Пример энергетической машины.
3. Электродвигатель.
Пример технологической машины.
4. Токарно-винторезный станок.
Пример транспортной машины.
5. Вертолет.
Такая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого звена цепи все остальные звенья совершают однозначно определяемые движения.
1. Механизм.
Твердое тело, которое входит в состав механизма и представляет собой деталь или совокупность деталей, не имеющих между собой относительного движения.
1. Звено.
Соединение двух соприкасающихся звеньев, допускающее их относительное движение.
2. Кинематическая пара.
Связанная система звеньев, образующих между собой кинематические пары.
3. Кинематическая цепь.
Кинематическая цепь, в которой есть звенья, входящие только в одну кинематическую пару.
4. Незамкнутая кинематическая цепь.
Кинематическая цепь, каждое звено которой входит, по меньшей мере, в две кинематические пары.
5. Замкнутая кинематическая цепь.
Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару.
1. Элемент кинематической пары.
12.) Звено, которому сообщается движение (от двигателя или другого механизма), преобразуемое данным механизмом в требуемое движение выходного звена.
2. Входное звено.
Звено, совершающее движение, для которого предназначен механизм.
3. Выходное звено.
Звено, для которого сумма элементарных работ всех приложенных к нему сил положительна.
4. Ведущее звено.
Звено, для которого сумма элементарных работ всех приложенных к нему внешних сил отрицательна или равна нулю.
5. Ведомое звено.
Звенья, которым приписываются обобщенные координаты механизма.
1. Начальные звенья.
Механизм, все подвижные точки которого движутся в параллельных плоскостях.
2. Плоский механизм.
Зависимость между числом подвижностей (степеней свободы) и числом связей в кинематической паре.
2.  .
.
Зависимость между числом связей и числом подвижностей (степеней свободы) в кинематической паре.
3.  .
.
Звенья, соединенные высшей кинематической парой.
 4. Звенья 1 и 5.
4. Звенья 1 и 5.
Как могут соприкасаться между собой звенья, образующие низшую кинематическую пару?
5. По поверхности.
Как могут соприкасаться между собой звенья, образующие высшую кинематическую пару?
1. По линии или в точке.
Кинематическая цепь, конструктивно заменяющая в механизме кинематическую пару.
2. Кинематическое соединение
43.) Структурная формула для пространственной кинематической цепи без избыточных связей (формулу Сомова - Малышева).
3.  .
.
44.) Структурная формула для плоской кинематической цепи без избыточных связей (формулу Чебышева).
4.  .
.
Число избыточных связей в пространственном механизме.
5.  .
.
Число пассивных звеньев в схеме тройного щарнирного параллелограмма.
 q=2
q=2
Укажите тип механизма.
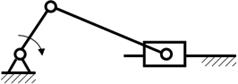 5. Кривошипно-ползунный.
5. Кривошипно-ползунный.
