Глава 4. КАССЕТНЫЕ ДЕРЖАТЕЛИ
Кассетными держателями (КД) называют держатели, конструктивно выполненные в виде силовой рамы и позволяющие размещать несколько авиационных подвешиваемых изделий одно над другим. Кассетные держатели, как правило, используются только при внутреннем размещении АПИ на ЛА и рассчитаны, на подвеску одновременно нескольких АПИ.
Также как и балочные держатели, кассетные держатели делятся на весовые группы, определяемые по наибольшему весу каждого из подвешиваемых АПИ.
Весовая группа и конструктивная схема КД, а также тип ЛА, для которого он разработан, обозначаются в его названии. Например, обозначение кассетного держателя КД3-840 означает, «кассетный держатель третьей весовой группы, предназначенный для подвески восьми АПИ на самолёт А-40».
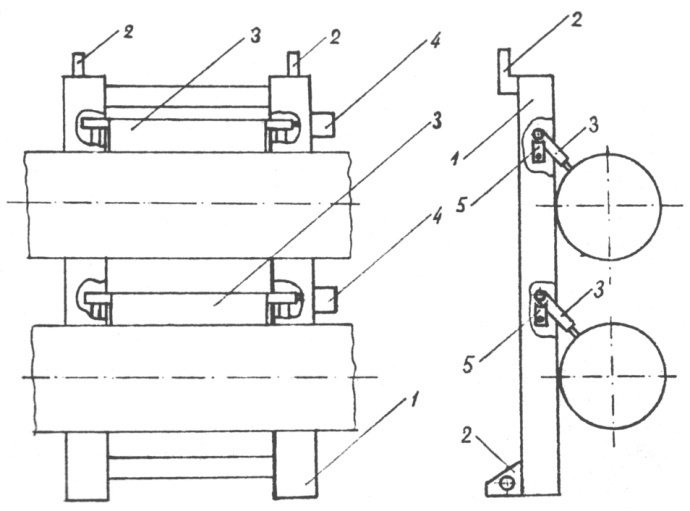
Рис. 4.1. Структурная схема КД:
1 – рама; 2 – узлы крепления к ЛА; 3 – замок; 4 – привод замка; 5 – узлы крепления замка к КД
Структурная схема кассетного держателя приведена на рис. 4.1. В состав кассетного держателя входят: силовой элемент (1) в виде рамы; узлы крепления (2) силового элемента к ЛА; механизм отделения (3) – замок; привод (4) замка (привод бомбодержателя - ПБД); узлы крепления (5) замка к кассетному держателю в виде защёлок; механизм «взрыв-невзрыв» (МВН) (6) для управления взрывателями с механическим взведением и блокировочная коробка (БК) (7). Замок, ПБД, МВН и БК составляют станцию кассетного держателя.
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К КД
Помимо основных технических требований, предъявляемых к УБВ и изложенных в разделе 1.2 настоящего пособия, к КД, могут предъявляться следующие специфические технические требования:
Количество станций должно обеспечивать максимальную загрузку КД по грузоподъёмности в различных вариантах подвески ЛА.
КД, устанавливаемые в грузоотсеках гидросамолётов, должны обеспечивать загрузку их АПИ сверху и снизу.
КД, подвеска которых на ЛА производится в загруженном состоянии, должны обеспечивать:
- надёжное крепление АПИ и сбрасывание их в соответствии с характером боевой задачи, выполняемой ЛА;
- автономную проверку работоспособности агрегатов КД вне ЛА;
- удобную его загрузку (снятие) АПИ с КД вне ЛА;
- возможность производить изменение отдельных параметров без снятия АПИ с КД;
- удобство транспортирования аэродромными средствами, а также подвески (снятия) снаряженных КД на ЛА;
- возможность использования для подвески авиабомб, буев, и других боеприпасов.
Для обеспечения снятия с КД АПИ вместе с замками кассетные держатели должны иметь систему группового управления (отдельно для передних и задних узлов подвески).
Расчековка парашютных систем АПИ должна производиться после отделения АПИ, при этом должно исключаться попадание вытяжных строп (тросов и т.п.) на агрегаты КД, торцы створок грузового отсека или захлёстывание подвешенных АПИ.
ЗАМКИ КД
На кассетных держателях применяются замки съёмного типа, силовая и кинематическая схемы которых были рассмотрены в главе 2.
Конструкция наиболее распространённых замков съёмного типа первой (КД1-1838) и третьей (Дер3-54Д) весовой групп, применяемых в КД, приведена ниже при рассмотрении КД3-840 и КД1-1627.
Замок КД1-1838, выполненный по типу съёмных, не снимаются с КД при загрузке АПИ, так как, учитывая небольшой вес подвешиваемых АПИ (в основном не более 16 кг), загрузка происходит на земле вне ЛА вручную и в грузовой отсек ЛА устанавливают уже загруженный КД.
ПРИВОДЫ ЗАМКОВ КД
В КД для открывания замков использовались механические, пиротехнические и электромеханические приводы.
Механические приводы применялись на ранних этапах развития КД при наличии на них небольшого числа станций.
Пиротехнические приводы широко применялись как до, так и во время Великой Отечественной войны (они были основным видом приводов, так как имели малые габариты и время срабатывания, относительно простую конструкцию и давали большое усилие на штыре для открывания замка).
Однако, из-за слабого развития пиротехники в довоенный период, пиротехнические приводы не были достаточно надёжны. Также требовалось значительное время для обслуживания пиротехнических приводов – перед каждым полётом нужно было закладывать новые пиропатроны, а каналы пороховых газов прочищать. Это заставило конструкторов перейти на электромеханические приводы.
Следующим шагом в развитии приводов КД была замена пироэлектрических механизмов открывания замков на электромеханические с помощью ПБД-44 или ПБД-45. Переход к электромеханическому управлению был событием значительным:
- исключалась необходимость в снабжении войсковых частей
пиропатронами;
- существенно сокращалось время на подготовку бомбардировочного вооружения к боевому вылету за счёт исключения необходимости разборки, чистки и последующей сборки пиропистолетов;
- упрощались изучение и эксплуатация бомбардировочного вооружения за унификации приводов и других элементов типовой системы бомбардировочного вооружения на всех бомбодержателях;
- обеспечивалась высокая степень безотказности бомбардировочного вооружения и т.д.
