых движений, вокруг непрерывно изменяющихся винтовых осей – мгновенно–винтовое движение.
|
Иметь представление о свободных и несвободных материальных точках, о силах инерции, об использовании силы инерции для решения технических задач.
Знать формулы для расчета силы инерции при поступательном и вращательном движениях, знать принцип Даламбера и уметь определять параметры движения с использованием законов динамики и метода кинетостатики.
Сила инерции
Инертность — способность сохранять свое состояние неизменным, это внутреннее свойство всех материальных тел.
Сила инерции — сила, возникающая при разгоне или торможении тела (материальной точки) и направленная в обратную сторону от ускорения. Силу инерции можно измерить, она приложена к «связям» — телам, связанным с разгоняющимся или тормозящимся телом.
Рассчитано, что сила инерции равна

Разгоняющееся тело (платформа с массой т) силу инерции не воспринимает, иначе разгон платформы вообще был бы невозможен.
При вращательном движении (криволинейном) возникающее ускорение принято представлять в виде двух составляющих: нормального an и касательного at.
Поэтому при рассмотрении криволинейного движения могут возникнуть две составляющие силы инерции: нормальная и касательная a = at + ап;


При равномерном движении по дуге всегда возникает нормальное ускорение, касательное ускорение равно нулю, поэтому действует только нормальная составляющая силы инерции, направленная по радиусу из центра дуги.
ω =const;

Принцип кинетостатики (принцип Даламбера)
Принцип кинетостатики используют для упрощения решения ряда технических задач.
Реально силы инерции приложены к телам, связанным с разгоняющимся телом (к связям).
Даламбер предложил условно прикладывать силу инерции к активно разгоняющемуся телу. Тогда система сил, приложенных к материальной точке, становится уравновешенной, и можно при решении задач динамики использовать уравнения статики.
Принцип Даламбера:
Материальная точка под действием активных сил, реакций связей и условно приложенной силы инерции находится в равновесии:

Рис.9.3. Коническая фрикционная передача
2. По взаимному расположению осей валов:
- цилиндрические или конусные с параллельными осями (рис.9.1, 9.2);
- конические с пересекающимися осями (рис.9.3).
3. В зависимости от условий работы:
- открытые (работают всухую);
- закрытые (работают в масляной ванне).
В открытых фрикционных передачах коэффициент трения  выше, прижимное усилие катков Fn меньше. В закрытых фрикционных передачах масляная ванна обеспечивает хороший отвод тепла, делает скольжение менее опасным, увеличивает долговечность передачи.
выше, прижимное усилие катков Fn меньше. В закрытых фрикционных передачах масляная ванна обеспечивает хороший отвод тепла, делает скольжение менее опасным, увеличивает долговечность передачи.
4. По принципу действия:
- нереверсивные (рис.9.1-9.3);
- реверсивные.
5. Различают также передачи с постоянным или автоматическим регулируемым прижатием катков, с промежуточным (паразитным) фрикционным элементом или без него.
Достоинства фрикционных передач:
- простота конструкции и обслуживания;
- плавность передачи движения и регулирования скорости и бесшумность работы;
- большие кинематические возможности (преобразование вращательного движения в поступательное, бесступенчатое изменение скорости, возможность реверсирования на ходу, включение и выключение передачи на ходу без остановки);
- за счет возможностей пробуксовки передача обладает предохранительными свойствами. Однако после пробуксовки передача, как правило, резко ухудшает свои качества - появляются лыски на катках, неравномерно срабатываются фрикционные поверхности и т.д. Поэтому использовать пробуксовку как предохранительное средство не рекомендуется;
- отсутствие мёртвого хода при реверсе передачи;
- равномерность вращения, что удобно для приборов;
- возможность бесступенчатого регулирования передаточного числа, причем на ходу, без остановки передачи.
Недостатки фрикционных передач:
- непостоянство передаточного числа из-за проскальзывания;
- незначительная передаваемая мощность (открытые передачи - до 10-20 кВт; закрытые - до 200-300 кВт);
- для открытых передач сравнительно низкий КПД;
- большое и неравномерное изнашивание катков при буксовании;
- необходимость применения опор валов специальной конструкции с прижимными устройствами (это делает передачу громоздкой);
- для силовых открытых передач незначительная окружная скорость ( 7 - 10 м/с);
7 - 10 м/с);
- большие нагрузки на валы и подшипники от прижимной силы  , что увеличивает их размеры и делает передачу громоздкой. Этот недостаток ограничивает величину передаваемой мощности;
, что увеличивает их размеры и делает передачу громоздкой. Этот недостаток ограничивает величину передаваемой мощности;
- большие потери на трение.
Применение.
Фрикционные передачи с нерегулируемым передаточным числом в машиностроении применяются сравнительно редко, например, во фрикционных прессах, молотах, лебедках, буровой технике и т.п.). В качестве силовых передач они громоздки и малонадежны. Эти передачи применяются преимущественно в приборах, где требуется плавность и бесшумность работы (магнитофоны, проигрыватели, спидометры и т. п.). Они уступают зубчатым передачам в несущей способности. Зато фрикционные передачи с бесступенчатым регулированием скорости – вариаторы – широко применяются в различных машинах, например, в металлорежущих станках, в текстильных и транспортирующих машинах и т. д. Зубчатые передачи не позволяют такого регулирования. На практике широко применяют реверсивные фрикционные передачи винтовых прессов, передачи колесо — рельс и колесо — дорожное полотно самоходного транспорта. Фрикционные передачи предназначены для мощностей, не превышающих 20 кВт, окружная скорость катков допускается до 25 м/с.
Рис.9.4. Геометрические параметры фрикционных передач
Передаточное число.
Если допустить, что во фрикционной передаче скольжение отсутствует, то окружные скорости катков будут равны, т. е.  . Для передачи, показанной на рис.1:
. Для передачи, показанной на рис.1:
 ;
;  .
.
Приравнивая правые части равенств, получим  или
или  . Отсюда
. Отсюда
 ,
,
где  — передаточное число.
— передаточное число.
В действительности скольжение между катками есть, т. е.  . Величина скольжения оценивается коэффициентом скольжения
. Величина скольжения оценивается коэффициентом скольжения  ;
;  = 0,005 ÷ 0,03 (здесь
= 0,005 ÷ 0,03 (здесь  — теоретическая угловая скорость).
— теоретическая угловая скорость).
Передаточное отношение фрикционной передачи с учетом скольжения

Для передачи движения между валами с пересекающимися осями используют коническую фрикционную передачу. Угол  между осями валов обычно составляет 900. В этом случае передаточное отношениебез учета скольжения
между осями валов обычно составляет 900. В этом случае передаточное отношениебез учета скольжения
 .
.
КПД фрикционных передач зависит от следующих потерь:
- связанных с использованием катков, имеющих формы, не позволяющие им перекатываться один по другому без проскальзывания; это отчетливо видно, например, в передаче с клиновыми катками и лобовом вариаторе;
- проскальзывания, обусловленного масляной пленкой на рабочих поверхностях и т. д.;
- трения качения, вызванного деформацией поверхностей катков в зоне контакта;
- в подшипниках. Потери в подшипниках зависят от величины нагрузки на валы, которая определяется прижимным усилием F  .
.
КПД фрикционной передачи определяют по формуле

где  — сумма относительных потерь.
— сумма относительных потерь.
Для закрытых фрикционных передач  = 0,88 – 0,93, для открытых = 0,68 – 0,86.
= 0,88 – 0,93, для открытых = 0,68 – 0,86.
Рис.9.5. Катки клинчатой передачи