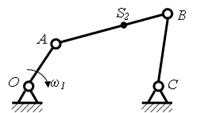
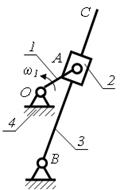
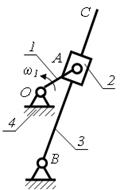
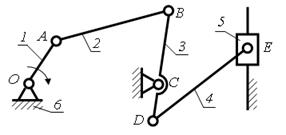
Укажите тип механизма.
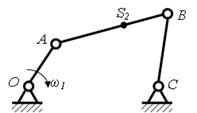
 1. Кривошипно-коромысловый.
1. Кривошипно-коромысловый.
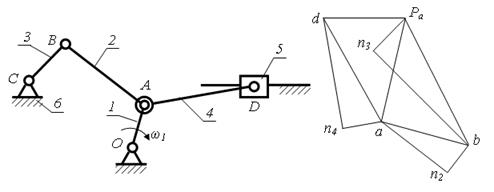
Укажите тип механизма.
 2. Кривошипно-кулисный.
2. Кривошипно-кулисный.
Укажите тип механизма.
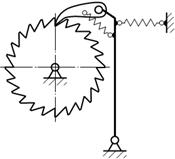 4. Храповой.
4. Храповой.
Укажите тип механизма.
 5. Мальтийский.
5. Мальтийский.
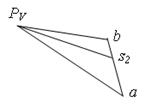
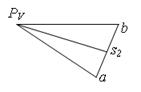
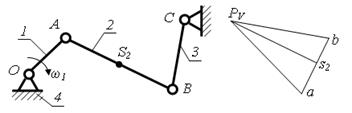
План скоростей для кривошипно-коромыслового механизма.
5. 
План скоростей для кривошипно-ползунного механизма.
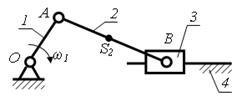 1.
1. 
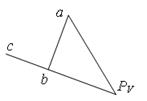
План скоростей для кривошипно-кулисного механизма.
 2.
2. 
План ускорений для кривошипно-коромыслового механизма.
 3.
3. 
124.) Укажите план ускорений для кривошипно-ползунного механизма.
4. 
125.) Укажите план ускорений для кривошипно-кулисного механизма.
 5.
5. 
126.) Укажите отрезок плана скоростей, изображающий скорость VB точки В механизма.
 1.
1.  .
.
127.) Укажите отрезок плана скоростей, изображающий скорость  точки В относительно точки А.
точки В относительно точки А.
 2.
2.  .
.
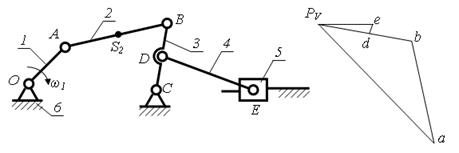
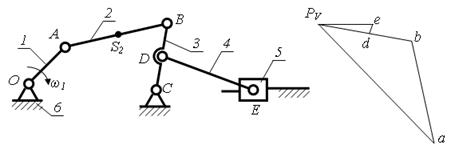
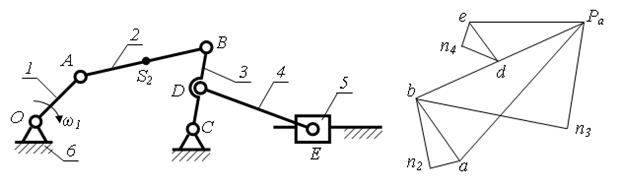
128.) Плечи коромысла 3 имеют размеры: lCB=300 мм; lCD=150 мм. Отрезок плана скоростей, изображающий скорость VB точки В механизма, PVb=70 мм. Какую длину должен иметь отрезок PVd плана скоростей?
 150*70/300= 35
150*70/300= 35
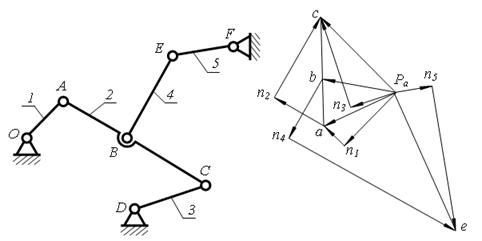
129.) Определите скорость точки D механизма,если масштабный коэффициент плана скоростей  , а длины отрезков на плане скоростей равны: PVa= 74 мм; PVb= 64 мм; PVd= 58 мм; ab= 54 мм; bd= 42 мм;
, а длины отрезков на плане скоростей равны: PVa= 74 мм; PVb= 64 мм; PVd= 58 мм; ab= 54 мм; bd= 42 мм;
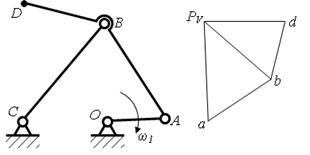 11.6
11.6
130.) Укажите отрезок плана ускорений, изображающий ускорение аВА точки А относительно точки В в шарнирном четырехзвеннике.
 5. ab.
5. ab.
131.) Укажите отрезок плана ускорений, изображающий касательное ускорение  точки В относительно точки А.
точки В относительно точки А.
 1.
1.  .
.
132.) Укажите отрезок плана ускорений, изображающий нормальное ускорение  точки В относительно точки А.
точки В относительно точки А.
2.  .
.
133.) Определите ускорение aD точки D механизма, если ускорение точки В равно  , а размеры плеч коромысла 3 равны:
, а размеры плеч коромысла 3 равны:  ,
,  .
.
 0.8*0.1/0.2= 0.4
0.8*0.1/0.2= 0.4