КД с электромеханическим управлением замками, разработанные в 1944 году отличались от предшествующих разработок тем, что обеспечивали возможность подвески авиабомб как второй, так и третьей группы на держатель КДЗ.
МЕХАНИЗМЫ УПРАВЛЕНИЯ АПИ
Конструкция механизмов управления АПИ обусловлена типом взрывателя (механическим или пиротехническим), установленным на АПИ.
Управление взведением механических взрывателей АПИ осуществляется механизмом управления АКТИВ-ПАССИВ, входящим в замок КД, и электромагнитным механизмом МВН-48М, конструкция и работа которых показана ниже при рассмотрении КД3-840.
Появление на вооружении электрических взрывателей обусловило разработку специальных механизмов подачи электрических импульсов на электровзрыватель - МПИ. Особенностью МПИ является то, что импульс должен быть подан только после физического отделения АПИ от замка, кроме того, импульс должен длиться не менее 0.006 с.
Электрический взрыватель связан с МПИ электрическим жгутом, который заканчивается шариком. По экватору шарика вмонтировано металлическое кольцо шириной около 3 мм. Шарик жгута вставляется в отверстие корпуса и удерживается в гнезде пружиной. При сбрасывании АПИ шарик электрического жгута скользит по колодке корпуса МПИ и по токопроводящей пластине контактной колодки. Кольцо шарика связано с ''плюсом'' взрывателя, ''минус'' взрывателя соединяется через металлическую ножку шарика с корпусом МПИ. Если токопроводящая пластина будет под напряжением, то на взрыватель АПИ поступит электрический импульс для его взведения. Преодолевая механическое сопротивление предохранительной скобы, шарик выходит из корпуса МПИ.
В кассетных держателях, для обеспечения возможности применения эшелонированных по вертикали АПИ с электрическими взрывателями, на КД или рядом с КД в отсеке ЛА (в зависимости от длины подвешиваемых АПИ) устанавливается групповой механизм управления взрывателями, называемый пусковым устройством (ПУ). Шарики взрывателей в строгой последовательности (в соответствии с расположением АПИ) заводятся в отверстия трубы ПУ в верхней её части, где удерживаются.
В нижней части трубы ПУ имеется контактная пластина, по
которой при сбрасывании АПИ шарики скользят и получают электрический импульс.
КАССЕТНЫЙ ДЕРЖАТЕЛЬ КД3-840
Назначение
Кассетный держатель КД3-840 предназначен для внутренней подвески на ЛА, подвески, транспортирования и сбрасывания АПИ массой до 500 кг, а также для подвески и применения кассетного держателя КД1-1040.
Технические данные
Подвеска КД на ЛА и АПИ на КД осуществляется комплектом средств обслуживания ЛА. КД и замки легкосъемны, надежны, просты по конструкции, безопасны и удобны при техническом обслуживании, не требуют высокой квалификации обслуживающего персонала и работоспособны при эксплуатации в режимах, соответствующих режимам ЛА. Управление сбрасыванием АПИ с КД осуществляется по двум автономным системам управления – тактической и аварийной. Тактическая система управления рассчитана на питание от бортовых источников ЛА постоянным напряжением 27  В, аварийная система управления от аварийных источников питания ЛА – постоянным напряжением не менее 18В.
В, аварийная система управления от аварийных источников питания ЛА – постоянным напряжением не менее 18В.
Габаритные размеры КД 764х282х2270 мм.
Масса КД (без замков и съемных элементов) не более 75 кг.
Устройство
Кассетный держатель КД3-840 (рис. 4.14) представляет собой жесткую металлическую раму, которая состоит из двух вертикальных силовых балок, представляющих собой прессованные дюралевые профили, окантованные накладками из листовой стали и соединенные дюралевыми поперечинами и листом. На раме смонтировано восемь типовых станций для подвески замков с изделиями. Каждая станция подвески состоит из двух групп защелок (передней и задней) для крепления в них замка, привода (2), механизма МВН-48М (7) и блокировочной коробки БК-48МВ (4).

Рис. 4.14. Кассетный держатель КД3-840:
1,11 – узел крепления КД; 2 – привод; 3 – балка; 4 – блокировочная коробка БК-48МВ; 5 – узел подъема; 6 – ручка управления защелками; 7, 9 – механизм МВН-48М; 8 – поперечина; 10 – узел подвески; 12 – шпилька; 13, 16, 18, 29 – пружина; 14 – валик; 15, 21, 23 – тяга; 17 – собачка; 19, 24 – рычаг; 20, 25 – ось; 22 – муфта; 26 – обойма; 27 – фиксатор; 28 – ручка; «а» – выемка; «б» – выступ; «в» – выступ; «г» – выступ; «д» – выступ
КД на ЛА крепится быстросъемными шпильками за два узла.
Каждая группа защелок на каждой станции подвески имеет механическую сигнализацию (рис. 4.15) об открытом и закрытом положении защелок. При открытом положении защелок сигнальный штырь (1) выступает за плоскость балки, при закрытом – не выступает.
Управление открыванием и закрыванием защелок осуществляется механизмами управления защелками, управляющими раздельно передней и задней группами защелок.
Управление сбрасыванием АПИ с КД осуществляется двумя системами управления – тактической и аварийной. При монтаже (демонтаже) на ЛА кассетный держатель КД3-840 поднимается (опускается) с помощью подъемных средств, входящих в систему подъема АПИ ЛА.
Поверхности КД окрашены эмалью ХВ-16 серо-голубого цвета, эксплуатационные надписи и знаки – эмалью ХВ-130 красного цвета. Конструкция кассетного держателя обеспечивает доступ к отдельным узлам и механизмам без демонтажа других каких-либо его элементов.