а) б) в)
Рис.9.6. Типы катков: a — гладкие катки:
б — выпуклые катки: в — выпукло-вогнутые катки
Геометрические параметры передачи (см. рис. 9.4).
Межосевое расстояние
 .
.
Диаметр ведущего катка
 .
.
Диаметр ведомого катка
 .
.
Рабочая ширина обода катка
 ,
,
где  = 0,2 - 0,4 — коэффициент ширины обода катка по межосевому расстоянию.
= 0,2 - 0,4 — коэффициент ширины обода катка по межосевому расстоянию.
Для компенсации неточности монтажа на практике ширину малого катка (см. рис.9.1) принимают, мм:
 .
.
Силы в передаче.
Для обеспечения работоспособности фрикционных передач необходимо прижать катки (см. рис.9.4) силой нажатия  таким образом, чтобы соблюдалось условие (1), т. е.
таким образом, чтобы соблюдалось условие (1), т. е.

где  — максимальная сила трения;
— максимальная сила трения;  — передаваемая окружная сила; — коэффициент трения (выбирается по табл.1). Отсюда сила нажатия
— передаваемая окружная сила; — коэффициент трения (выбирается по табл.1). Отсюда сила нажатия  или
или
 , (2)
, (2)
где  — коэффициент запаса сцепления; вводится для предупреждения пробуксовки от перегрузок в период пуска передачи (для силовых передач = 1,25 - 1,5; для передач приборов = 3 - 5).
— коэффициент запаса сцепления; вводится для предупреждения пробуксовки от перегрузок в период пуска передачи (для силовых передач = 1,25 - 1,5; для передач приборов = 3 - 5).
По схеме, показанной на рис.9.4,
 . (3)
. (3)
Подставив формулу (3) в формулу (2), определим силу нажатия
 .
.
На практике применяют два способа прижатия катков: постоянной силой и автоматическое. Постоянная по значению прижимная сила катков допустима при передаче постоянной нагрузки. При переменной нагрузке прижатие катков должно изменяться автоматически — пропорционально изменению передаваемого вращающего момента. В этом случае снижаются потери на трение, повышается долговечность передачи.
В первом случае сила прижатия, осуществляемая обычно с помощью пружин, в процессе paботы изменена быть не может; во втором случае сила прижатия изменяется с изменением нагрузки, что положительно, сказывается на качественных характеристиках передачи. Однако применение специальных нажимных устройств (например, шариковое самозатягивающее устройство) усложняет конструкцию.
Один каток к другому может быть прижат:
- предварительно затянутыми пружинами (в передачах, предназначенных для работы при небольших нагрузках);
- гидроцилиндрами (при передаче больших нагрузок);
- собственной массой машины или узла;
- через систему рычагов с помощью перечисленных выше средств;
- центробежной силой (в случае сложного движения катков в планетарных системах).
Пространственная система сходящихся сил
Система сил, линии действия которых расположены в различных плоскостях, называется пространственной системой сил.
Пространственная система сил называется сходящейся, если линии действия всех сил системы пересекаются в одной точке.
Теорема: пространственная система сходящихся сил эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих сил.
Пусть дана пространственная система n сходящихся сил (F1, F2, F3,....Fn). На основании следствия из аксиом III и IV перенесем все силы системы вдоль линий действия в точку их пересечения. Затем на основании аксиомы параллелограмма последовательно сложим все силы и получим их равнодействующую:
FΣ = F1 + F2 + F3 +....+ Fn, или FΣ = ΣFi.
Силовой многоугольник пространственной системы сил не лежит в одной плоскости, поэтому геометрический и графический способы нахождения равнодействующей пространственной системы сходящихся сил неприемлемы, а применяется только аналитический способ (метод проекций).
Проекция силы на ось в пространстве находится по проецирующим перпендикулярам, и может быть определена при помощи тригонометрических функций. При определении проекций сил пространственной системы потребуется система координат с осями X, Y, Z, поскольку силы системы не располагаются в одной плоскости.
Правило знаков для проекций будет таким же, как и для плоской системы сил – совпадающие по направлению с координатной осью силы считаются положительными, в противном случае – отрицательными. Если вектор силы параллелен какой-либо оси координат, то он проецируется на эту ось в натуральную величину, если же вектор перпендикулярен оси, его проекция на эту ось будет равна нулю.
***