134.) Ускорение точки В механизма  . На плане ускорений Раb= 60 мм, Pad= 30 мм. Определите ускорение aD точки D.
. На плане ускорений Раb= 60 мм, Pad= 30 мм. Определите ускорение aD точки D.
 3
3
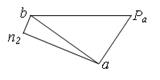
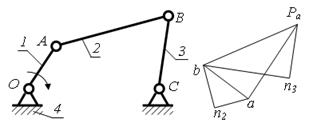
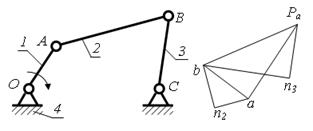
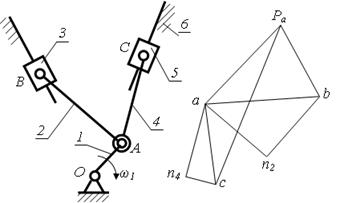
135.) На плане ускорений длины отрезков равны: Paа=78 мм; ап2=60 мм; n2b=24 мм; ab=64 мм; Pab=100 мм. Масштабный коэффициент плана ускорений  Определите касательное ускорение
Определите касательное ускорение  точки В механизма относительно точки А.
точки В механизма относительно точки А.
 4.8
4.8
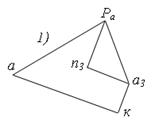
136.) Определите ускорение аС точки С механизма, если длины отрезков на плане ускорений равны: Paa= 80 мм; Pab= 60 мм; Рас= 124 мм;  ; ас= 58 мм. Масштабный коэффициент плана ускорений
; ас= 58 мм. Масштабный коэффициент плана ускорений 
 12.4
12.4
137.) Определите величину углового ускорения  шатуна 2, если
шатуна 2, если  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
2.4/0.12= 20
138.) Используя план скоростей, укажите звено механизма, угловая скорость которого в данный момент направлена против хода часовой стрелки.
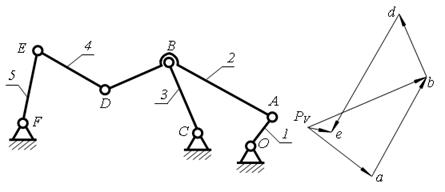 DE 4
DE 4
139.) Используя план ускорений, укажите звено механизма, угловое ускорение которого в данный момент направлено по ходу часовой стрелки.
 4 звено BE
4 звено BE
Уравновешивающая сила.
Мощностей.
152.) Укажите уравнение равновесия, которое нужно составить для определения уравновешивающей силы методом рычага Жуковского.
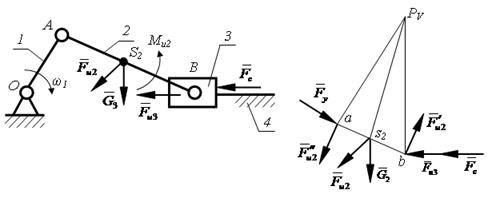
2.  .
.
153.) Каким должно быть расстояние h при замене силы инерции  , приложенной в точке S, и момента сил инерции
, приложенной в точке S, и момента сил инерции  одной силой, приложенной в точке K?
одной силой, приложенной в точке K?
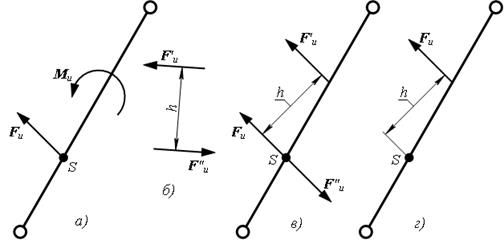
Мм
Эвольвентное.
157.) Укажите точку, которая называется полюсом зацепления, если  – касательная, а
– касательная, а  – нормаль к сопряженным профилям в точке контакта.
– нормаль к сопряженным профилям в точке контакта.
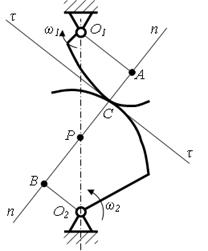 5. Р.
5. Р.
Основной окружности
Эвольвента окружности
Линия зацепления.
По линии зацепления.
К основным окружностям.
6,28
Формула модуля зацепления.
3.  .
.
174.) Формула, позволяющая определить минимальный коэффициент смещения зуборезного инструмента, при котором исключается подрезание зубьев, если угол профиля инструмента  .
.
4.  .
.
175.) Определите модуль прямозубого цилиндрического колеса, если делительный диаметр d= 36 мм, число зубьев z= 18.
Начальные
Делительная
Укажите тип передачи.
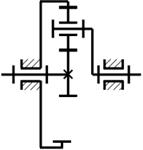
Планетарная с одной степенью свободы.
Укажите тип передачи.