Механизм защелок
Механизм защелок предназначен для удержания замка с подвешенным изделием на станции. Механизм защелок КД состоит из четырех механизмов защелок станций. Механизм защелок станции представляет собой два аналогичных механизма, смонтированных на передней и задней балке, каждый из которых состоит из защелки «собачки» (17) (см. рис. 4.14.), установленной в пазу защелки на одной оси с нею и соединенной с защелкой пружиной (16), и упора, в прорези которого установлена пружина (18), удерживающая его в положении, соответствующем изображенному на рис. 4.12. Собачка (17) верхним плечом опирается на выступ «д» упора, а нижним плечом через валик (14) опирается на тягу (15) механизма управления защелками и удерживается в положении, изображенном на рис. 4.12, пружиной (13), закрепленной одним концом за валик (14), а другим – за штифт, установленный на балке. Механизм имеет два положения: закрытое и открытое. В закрытом положении он удерживает замок от перемещений. При этом цапфа замка от перемещения вниз удерживается защелкой, в выемке «а» которой она расположена, а от перемещения вверх – упором. При закрытом положении защелок производится загрузка станций КД. Замок подводится к механизму со стороны защелки, утапливает ее своей цапфой за рейку. Защелка поворачивает собачку, которая своим выступом утапливает упор за рейку, в результате чего цапфа замка беспрепятственно проходит станцию, после чего под действием пружин (13), (16), (18) защелка, собачка и упор возвращаются в исходное положение. Замок может быть далее приведен к следующим станциям или установлен на данной. Для установки на данную станцию замок, после того как он прошел станцию на 6 мм, возвращается и его цапфа фиксируется от дальнейшего перемещения вниз на выемке «а» защелки, при этом упор, возвращаясь в исходное положение, препятствует своим выступом перемещению цапфы вверх.
Разгрузка кассетного держателя производится при открытом положении защелок, в которое он переводится при перемещении тяги (15) вниз (при КД, установленном на ЛА), тяга через валик вращает собачку (17), которая своим плечом утапливает упор за рейку и через пружину (16) вращает защелку, утапливая ее за рейку, если на станции нет замка. Если при переводе механизма защелок в открытое положение на станции зафиксирован замок, то защелка остается в закрытом положении и для ее перевода в открытое положение необходимо приподнять замок на 6-8 мм, после чего цапфа замка освободит защелку, которая утапливается за рейку, освобождая желоб кассетного держателя для перемещения цапфы замка. При открытом положении замка упор своим выступом воздействует на ролик механизма сигнализации защелок.
Замок
Замок Дер3-54Д (рис. 4.16) предназначен для подвески и сбрасывания АПИ калибром 50, 100, 250 и 500 кг.
Замок управляется приводом ПБД-59 и механизмом МВН-48М.
Масса замка 3,1кг.
Замок состоит из обоймы (3), внутри которой размещен механизм управления сбрасыванием и механизм управления АКТИВ- ПАССИВ. По торцам обоймы вварены передняя (1) и задняя (8) бобышки с цапфами, при помощи которых замок подвешивается в защелки КД. В верхней части обоймы имеется кронштейн (5), предназначенный для подъема замка с АПИ при помощи крюка подъема. В верхней части обоймы приварена скоба (2), предшествующая подвеске замка в неправильном, перевернутом на 1800 относительно направления полета положении. Выемки (две крайние) в нижней части обоймы предназначены для размещения ушков АПИ калибром 250 и 500 кг, средняя – для ушка АПИ калибром до 100 кг и четвертая – для размещения кольца прутка управления устройствами срабатывания АПИ. Передний (11) и задний (9) ухваты, закрепленные в нижней части обоймы, предотвращают раскачивание подвешенных АПИ, имеющих одно подвесное ушко. Смотровые окна (10) и (12) в обойме предназначены для визуальной проверки надежности зацепления рычагов механизма замка. В отверстие (6) вставляется шпилька (13), запирающая спусковой рычаг (4). Шпилька вставляется только перед подвеской изделий и вынимается перед полетом. На обойме замка, рядом с отверстием, прикреплена этикетка (7) с надписью ШПИЛЬКА.
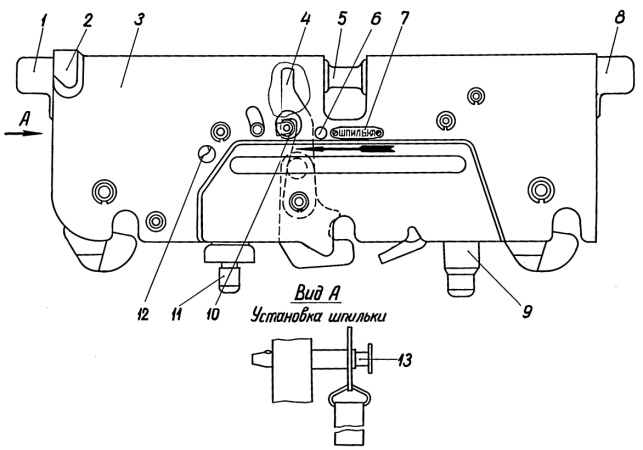
Рис. 4.16. Замок Дер3-54Д:
1 – передняя бобышка с цапфой; 2 – скоба; 3 – обойма; 4 – спусковой рычаг; 5 – кронштейн; 6 – отверстие; 7 – этикетка; 8 – задняя бобышка с цапфой; 9 – задний ухват; 10, 12 – смотровое окно; 11 – передний ухват; 13 – шпилька
Механизм управления сбрасыванием (рис. 4.17) состоит из переднего несущего рычага (1), заднего несущего рычага (10) и среднего несущего рычага (17), соединенных тягой (18), спускового рычага (5), переходного рычага (4), штыря сбрасывания (3) с пружиной (2), рычага-противовеса (6). Передний несущий рычаг (1) имеет на нижнем плече зев для ушка АПИ, а на верхнем – площадку, при помощи которой несущий рычаг входит в зацепление с переходным рычагом (4) и удерживает несущие рычаги (1), (17) и (10), соединенные тягой (18), в закрытом положении. Спусковой рычаг (5) головкой входит в прямоугольный паз штыря сбрасывания (3). Нижнее плечо рычага (5) соединяется с осью среднего несущего рычага, в средней части имеется площадка для зацепления с роликом переходного рычага (4). Переходной рычаг (4) нижнем плечом входит в зацепление с передним несущим рычагом (1). На верхнем плече рычага (4) закреплен ролик. В средней части рычага (4) запрессован штифт, выступающий своими концами за плоскость обоймы и служащий для поворота переходного рычага при закрывании замка. Штырь сбрасывания представляет собой круглый стержень с прямоугольным пазом. Пружина (2) возвращает штырь в исходное положение. Рычаг – противовес (6) служит для предотвращения открывания замка от инерционных сил, действующих на него.
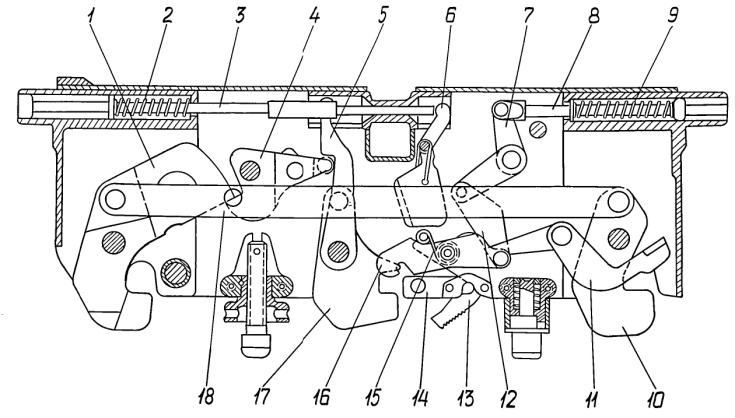
Рис. 4.17. Замок Дер3-54Д. Механизм управления сбрасыванием:
1 – передний несущий рычаг; 2 – пружина штыря сбрасывания; 3 – штырь сбрасывания; 4 – переходной рычаг; 5 – спусковой рычаг; 6 – рычаг-противовес; 7 – рычаг; 8 – штырь АКТИВ-ПАССИВ; 9 – пружина штыря АКТИВ-ПАССИВ; 10 – задний несущий рычаг; 11, 16 – следящий рычаг; 12 – коромысло;13 – рычаг АКТИВ-ПАССИВ; 14 – упор;15 – пружина рычага АКТИВ-ПАССИВ; 17 – средний несущий рычаг; 18 – тяга
Механизм управления АКТИВ-ПАССИВ и сигнализации состоит из: следящего рычага (16), коромысла (12), рычага (7), штыря АКТИВ-ПАССИВ (8) с пружиной (9), рычага АКТИВ-ПАССИВ (13) с пружиной (15), следящего рычага (11), упора (14). Следящий рычаг (16) одним плечом опирается на ушко одноушкового АПИ. Другое ушко рычага (16) соединено с коромыслом (12) при помощи валика, на который опирается плечо следящего рычага (11). Второе плечо рычага (11) опирается на ушко двухушкового АПИ, подвешенного на крайние несущие рычаги. Между пластинами рычага (16) вварен валик, на который своим плечом опирается рычаг АКТИВ-ПАССИВ, закрепленный на одной оси с рычагом (16). Рычаг (7) верхним плечом соединен со штырем АКТИВ-ПАССИВ (8), а нижним – с коромыслом (12). На штырь (8) надета пружина (9), которая стремится выжать его из цапфы замка. Упор (14) устраняет выползание ушка АПИ весом 50 или 100 кг со среднего несущего рычага в закрытом замке.
Привод
Привод (рис. 4.18) предназначен для механического открывания кинематики замка, установленного на станцию КД, от импульса электрического тока, поступающего на обмотку электромагнита, а также для коммутации электрических цепей тактического и аварийного управления.
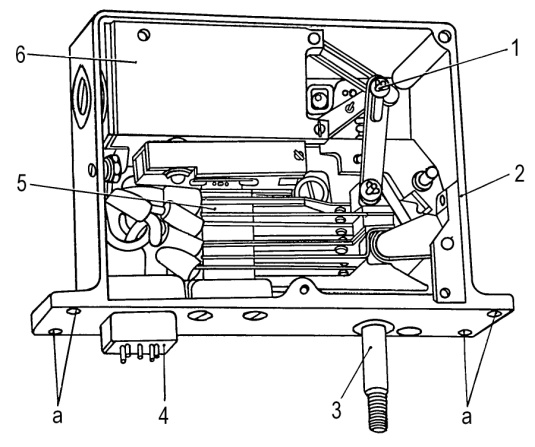
Рис. 4.18. Привод. Общий вид:
1 – система рычагов; 2 – корпус; 3 – штырь сбрасывания; 4 – электрический соединитель; 5 – колодка контактная; 6 – электромагнит; «а» - отверстия под болты крепления
Приводы изготавливаются правыми и левыми, имеющими зеркально отраженную компоновку механизмов и узлов. Однотипные приводы взаимозаменяемы. Приводы рассчитаны на питание постоянным током напряжением 27 В по цепям тактического управления и не менее 18В – по цепям аварийного управления. Усилие, развиваемое штырем привода в конце хода, не менее 14 кг. Габаритные размеры 130х100х47 мм, масса до 1,15 кг.
Привод состоит из корпуса (2), внутри которого размещены электромагнит (6), контактная колодка (5), система рычагов (1) и электрический соединитель (4). Корпус закрыт крышкой, на которой укреплены трафарет электрической схемы привода с надписью ПРАВЫЙ или ЛЕВЫЙ и резиновая прокладка. Крышка крепится винтами. В основании корпуса имеются отверстия для выхода штыря сбрасывания (3) и электрического соединителя (4) и четыре отверстия «а» для крепления привода к КД. На резьбовую часть штыря навинчен наконечник.