Укажите тип передачи.
 2. Дифференциальная.
2. Дифференциальная.
Укажите тип передачи.
 3. Замкнутая дифференциальная.
3. Замкнутая дифференциальная.
Укажите сателлит.

Укажите водило.
Укажите опорное колесо.

218.) Формула передаточного отношения i1H данного планетарного механизма.

5.  .
.
219.) Формула передаточного отношения i1H данного планетарного механизма.
 1.
1.  .
.
220.) Формула передаточного отношения i1H данного планетарного механизма.
 2.
2.  .
.
221.) Формула передаточного отношения i1H данного планетарного механизма.
 3. .
3. .
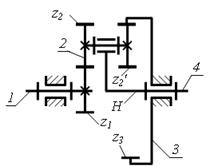
222.) Определите передаточное отношение i14 данного планетарного механизма, если z1= 20, z2= 18 и z3=80.
1+Z3/Z1= 1+4= 5
223.) Определите передаточное отношение i41 данного планетарного механизма, если z1= 20, z3= 80.
0.2
224.) Определите угловую скорость  водила, если угловая скорость центрального колеса
водила, если угловая скорость центрального колеса  , числа зубьев z1= 20, z3= 60.
, числа зубьев z1= 20, z3= 60.
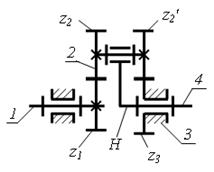
225.) Определите передаточное отношение i14 данного планетарного механизма, если z1= 18, z2= 36,  и z3= 81.
и z3= 81.
226.) Укажите условие соосности данного планетарного механизма.

2.  .
.
227.) Укажите условие соосности данного планетарного механизма, если все зубчатые колеса имеют одинаковый модуль.

3.  .
.
228.) Укажите условие соосности данного планетарного механизма, если все зубчатые колеса имеют одинаковый модуль.
4.  .
.
229.) Укажите условие соосности данного планетарного механизма, если все зубчатые колеса имеют одинаковый модуль.

4.  .
.
230.) Определите число зубьев z3 опорного колеса, если z1= 20 и z2= 24.

231.) Определите число зубьев z2 сателлита, если z1= 20 и z3= 80.
232.) Определите число зубьев  центрального ведущего колеса, если
центрального ведущего колеса, если  и
и  .
.
Угол зацепления.
Угол давления.
Угол трения.
Маховик.
Шатун.
280.) Укажите звено механизма, для которого кинетическая энергия может быть определена по зависимости: 
Ползун.
282.) Определите число степеней подвижности манипулятора типа "Маскот".

283.) Определите число степеней подвижности промышленного робота "Электроника НЦТМ - 01".

Рабочий объем.
Маневренность.
296.) Укажите характеристику манипулятора, определяемую следующей формулировкой: "Часть рабочего объема (рабочей зоны) манипулятора, в которой можно выполнить данную операцию, характеризуемую расположением схвата по отношению к объекту манипулирования".
Зона обслуживания.
297.) Укажите характеристику манипулятора, определяемую следующей формулировкой: "Телесный угол, внутри которого можно подвести захват к заданной точке рабочего объема манипулятора".
Угол сервиса.
298.) Укажите понятие, определяемое следующей формулировкой: "Устройство, в котором все преобразования энергии, материалов и информации выполняется без непосредственного участия человека".
Машина – автомат.
299.) Укажите понятие, определяемое следующей формулировкой: "Совокупность машин – автоматов, соединенных между собой автоматическими транспортными устройствами".
Автоматическая линия.
Циклограмма.
Пример энергетической машины.
3. Электродвигатель.
Пример технологической машины.
4. Токарно-винторезный станок.
Пример транспортной машины.
5. Вертолет.
Такая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого звена цепи все остальные звенья совершают однозначно определяемые движения.
1. Механизм.