Кинематическая схема привода приведена на рис. 4.19. С лицевой стороны корпуса выступает ось «а» ведущего рычага (3) с пазом на торце под ключ для взвода. Когда привод взведен, этот паз совпадает с рисками (на корпусе), около которых имеется стрелка и надпись ВЗВЕДЕН.
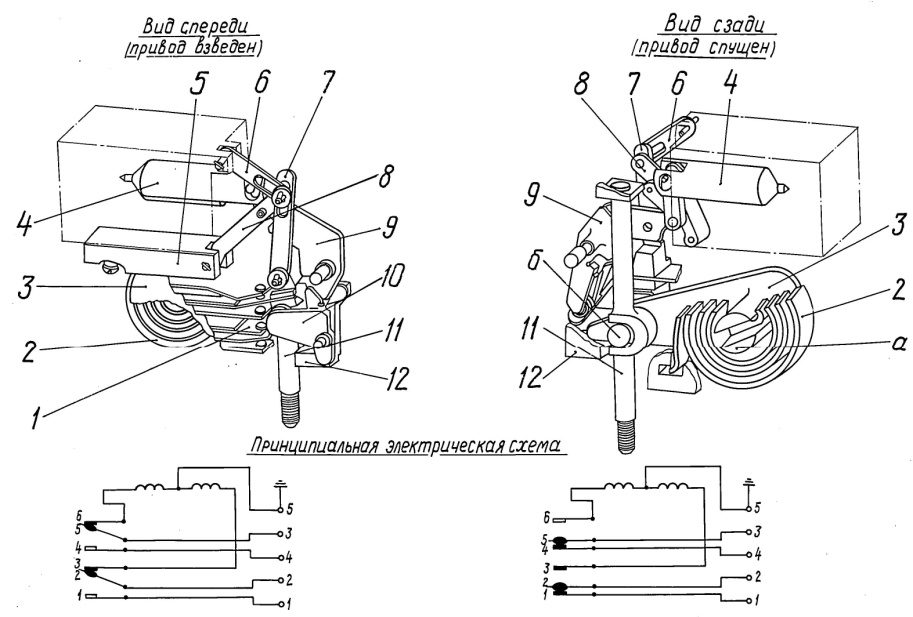
Рис. 4.19. Привод. Кинематическая и принципиальная
электрическая схемы:
1 – контакты тактического и аварийного управления; 2 – боевая пружина; 3 – ведущий рычаг; 4 – якорь электромагнита; 5 – противовес; 6 – тяга; 7 – тяга переключения контактов; 8 – спусковой рычаг; 9 – передний рычаг; 10 – рычаг переключения контактов; 11 – штырь сбрасывания; 12 – зуб ведущего рычага; «а» – ось ведущего рычага; «б» – выступ ведущего рычага
Тяга (6) шарнирно закреплена к корпусу электромагнита и соединена с одним плечом спускового четырехплечего рычага (8), фиксируя его в исходном положении; два других плеча присоединены к якорю (4) и противовесу (5).
Переходный рычаг (9) шарнирно закреплен на оси к корпусу привода. Одно плечо рычага опирается на ролик, сидящий на четвертом плече спускового рычага, а другое плечо входит в зацепление с зубом ведущего рычага (3). Переходной и спусковой рычаги удерживают ведущий рычаг в исходном (взведенном) положении. Ведущий рычаг (3) имеет ось «а», которая проходит через кожух боевой пружины и лицевую стенку корпуса привода. На оси укреплена втулка, удерживающая ее от осевых перемещений. В пазу оси закреплен внутренний конец пружины (2), а наружный конец ее упирается в гнездо, закрепленное к корпусу привода. Ведущий рычаг цилиндрическим выступом входит в зацепление со штырем сбрасывания (11), один конец которого через сальник выходит наружу из корпуса, а второй удерживается во втулке направляющей скобы. Выход штыря ограничивается буфером (12), воспринимающим удар ведущего рычага при срабатывании привода. Рычаг переключения контактов (10) вращается на оси, закрепленной к корпусу привода, и служит для переключения контактов колодки. При взведении привода рычаг зубом воздействует на плечо рычага (10), поворачивает его и удерживает в повернутом положении. При этом второе плечо рычага (10) поджимает контакт (5) (см. электрическую схему рис. 4.19) тактического управления к контакту (6), а контакт (2) аварийного управления – к контакту (3). Контактная колодка имеет также контакты (4) и (1), подключающие после сбрасывания привода электрические цепи соответственно тактического и аварийного управления к следующему приводу.
Привод включается в электрическую систему КД через пятиштырьковую штепсельную вилку (4) (см. рис. 4.18). Электромагнит (рис. 4.20) служит для преобразования электрического импульса постоянного тока в механическое переключение якоря (2). В корпусе (3) размещены две обмотки: обмотка (5) тактического и (4) аварийного управления, якорь (2), пружина якоря (6) и стоп (7). На корпусе электромагнита шарнирно винтом с шайбой закреплен противовес (1), служащий противовесом перемещению якоря при воздействии на него инерционных перегрузок вдоль оси якоря. При втягивании в электромагнит противовес перемещается параллельно якорю, скользя пазом во втулке и шайбе винта его крепления. Привод взводится поворотом оси «а» ведущего рычага (рис. 4.19) ключом, вставленным в паз оси, в направлении стрелки на корпусе привода. При этом ведущий рычаг поворачивается и взводит боевую пружину. Зуб ведущего рычага средней частью входит в вырез переходного рычага и, нажимая на верхнюю грань выреза, поворачивает рычаг.
Одновременно зуб ведущего рычага верхней кромкой поворачивает и поджимает рычаг переключения контактов, замыкая контакты (5) и (6), (2) и (3). Переходной рычаг нажимает на ролик спускового рычага.
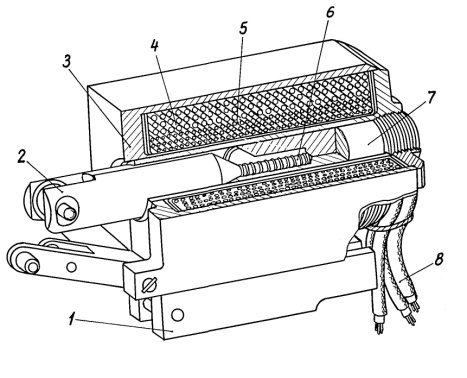
Рис. 4.20. Привод. Электромагнит:
1 – противовес; 2 – якорь электромагнита; 3 – корпус электромагнита; 4 – обмотка аварийного управления; 5 – обмотка тактического управления; 6 – пружина якоря; 7 – стоп; 8 – жгут электропроводов
Спусковой рычаг, поворачиваясь, утапливает якорь электромагнита и пропускает носик переходного рычага за ролик, после чего якорь и спусковой рычаг под воздействием возвратной пружины электромагнита становятся в исходное положение, запирая носик переходного рычага на ролике (положение ролика на опорной поверхности переходного рычага определяется тягой (6). Зуб ведущего рычага опирается на нижнюю грань выреза переходного рычага. Механизм привода взведен.
Механизм МВН-48М
Электромагнитный механизм МВН-48М (рис. 4.21) предназначен для управления устройствами управления сбрасыванием АПИ, подвешенных на КД, с целью сбрасывания их на АКТИВ или ПАССИВ, сигнализации АПИ на КД.
Напряжение питания - 27 В. Минимальное напряжение срабатывания - 16В.
Механизм МВН-48М состоит из электромагнита с подпружиненным рычагом (17) (рис. 4.21), подпружиненного штока (8), переключателя (2) и пружины (21) с роликом (19), смонтированных в корпусе (1) с крышкой (23). Крышка удерживается на корпусе тремя винтами и тремя болтами (16), которые служат и для крепления механизма МВН-48М на кассетном держателе. Внутри корпуса (на дне) закреплен электрический соединитель (4). С нижней стороны на дне корпуса (1) установлены две пластмассовые колодки (11) и (12) с семью гнездами (25). Колодки являются ответной частью электрического соединителя механизма МВН-48М и служат для подключения в электрическую схему КД.
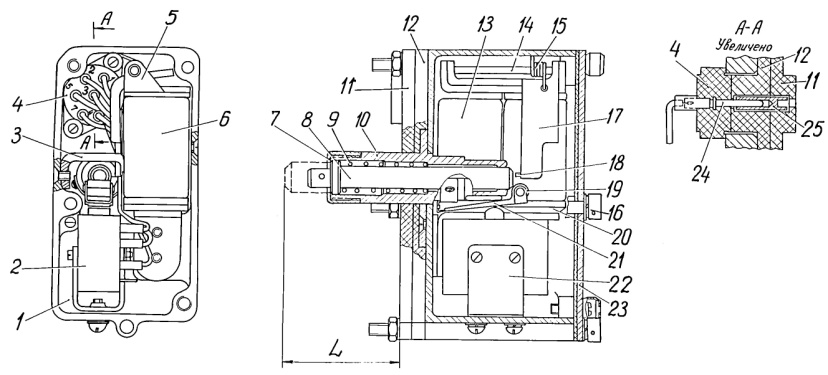
Рис. 4.21. Механизм МВН-48М:
1- корпус; 2 – переключатель; 3 – упор; 4 – электрический соединитель; 5, 22 – кронштейн; 6, 13 – катушка; 7 – гайка; 8 – шток; 9, 15, 21 – пружина; 10 – втулка; 11, 12 – колодка; 14 – ось; 16 – болт; 17 – рычаг; 18 – цилиндрический выступ; 19 – ролик; 20 – пластина; 23 – крышка;24 – штырь; 25 – гнездо
Электромагнит МВН-48М.7200-40, являющийся составной частью устройства ограничения движения штока механизма МВН-48М, состоит из двух катушек (6) и (13) с сердечниками. На каркасе катушек закреплен кронштейн с осью (14), на которой шарнирно крепится подпружиненный рычаг (17). Рычаг (17) имеет Г-образную форму. Короткое плечо рычага, расположенное против сердечников, является якорем электромагнита и при обесточенных катушках (6) и (13) оттягивается от сердечников пружиной (15). Длинное плечо рычага (17), имеющее на конце цилиндрический выступ (18), располагается вдоль катушек электромагнита и при срабатывании последнего ограничивает ход штока (8). Шток (8), с помощью которого осуществляется срабатывание механизма на АКТИВ и ПАССИВ, сигнализация о наличии АПИ на КД, установлен во втулке (10), фланец которой закреплен на дне корпуса (1). Во втулке (10) шток (8) удерживается гайкой (7), а от утапливания в корпус (1) – пружиной (9). В торце хвостовика штока (8) имеется гнездо (углубление) под цилиндрический выступ (18) рычага (17). В кромку штока упирается ролик (19) пружины (21), воздействующей на кнопку переключателя (2), установленного на кронштейне (22) корпуса. Для предотвращения деформации рычага (17) от удара штоком (8) на стенке корпуса (1) закреплен упор (3).
Блок квитанций КД1-1040
Блок квитанций КД1-1040.8405 (рис. 4.23) предназначен для выдачи сигналов на ЛА о номерах АПИ, сброшенных конкретно с каждой станции подвески КД. Блок квитанций состоит из закрытого крышкой дюралевого корпуса, в котором размещен (и закреплен) монтаж электрической схемы. На крышке блока квитанций размещена электрическая схема блока, которая включает в себя:
- двадцать электромагнитных реле КVI – KV20 (РЭС-49);
- двадцать диодов VДI – VД20 (2Д102А);
- одну вилку СНО49-38/44х36В-6-В.
С КД блок квитанций стыкуется электрическим соединителем.

Рис. 4.23. Блок квитанций. Внешний вид
Электрическая схема КД
Электрическая схема предназначена для управления сбрасыванием АПИ с КД и сигнализации о наличии АПИ на КД.
В электрическую схему входят элементы, приведенные в табл. 4.1.
Принципиальная электрическая схема КД, приведенная на рис. 4.24, показана в положении, когда приводы взведены, а замки установлены.
Электрическая схема обеспечивает:
- раздельное независимое управление сбрасыванием АПИ по тактической и аварийной системам;
- отключение тактических цепей сбрасыванием тех станций, на которые не установлены замки;
- отключение цепей сбрасывания с верхних станций до сбрасывания АПИ с нижней станции;
- сигнализацию о наличии АПИ на каждой станции и КД;
- подключение питания к соответствующим станциям только после открывания замка, установленного на соответствующей станции КД.
Таблица 4.1
| Обозначение позиций
| Наименование и тип
| Коли-чество
|
| А1
SQ1…SQ8 XP1
XS1…XS8
XS9…XS15
XS16
XS17
У1…У8
У9…У15
У16
| Блок квитанций
Блокировочная коробка БК-48МВ
Электрический соединитель
Электрический соединитель
Штепсельная колодка ШК-МВ левая
Штепсельная колодка ШК-МВ правая
Электрический соединитель
Механизм МВН
Привод правый
Привод левый
|
|

Рис. 4.24. Принципиальная электрическая схема держателя КД3-840
Работа КД
Работа КД состоит в сбросе АПИ по тактической и аварийной электрическим цепям управления, а также в передаче соответствующих сигналов при срабатывании станций от блока квитанций.
Работа при подготовке КД к подвеске АПИ
Выключить защелки установкой ручек управления защелками в положение ОТКР, при этом штыри сигнализации должны выйти за профили балок. Взвести приводы, при этом штыри приводов должны убраться за профили балок, контакты (3), (2) – замкнуться, а контакты (1), (4) – разомкнуться. Снять замки с КД и установить их на АПИ. Включить защелки переводом ручек управления защелками в положение ЗАКР, при этом штыри сигнализации положения защелок должны убраться за профили балок.
Назначение
Кассетный держатель предназначен для подвески, транспортирования и сбрасывания до 16 АПИ массой до 16 кг.
Основные технические данные
При транспортировании АПИ, подвешенных на КД, в отсеке ЛА должна поддерживаться температура от 5 до 400С.
Снаряжение кассетного держателя АПИ производится вручную вне ЛА, причем правая и левая составные части его снаряжаются раздельно, с последующей стыковкой и соединением их между собой с помощью кронштейнов и легкосъемных шпилек.
Транспортирование снаряженного КД до ЛА обеспечивается средствами наземного оборудования или корабельными средствами.
Подъем (спуск) КД при монтаже (демонтаже) его на ЛА (с ЛА) осуществляется с помощью подъемных средств ЛА.
Управление сбрасыванием АПИ с кассетного держателя производится по двум автономным цепям управления (тактической и аварийной) дистанционно с ЛА путём подачи команд на открытие замков с помощью ПБД.
Кассетный держатель обеспечивает:
- подвеску и применение АПИ, шт. ……………………………...16
- время срабатывания системы ПРИВОД-ЗАМОК, с……...…0,025
- длительность импульса, выдаваемого
с контактного устройства рейки
на шариковую вилку ЭПУ АПИ, с....……..............................0,010
- усилие прохождения шариковой
вилки ЭПУ по контактному устройству рейки, Н………….10-90
- усилие схода шариковой вилки ЭПУ
с предохранительной пружины рейки, Н …………..……20-100
Масса держателя, кг ……………………………….........не более 65
КД надежно работает в следующих условиях:
- при рабочем напряжении постоянного тока в
тактических цепях сбрасывания, В…………………………......27
- при рабочем напряжении постоянного тока в
аварийных цепях сбрасывания, В……………………………18-31
- при температуре окружающей среды, °С …………………....± 60
- при пониженном атмосферном давлении, мм рт.ст............до 350
- при относительной влажности, %………………………...100, при
температуре +35±2 °С и
нормальном атмосферном
давлении
КД обладает коррозионной стойкостью в условиях воздействия соляного (морского) тумана.
КД допускает возможность проведения дезактивации и дегазации.
КД сохраняет работоспособность без проведения проверки после нахождения внутри ЛА в загруженном состоянии до 30 суток, а также после выполнения 10 посадок с подвешенными АПИ.
Контроль работоспособности КД производится в неснаряженном состоянии с помощью пульта контроля.
Устройство
Кассетный держатель рамного типа КД1-1627 (рис. 4.25 – главный вид; 4.26 – вид слева; 4.27 – вид сверху) состоит из двух составных частей: правой (28) и левой (29), соединяемых и скрепляемых между собой с помощью двух пар кронштейнов (23) и легкосъемных шпилек (25).
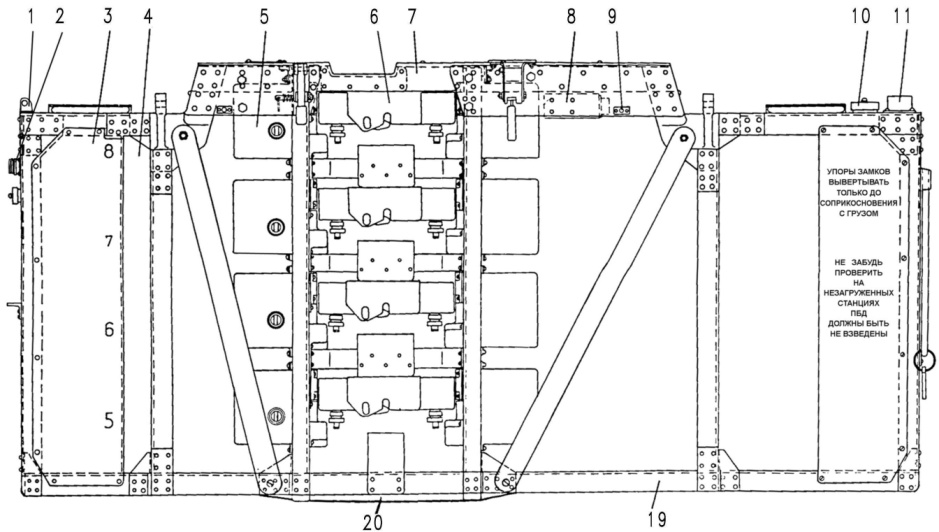
Рис. 4.25. Кассетный держатель КД1-1627. Главный вид
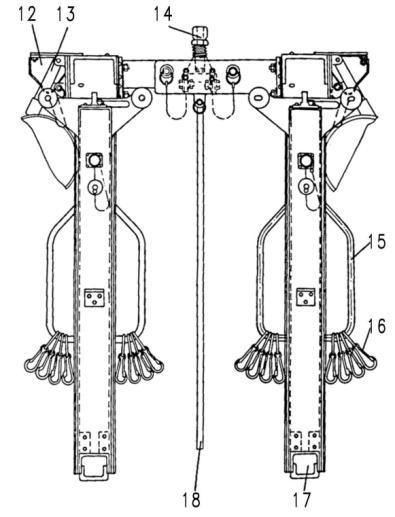
Рис. 4.26. Кассетный держатель КД1-1627. Вид слева
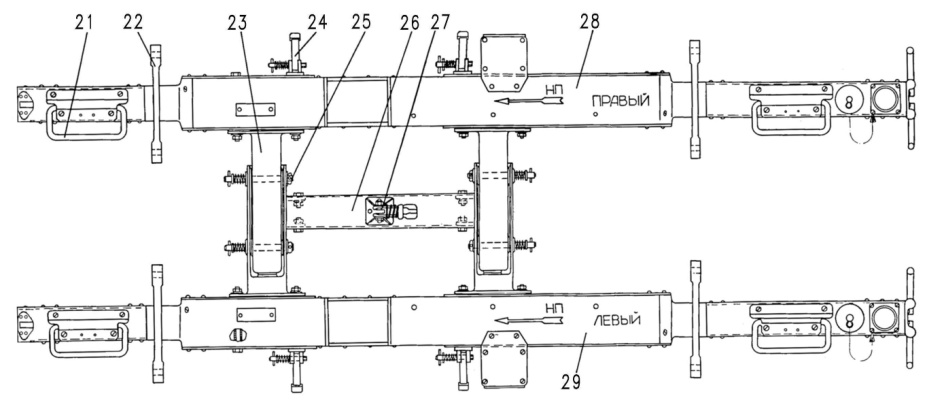
Рис. 4.27. Кассетный держатель КД1-1627. Вид сверху
Подрисуночный текст к рис. 4.25, 4.26, 4.27:
1-рейка; 2-электросоединитель; 3-лист; 4-поперечный профиль; 4а-стяжка рамы; 5-привод ПБД; 6-замок; 7-верхняя балка; 8-блок квитанций; 9-заглушка электрического соединителя; 10-электрический соединитель; 11-блок сигнализации; 12-ограничитель (упор); 13-муфта; 14-фалодержа-тель; 15-карабин с кольцами; 16-нижняя балка; 17-направляющая; 18-рама держателя; 19-рейка; 20-шпилька крепления рейки; 21-ручка; 22-кронштейн крепления траверсы; 23-кронштейн стыковки; 24-ограничитель (упор); 25-шпилька стыковочного узла; 26-стяжка; 27-муфта; 28-правая часть КД; 29-левая часть КД
Правая часть КД является зеркальным отражением левой его части по расположению станций подвески АПИ. Каждая составная часть КД представляет собой раму (18), состоящую из двух продольных силовых профилированных балок: верхней (7) и нижней (16), и шести поперечных профилей (4). Верхние балки имеют передний и задний выгибы, на которых установлены кронштейны крепления траверс (22), необходимых для стыковки КД с ЛА, и ручки (21) для переноса КД. На задних выгибах установлены электрический соединитель (10) для подключения к ЛА. На передних торцах рам предусмотрена установка реек (1) (они устанавливаются в случае применения АПИ, снаряженных электропиротехническими устройствами взведения). Здесь же установлены электрические соединители (2) для подключения реек к КД. На задних сторонах рам установлены фалодержатели (14) с карабинами и кольцами (15) для присоединения фал парашютов АПИ. На стяжке (26) сверху крепится болтами муфта подъема (27), служащая для подсоединения троса системы подъема АПИ при монтаже КД на ЛА.
Снизу к кронштейнам с помощью легкосъемных шпилек крепятся две направляющие (17). К внешним боковым сторонам верхних балок крепятся по два откидных упора (ограничителя) (12). Направляющие и ограничители служат для исключения возможности раскачивания подвешенных АПИ и соударения их при транспортировании и сбрасывании с КД.
В правой и левой частях КД смонтированы по восемь станций подвески АПИ: по четыре – во внутренних отсеках и по четыре – во внешних. На верхних балках обеих рам установлены блоки сигнализации (11) и блоки квитанций (8). Блоки электрической системы каждой составной части КД соединены проводами, собранными в жгуты, которые проложены внутри балок. Электрические схемы составных частей КД между собой не соединены.
Конструкция
КД (см. рис. 4.25, 4.26, 4.27) конструктивно выполнен в виде двух силовых рам (18), соединяемых между собой перед подвеской его на ЛА. В собранном виде держатель крепится к ЛА с помощью четырех кронштейнов (22), смонтированных на верхних силовых балках КД, и двух траверс. Для обеспечения соединения траверс с КД на кронштейнах левой составной части КД имеются четыре круглых отверстия, а на кронштейнах правой его части – четыре эллипсных отверстия.
Для подвески АПИ на КД на каждой его составной части имеется по восемь станций (с № 1 по № 8): на правой составной части – четыре станции в левом (внутреннем) отсеке (с № 1 по № 4) и четыре станции в правом (внешнем) отсеке (с № 5 по №8); на левой составной части – четыре станции в правом (внутреннем) отсеке (с № 1 по № 4) и четыре станции в левом (внешнем) отсеке (с № 5 по № 8).
По всей конструкции станции подвески аналогичны.
Станция представляет собой несъемный замок (6) для подвески и фиксации АПИ и





